| Citation: | TANG Ming, LI Yuanyuan. Indoor obstacle detection system based on monocular vision and ultrasound applied to an intelligent car[J]. Journal of Shanghai University of Engineering Science, 2022, 36(1): 69-76. doi: 10.12299/jsues.21-0136

|
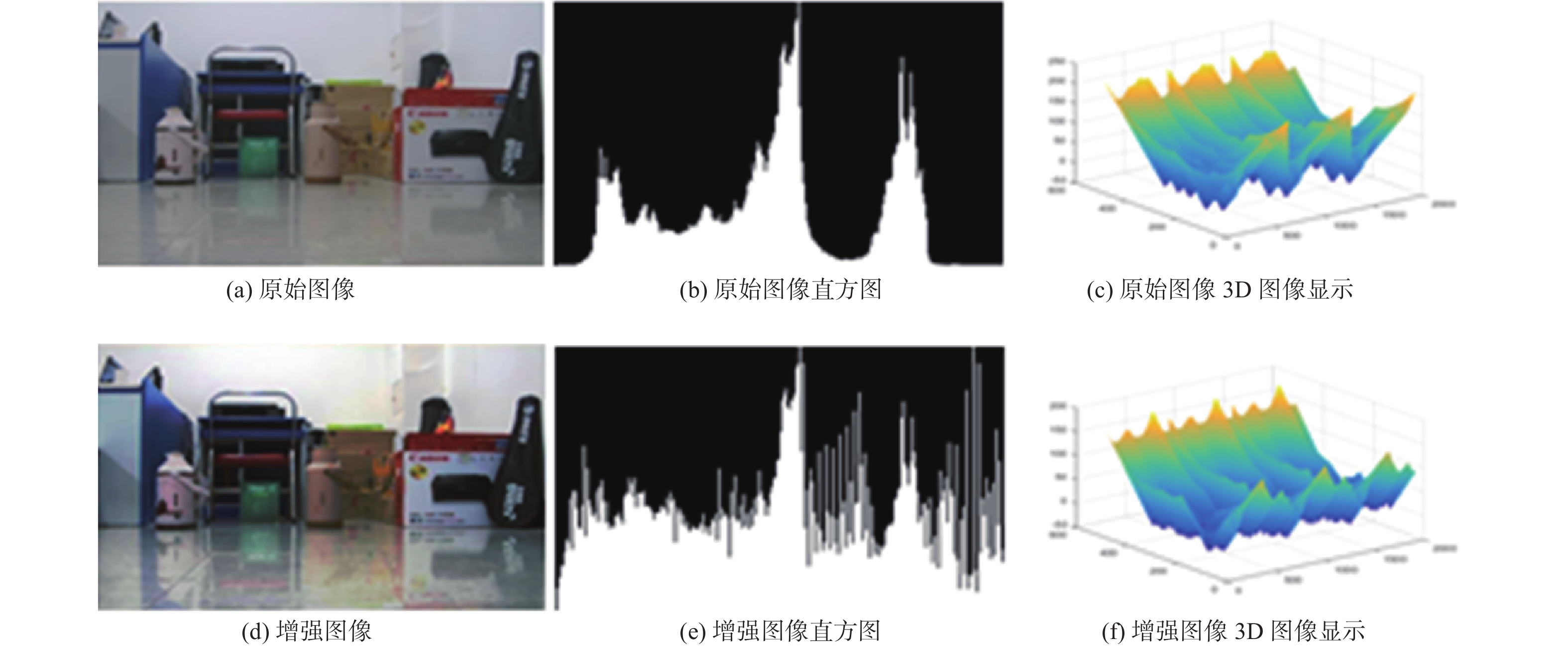
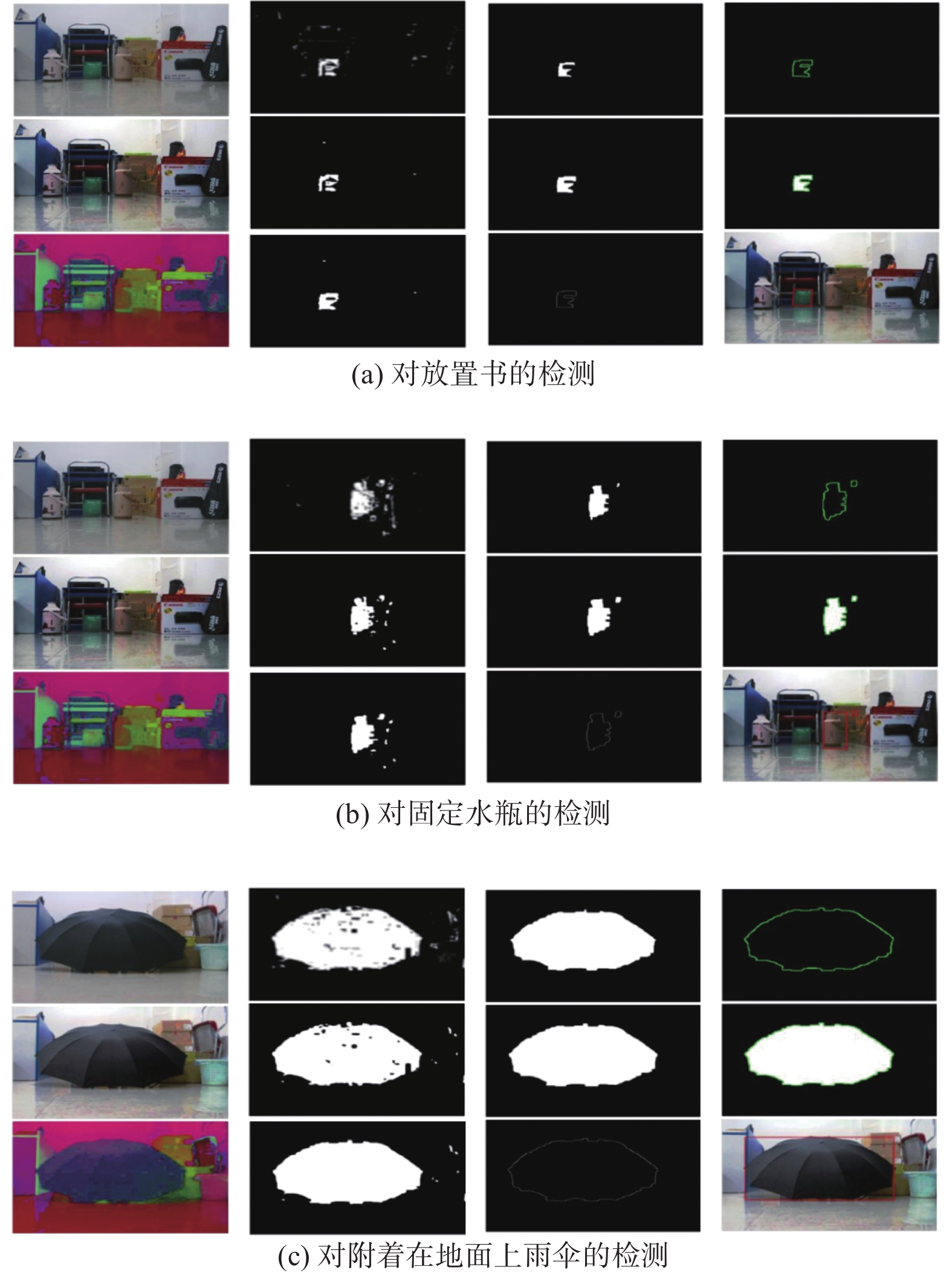
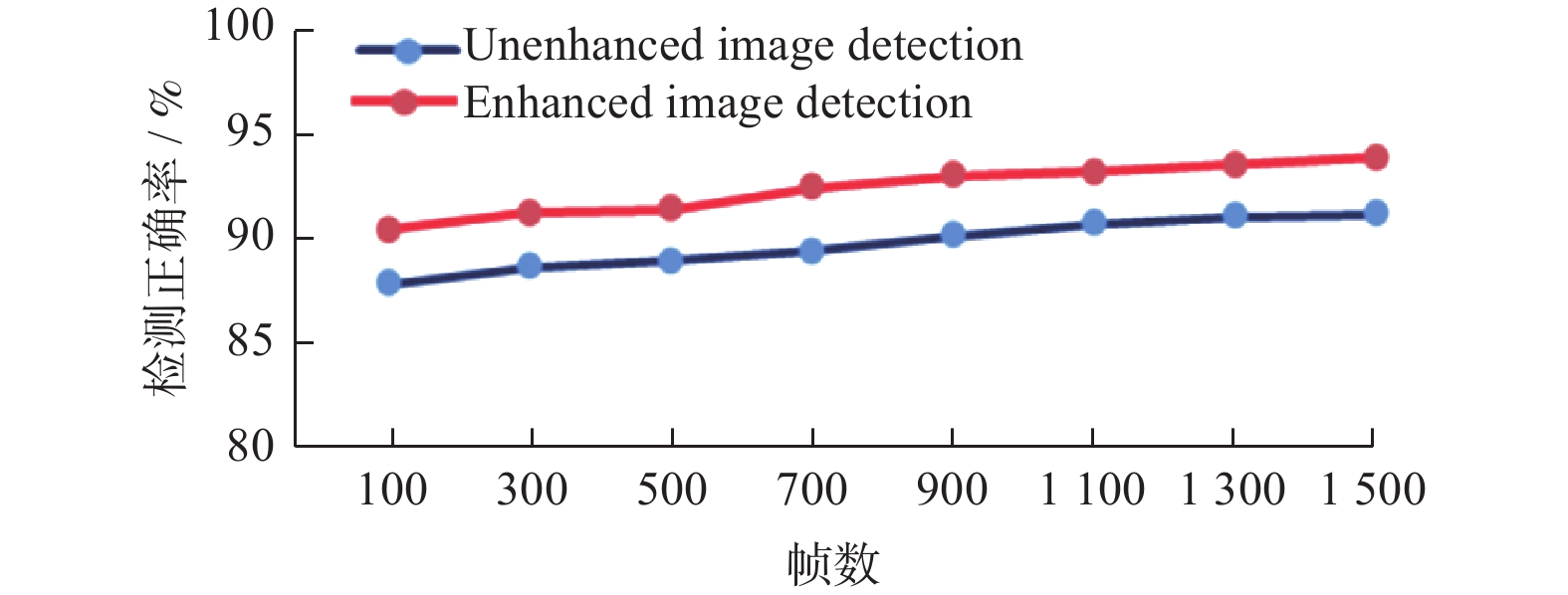
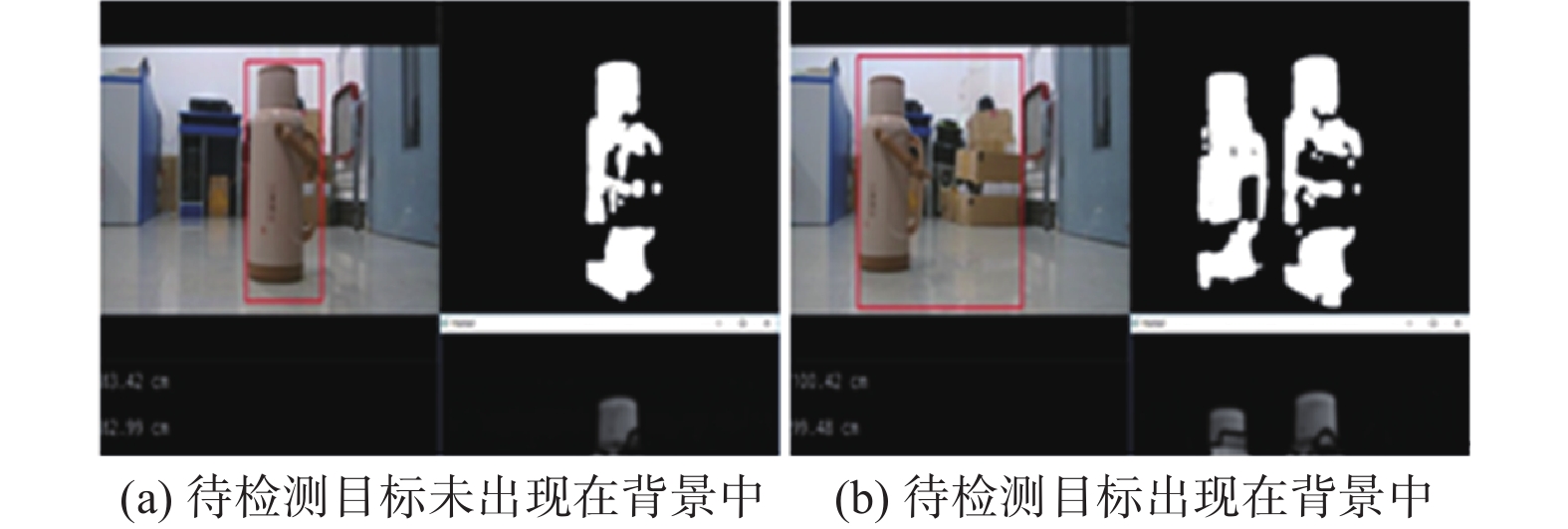
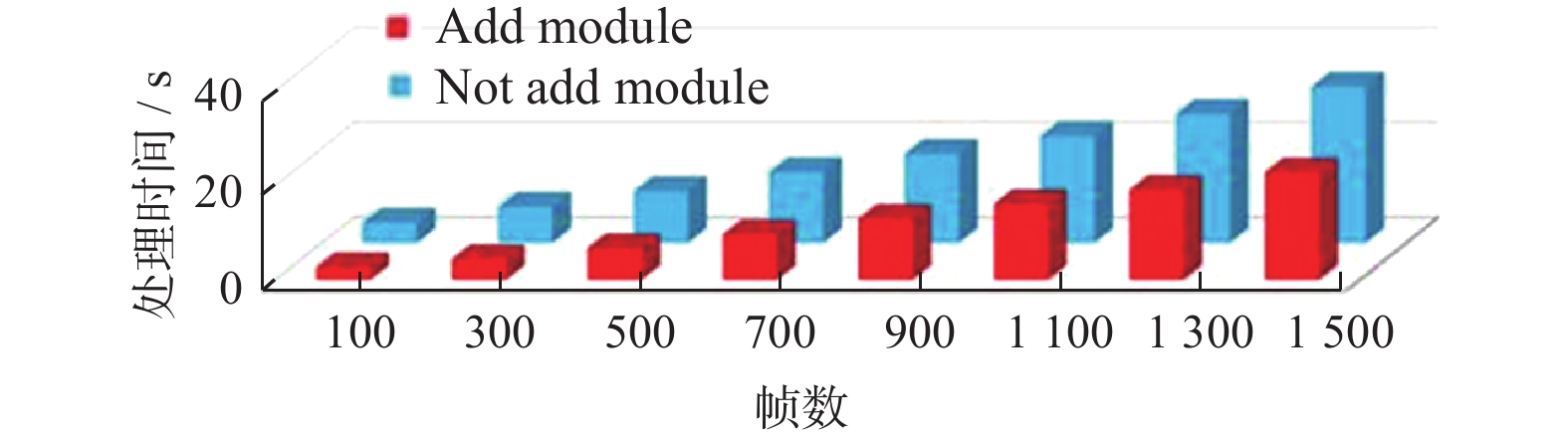
A method based on monocular vision and ultrasonic ranging for the intelligent Raspberry Pi robot for detecting static and dynamic obstacles was proposed. An improved monocular visual obstacle detection algorithm was applied to perform contour detection on indoor static and dynamic obstacles, the distance was measured between the robot car and obstacles with an ultrasonic sensor. For static obstacle detection, image enhancement was introduced in the image preprocessing stage, and different obstacle color features were extracted through HSV images to improve the efficiency and accuracy of obstacle contour calibration. For dynamic obstacle detection, background difference was combined with 3D image display technology to achieve dynamic target capture, and a distance decision module was set up to record obstacle location information. The experimental results show that the method can effectively reduce the average consumption time of obstacle detection, and improve the accuracy of indoor obstacle detection.

| [1] |
OHYA I, KOSAKA A, KAK A. Vision-based navigation by a mobile robot with obstacle avoidance using single-camera vision and ultrasonic sensing[J] . IEEE Transactions on Robotics and Automation,1998,14(6):969 − 978. doi: 10.1109/70.736780
|
| [2] |
XU Z, MIN B, CHEUNG R. A robust background initialization algorithm with superpixel motion detection[J] . Signal Processing: Image Communication,2019,71:1 − 12. doi: 10.1016/j.image.2018.07.004
|
| [3] |
QIU K J, LIU T B, SHEN S J. Model-based global localization for aerial robots using edge aligmennt[J] . IEEE Robotics and Automation Letters,2017,2(3):1256 − 1263. doi: 10.1109/LRA.2017.2660063
|
| [4] |
CAI S Z, HUANG Y B, YE B, et al. Dynamic illumination optical flow computing for sensing multiple mobile robots from a drone[J] . IEEE Transactions on Systems, Man, and Cybernetics: Systems,2018,48(8):1370 − 1382.
|
| [5] |
CAI G R, SU S Z, HE W L, et al. Combining 2D and 3D features to improve road detection based on stereo cameras[J] . IET Computer Vision,2018,12(6):834 − 843. doi: 10.1049/iet-cvi.2017.0266
|
| [6] |
STOLOJESCU-CRISAN C, HOLBAN S. A Comparison of X-ray image segmentation techniques[J] . Advances in Electrical & Computer Engineering,2013,13(3):85 − 92.
|
| [7] |
ZHAO J P, ZHANG Z H, YU W X, et al. A cascade coupled convolutional neural network guided visual attention method for ship detection from SAR images[J] . IEEE Access,2018,6:50693 − 50708. doi: 10.1109/ACCESS.2018.2812929
|
| [8] |
GARCIA F, SCHOCKAERT C, MIRBACH B. Real-time visualization of low contrast targets from high-dynamic range infrared images based on temporal digital detail enhancement filter[J] . Journal of Electronic Imaging,2015,24(6):061103. doi: 10.1117/1.JEI.24.6.061103
|
| [9] |
CHEN Z, WANG S W, YIN F L. A time delay estimation method based on wavelet transform and speech envelope for distributed microphone arrays[J] . Advances in Electrical and Computer Engineering,2013,13(3):39 − 44. doi: 10.4316/AECE.2013.03007
|
| [10] |
FAN L, XIA G Q, TANG X, et al. Tunable ultra-broadband microwave frequency combs generation based on a current modulated semiconductor laser under optical injection[J] . IEEE Access,2017,5:17764 − 17771. doi: 10.1109/ACCESS.2017.2737665
|
| [11] |
XU H Y, YU M, LUO T, et al. Parts-based stereoscopic image assessment by learning binocular manifold color visual properties[J] . Journal of Electronic Imaging,2016,25(6):1 − 10.
|
| [12] |
ZHU X W, LEI X S, SUI Z H, et al. Research on detection method of UAV obstruction based on binocular vision[C]// Proceedings of the 2nd International Conference on Advances in Materials, Machinery, Electronics. Xi'an: AMME, 2018: 040010.
|
| [13] |
ZHANG E S, WANG S B. Plane-space algorithm based on binocular stereo vision with its estimation of range and measurement boundary[J] . IEEE Access,2018,6:62450 − 62457. doi: 10.1109/ACCESS.2018.2875760
|
| [14] |
FLACCO F, DE LUCA A. Real-time computation of distance to dynamic obstacles with multiple depth sensors[J] . IEEE Robotics & Automation Letters,2017,2(1):56 − 63.
|
| [15] |
ZHANG T Y, HU H M, LI B. A naturalness preserved fast dehazing algorithm using HSV color space[J] . IEEE Access,2018,6:10644 − 10649.
|
| [16] |
YOON I, KIM S, KIM D, et al. Adaptive defogging with color correction in the HSV color space for consumer surveillance system[J] . IEEE Transactions on Consumer Electronics,2012,58(1):111 − 116. doi: 10.1109/TCE.2012.6170062
|
| [17] |
WO Y, CHEN X, HAN G Q. A saliency detection model using aggregation degree of color and texture[J] . Signal Processing: Image Communication,2015,30:121 − 136. doi: 10.1016/j.image.2014.10.004
|
| [18] |
DAS P, KIM B Y, PARK Y, et al. A new color space based constellation diagram and modulation scheme for color independent VLC[J] . Advances in Electrical & Computer Engineering,2012,12(4):11 − 18.
|
| [19] |
TSAI V J. A comparative study on shadow compensation of color aerial images in invariant color models[J] . IEEE Transactions on Geoscience & Remote Sensing,2006,44(6):1661 − 1671.
|
| [20] |
RIAD R, HARBA R, DOUZI H, et al. Robust fourier watermarking for id images on smart card plastic supports[J] . Advances in Electrical & Computer Engineering,2016,16(4):21 − 28.
|
| [21] |
BAO P, ZHANG L, WU X L. Canny edge detection enhancement by scale multiplication[J] . IEEE Transactions on Pattern Analysis and Machine Intelligence,2005,27(9):1485 − 1490. doi: 10.1109/TPAMI.2005.173
|
| [22] |
ZHANG X G, HUANG T J, TIAN Y H, et al. Background-modeling-based adaptive prediction for surveillance video coding[J] . IEEE Transactions on Image Processing,2014,23(2):769 − 784. doi: 10.1109/TIP.2013.2294549
|

Figures(12) / Tables(2)
Copyright © Journal of Shanghai University of Engineering Science沪ICP备05052046号
Tel:86-21-67791000 Email:xuebao@sues.edu.cn
Address:333 Longteng Road, Shanghai, China China Pos:201620
Supported by:
Beijing Renhe Information Technology Co. Ltd



 DownLoad:
DownLoad: