Articles in press have been peer-reviewed and accepted, which are not yet assigned to volumes /issues, but are citable by Digital Object Identifier (DOI).
Display Method:
2026, 40(1): 1-9.
doi: 10.12299/jsues.24-0171
Abstract:
Aiming at the problems of oscillation and overshoot in the contactless drive of a hybrid magnetized magnetic gear motor (HM-MGM), a method combining an improved dragonfly algorithm (IDA) with (proportional-integral) PI control was proposed to adjust the PI controller parameters. The performance of the algorithm was improved by introducing Tent map for initialization group, improving weight coefficients and incorporating a differential evolution algorithm. Furthermore, the fitness function of the algorithm was improved by adding a penalty term to suppress overshoot and oscillation. Based on the HM-MGM simulation model, a comparative study was conducted using PI, DA-PI and IDA-PI control methods. The results show that the system under IDA-PI control exhibits a faster dynamic response, with significantly reduced overshoot and steady-state error, thereby validating the effectiveness of the proposed method.
Aiming at the problems of oscillation and overshoot in the contactless drive of a hybrid magnetized magnetic gear motor (HM-MGM), a method combining an improved dragonfly algorithm (IDA) with (proportional-integral) PI control was proposed to adjust the PI controller parameters. The performance of the algorithm was improved by introducing Tent map for initialization group, improving weight coefficients and incorporating a differential evolution algorithm. Furthermore, the fitness function of the algorithm was improved by adding a penalty term to suppress overshoot and oscillation. Based on the HM-MGM simulation model, a comparative study was conducted using PI, DA-PI and IDA-PI control methods. The results show that the system under IDA-PI control exhibits a faster dynamic response, with significantly reduced overshoot and steady-state error, thereby validating the effectiveness of the proposed method.













2026, 40(1): 10-17.
doi: 10.12299/jsues.24-0235
Abstract:
To address the shortcomings of current six-degree-of-freedom (6-DOF) compliant mechanisms, such as limited travel range and large cumulative errors, a novel 6-DOF parallel compliant mechanism for electromagnetically driven micro-nano positioning was designed. Kinematic analysis was conducted on the components and structural characteristics of the new 6-DOF compliant positioning mechanism, and a kinematic model was established and derived. Furthermore, based on the force-deformation characteristics of the compliant units and the geometric characteristics of the parallel mechanism, a static compliance analytical model of the 6-DOF compliant mechanism was established using the compliance matrix method. The analytical model was verified through finite element software. The research results can provide a reference for the design and application of multi-degree-of-freedom micro-nano positioning platforms.
To address the shortcomings of current six-degree-of-freedom (6-DOF) compliant mechanisms, such as limited travel range and large cumulative errors, a novel 6-DOF parallel compliant mechanism for electromagnetically driven micro-nano positioning was designed. Kinematic analysis was conducted on the components and structural characteristics of the new 6-DOF compliant positioning mechanism, and a kinematic model was established and derived. Furthermore, based on the force-deformation characteristics of the compliant units and the geometric characteristics of the parallel mechanism, a static compliance analytical model of the 6-DOF compliant mechanism was established using the compliance matrix method. The analytical model was verified through finite element software. The research results can provide a reference for the design and application of multi-degree-of-freedom micro-nano positioning platforms.








2026, 40(1): 18-22, 29.
doi: 10.12299/jsues.24-0206
Abstract:
The problem of global asymptotic frequency synchronization for complex power networks was investigated, and a novel cooperative control strategy was proposed. The strategy simultaneously controlled both the generator and load sides, and achieved global frequency synchronization in complex power networks. Compared with the traditional linearization methods, the restriction that the bus voltage phase difference must not exceed $0.5{\text{π}} $ was eliminated by the proposed cooperative control strategy. This indicates that asymptotic frequency synchronization can be achieved for complex power networks with any bus voltage phase difference, which expands the system's application scenarios. In addition, based on Lyapunov stability theory, sufficient conditions for the complex power network to achieve global asymptotic frequency synchronization were derived. Finally, the simulation results demonstrate that the proposed method is correct and effective.
The problem of global asymptotic frequency synchronization for complex power networks was investigated, and a novel cooperative control strategy was proposed. The strategy simultaneously controlled both the generator and load sides, and achieved global frequency synchronization in complex power networks. Compared with the traditional linearization methods, the restriction that the bus voltage phase difference must not exceed $0.5{\text{π}} $ was eliminated by the proposed cooperative control strategy. This indicates that asymptotic frequency synchronization can be achieved for complex power networks with any bus voltage phase difference, which expands the system's application scenarios. In addition, based on Lyapunov stability theory, sufficient conditions for the complex power network to achieve global asymptotic frequency synchronization were derived. Finally, the simulation results demonstrate that the proposed method is correct and effective.

2026, 40(1): 23-29.
doi: 10.12299/jsues.24-0205
Abstract:
To address the decline in rolling bearing fault diagnosis performance caused by imbalanced fault samples, a fault diagnosis method based on correlation frequency loss generative adversarial network (GAN) was proposed. The mutual correlation between real and generated data was calculated to quantitatively analyze their differences in the frequency domain. which was used to guide model training, improve the similarity between the generated and real data, and overcome the difficulty of synthesizing fault frequencies in the data. Finally, a convolutional neural network (CNN) was employed for fault diagnosis. The proposed method is experimentally validated using the Case Western Reserve University bearing dataset. Under imbalance ratios of 10:1, 20:1 and 50:1, the sample generation capability of the correlation frequency loss GAN was significantly higher than that of other methods, leading to a marked improvement in the fault recognition rate. This results verifies the effectiveness and superiority of the proposed method.
To address the decline in rolling bearing fault diagnosis performance caused by imbalanced fault samples, a fault diagnosis method based on correlation frequency loss generative adversarial network (GAN) was proposed. The mutual correlation between real and generated data was calculated to quantitatively analyze their differences in the frequency domain. which was used to guide model training, improve the similarity between the generated and real data, and overcome the difficulty of synthesizing fault frequencies in the data. Finally, a convolutional neural network (CNN) was employed for fault diagnosis. The proposed method is experimentally validated using the Case Western Reserve University bearing dataset. Under imbalance ratios of 10:1, 20:1 and 50:1, the sample generation capability of the correlation frequency loss GAN was significantly higher than that of other methods, leading to a marked improvement in the fault recognition rate. This results verifies the effectiveness and superiority of the proposed method.





2026, 40(1): 30-35.
doi: 10.12299/jsues.24-0212
Abstract:
To address the challenge of predicting photovoltaic (PV) power generation caused by its inherent randomness and uncertainty, a multi-head attention-based bidirectional long short-term memory (Bi-LSTM) model was proposed. Meteorological and PV system operation data highly correlated with power generation were extracted through Pearson correlation analysis, and data preprocessing was performed by combining outlier handling with standardization. Outlier handling reduces the impact of extreme data and mitigates gradient oscillation during training, while standardization ensures consistency in feature scales to avoid imbalanced weight learning. Different weights were assigned to critical temporal features by the multi-head attention mechanism to enhance the ability to capture PV power trends. Forward and backward dependencies in the time series were processed by the Bi-LSTM to improve adaptability to complex sequential data. Experimental results show that in the application to a PV plant in Xinjiang, the proposed model achieves significantly higher prediction accuracy than the traditional LSTM network, featuring lower errors and good promising application prospects.
To address the challenge of predicting photovoltaic (PV) power generation caused by its inherent randomness and uncertainty, a multi-head attention-based bidirectional long short-term memory (Bi-LSTM) model was proposed. Meteorological and PV system operation data highly correlated with power generation were extracted through Pearson correlation analysis, and data preprocessing was performed by combining outlier handling with standardization. Outlier handling reduces the impact of extreme data and mitigates gradient oscillation during training, while standardization ensures consistency in feature scales to avoid imbalanced weight learning. Different weights were assigned to critical temporal features by the multi-head attention mechanism to enhance the ability to capture PV power trends. Forward and backward dependencies in the time series were processed by the Bi-LSTM to improve adaptability to complex sequential data. Experimental results show that in the application to a PV plant in Xinjiang, the proposed model achieves significantly higher prediction accuracy than the traditional LSTM network, featuring lower errors and good promising application prospects.





2026, 40(1): 36-42, 61.
doi: 10.12299/jsues.24-0252
Abstract:
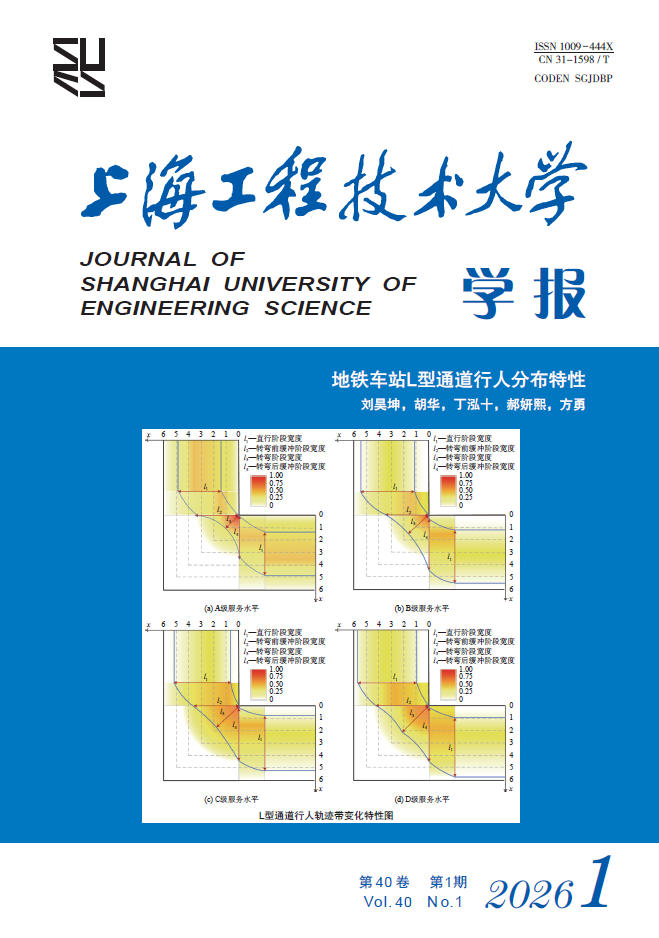
To quantitatively describe the uneven distribution characteristics of pedestrians in the direction of passageway width, two indicators—the track belt width and pedestrian distribution dispersion coefficient— were proposed. Calculation methods for these indicators were developed based on a probability and statistics model. Video data were collected from a typical L-shaped passageway in a subway station. The probability density function of pedestrian distribution was fitted under different service levels for various walking stages (straight zone, pre-turn buffer zone, turning zone, and post-turn buffer zone). The dispersion coefficient of pedestrian distribution and the variation law of pedestrian track belt width with walking stage and pedestrian flow were analyzed. The results show that the dispersion degree of pedestrian distribution increases as the pedestrian flow decreases, with greater variation amplitude in the two buffer stages before and after the turn. As pedestrian flow increases, the track belt width expands in all walking stages, with the fastest growth observed during the turning stage. During the turn, the centroid of pedestrian distribution shifts from the central axis of the passageway towards its interior. These insights offer a basis for organizing L-shaped pedestrian flow lines and designing facilities in subway stations.
To quantitatively describe the uneven distribution characteristics of pedestrians in the direction of passageway width, two indicators—the track belt width and pedestrian distribution dispersion coefficient— were proposed. Calculation methods for these indicators were developed based on a probability and statistics model. Video data were collected from a typical L-shaped passageway in a subway station. The probability density function of pedestrian distribution was fitted under different service levels for various walking stages (straight zone, pre-turn buffer zone, turning zone, and post-turn buffer zone). The dispersion coefficient of pedestrian distribution and the variation law of pedestrian track belt width with walking stage and pedestrian flow were analyzed. The results show that the dispersion degree of pedestrian distribution increases as the pedestrian flow decreases, with greater variation amplitude in the two buffer stages before and after the turn. As pedestrian flow increases, the track belt width expands in all walking stages, with the fastest growth observed during the turning stage. During the turn, the centroid of pedestrian distribution shifts from the central axis of the passageway towards its interior. These insights offer a basis for organizing L-shaped pedestrian flow lines and designing facilities in subway stations.







2026, 40(1): 43-48.
doi: 10.12299/jsues.24-0174
Abstract:
The fatigue of combined road-rail bridges is caused by the coupling effect of motor vehicle and train loads. To investigate this phenomenon, the measured vehicle load data from the weigh-in-motion (WIM) system and the structural health monitoring (SHM) system of a kilometer-span combined road-rail suspension bridge over the Yangtze River were analyzed in depth. Typical probability density function was employed to fit parameters related to vehicle loads. The results show that the vehicle load parameters for both the road and railway are similar. The mass of motor vehicles follows a multimodal distribution with heavy-tailed characteristics. The axle mass ratio of motor vehicles and the axle mass of trains are normally distributed. The speed of the V10 vehicle model follows a Gaussian mixture distribution, while speeds of other vehicle models are normally distributed. The headway follows a gamma distribution, with train headways being significantly longer than those of motor vehicles. The high consistency between the simulated random traffic flow and the measured traffic flow indicates that the established statistical model of vehicle loads is applicable to the fatigue analysis of combined road-rail bridges.
The fatigue of combined road-rail bridges is caused by the coupling effect of motor vehicle and train loads. To investigate this phenomenon, the measured vehicle load data from the weigh-in-motion (WIM) system and the structural health monitoring (SHM) system of a kilometer-span combined road-rail suspension bridge over the Yangtze River were analyzed in depth. Typical probability density function was employed to fit parameters related to vehicle loads. The results show that the vehicle load parameters for both the road and railway are similar. The mass of motor vehicles follows a multimodal distribution with heavy-tailed characteristics. The axle mass ratio of motor vehicles and the axle mass of trains are normally distributed. The speed of the V10 vehicle model follows a Gaussian mixture distribution, while speeds of other vehicle models are normally distributed. The headway follows a gamma distribution, with train headways being significantly longer than those of motor vehicles. The high consistency between the simulated random traffic flow and the measured traffic flow indicates that the established statistical model of vehicle loads is applicable to the fatigue analysis of combined road-rail bridges.








2026, 40(1): 49-54.
doi: 10.12299/jsues.24-0240
Abstract:
Fasteners are important components connecting the rail and the supporting structure. To facilitate research on fastener failure diagnosis methods, a track fastener failure diagnosis system integrating signal acquisition, storage, and analysis was developed based on LabVIEW. The NI-cRIO9056 chassis and the NI-9234 voltage module were used as the hardware to acquire the vibration signals. To address the difficulty in extracting the characteristic frequency of fastener failure, a method combining wavelet packet and Hilbert envelope spectrum was proposed. The acquired vibration signals were first subjected to wavelet packet decomposition, and signals in the frequency bands with large energy changes were reconstructed. Finally, the Hilbert envelope spectrum was used to identify the fastener status. Experimental results show that this method can accurately diagnose fastener failure.
Fasteners are important components connecting the rail and the supporting structure. To facilitate research on fastener failure diagnosis methods, a track fastener failure diagnosis system integrating signal acquisition, storage, and analysis was developed based on LabVIEW. The NI-cRIO9056 chassis and the NI-9234 voltage module were used as the hardware to acquire the vibration signals. To address the difficulty in extracting the characteristic frequency of fastener failure, a method combining wavelet packet and Hilbert envelope spectrum was proposed. The acquired vibration signals were first subjected to wavelet packet decomposition, and signals in the frequency bands with large energy changes were reconstructed. Finally, the Hilbert envelope spectrum was used to identify the fastener status. Experimental results show that this method can accurately diagnose fastener failure.










2026, 40(1): 55-61.
doi: 10.12299/jsues.24-0188
Abstract:
Photochromic polyester fabric was prepared using red color-changing microcapsules via high temperature and high pressure dyeing. The mass fraction of dispersant NNO and the dosage of microcapsules were optimized for the best color-changing effect. Orthogonal experiments were conducted to further investigate the factors affecting the color changing performance of the photochromic fabric, and the cyclic color-changing properties and color fastness to rubbing were evaluated. The results show that the fabric exhibits the best photochromic properties when the mass fraction of photochromic microcapsules is 7% and the dispersant mass concentration is 1.0 g/L. ultraviolet (UV) irradiance is identified as the most important factor affecting the color-changing effect, exerting the greatest influence on the color difference (ΔE) of the fabric. In addition, the fabric demonstrates excellent color fastness to rubbing, with dry and wet rubbing fastness both rated at grade 4-5. After 20 cycles of UV–visible light irradiation, the loss in color difference is only 11.54%.
Photochromic polyester fabric was prepared using red color-changing microcapsules via high temperature and high pressure dyeing. The mass fraction of dispersant NNO and the dosage of microcapsules were optimized for the best color-changing effect. Orthogonal experiments were conducted to further investigate the factors affecting the color changing performance of the photochromic fabric, and the cyclic color-changing properties and color fastness to rubbing were evaluated. The results show that the fabric exhibits the best photochromic properties when the mass fraction of photochromic microcapsules is 7% and the dispersant mass concentration is 1.0 g/L. ultraviolet (UV) irradiance is identified as the most important factor affecting the color-changing effect, exerting the greatest influence on the color difference (ΔE) of the fabric. In addition, the fabric demonstrates excellent color fastness to rubbing, with dry and wet rubbing fastness both rated at grade 4-5. After 20 cycles of UV–visible light irradiation, the loss in color difference is only 11.54%.





2026, 40(1): 62-67.
doi: 10.12299/jsues.24-0193
Abstract:
The turbine nozzle is an important component of aircraft. During the casting process of the turbine nozzle made of high-temperature alloy K439B, inclusions are prone to be generated, leading to a decrease in its performance. The finite element simulation software ProCAST was used to analyze the influence of pouring temperature and pouring speed on inclusion. The results show that the inclusions in the turbine nozzle castings tend to decrease as pouring temperature increases. With increasing pouring speed, the diameter of inclusions first increases and then decreases, while the number of inclusions decreases. The inclusions were the least when the pouring speed was 176 mm/s. The optimal process parameters were a pouring temperature of1520 ℃ and a pouring speed of 176 mm/s, under which inclusion defects were minimized. The finding can provide a reference for improving the casting process of the turbine nozzle, reducing inclusions and enhancing the performance of the castings.
The turbine nozzle is an important component of aircraft. During the casting process of the turbine nozzle made of high-temperature alloy K439B, inclusions are prone to be generated, leading to a decrease in its performance. The finite element simulation software ProCAST was used to analyze the influence of pouring temperature and pouring speed on inclusion. The results show that the inclusions in the turbine nozzle castings tend to decrease as pouring temperature increases. With increasing pouring speed, the diameter of inclusions first increases and then decreases, while the number of inclusions decreases. The inclusions were the least when the pouring speed was 176 mm/s. The optimal process parameters were a pouring temperature of









2026, 40(1): 68-73.
doi: 10.12299/jsues.24-0232
Abstract:
A dual cooling source dehumidifier with exhaust heat recovery function was proposed, which recovers the cooling capacity of indoor exhaust for fresh air cooling. The dehumidification performance was experimentally investigated, along with the effects of various air volumes and water supply temperatures. The results show that under the conditions of a water supply flow rate of 1.7m3/h, compressor power of 0.8 kW, water supply temperature of 13 ℃, and air flow rate of 350 m3/h, the moisture content at the air supply outlet can reach 7.6 g/kg in the fresh air dehumidification mode, and 7.4 g/kg in the indoor circulation dehumidification mode can reach g. Reducing the air volume or lowering the water supply temperature will improve the dehumidification performance of the dehumidifier.
A dual cooling source dehumidifier with exhaust heat recovery function was proposed, which recovers the cooling capacity of indoor exhaust for fresh air cooling. The dehumidification performance was experimentally investigated, along with the effects of various air volumes and water supply temperatures. The results show that under the conditions of a water supply flow rate of 1.7m3/h, compressor power of 0.8 kW, water supply temperature of 13 ℃, and air flow rate of 350 m3/h, the moisture content at the air supply outlet can reach 7.6 g/kg in the fresh air dehumidification mode, and 7.4 g/kg in the indoor circulation dehumidification mode can reach g. Reducing the air volume or lowering the water supply temperature will improve the dehumidification performance of the dehumidifier.













2026, 40(1): 74-80.
doi: 10.12299/jsues.24-0220
Abstract:
Leakage at the thread engagement of API oil casing affects the safety and efficiency of oil and gas extraction. A simulation method based on the thread grease sealing mechanism and nonlinear seepage theory was proposed, and the feasibility of the simulation prediction of thread grease sealing performance was verified. The sealing mechanism of the thread grease was revealed by the plugging mechanism of thread grease particles, the non-Newtonian characteristics of the base grease, and the nonlinear seepage theory. According to this sealing mechanism, the simulation of base grease seepage in the particle plugging section was realized. The results show that both temperature increase and particle size decrease lead to the reduction of the sealing performance of thread grease, and the predicted leakage resistance of thread grease is similar in magnitude to that under actual working conditions, which provides some guidance for the improvement of thread grease sealing performance and simulation prediction research.
Leakage at the thread engagement of API oil casing affects the safety and efficiency of oil and gas extraction. A simulation method based on the thread grease sealing mechanism and nonlinear seepage theory was proposed, and the feasibility of the simulation prediction of thread grease sealing performance was verified. The sealing mechanism of the thread grease was revealed by the plugging mechanism of thread grease particles, the non-Newtonian characteristics of the base grease, and the nonlinear seepage theory. According to this sealing mechanism, the simulation of base grease seepage in the particle plugging section was realized. The results show that both temperature increase and particle size decrease lead to the reduction of the sealing performance of thread grease, and the predicted leakage resistance of thread grease is similar in magnitude to that under actual working conditions, which provides some guidance for the improvement of thread grease sealing performance and simulation prediction research.











2026, 40(1): 81-87.
doi: 10.12299/jsues.24-0191
Abstract:
A systematic review was presented on vision-based detection techniques for unmanned container management, covering image preprocessing, object detection, and recognition. Detection algorithms were classified into “feature + classifier” models and deep learning models, with their application objects, advantages, and limitations summarized. Challenges and trends in typical port scenarios were discussed, along with research progress in key machine vision techniques for autonomous container reach stackers based on engineering practice. Current findings show that consensus has been reached on the integration of feature engineering and deep learning, as well as on the trade-offs between real-time perception and detection accuracy. However, limitations still exist under conditions such as illumination changes, occlusion, multi-scale detection, and scarce labeled data. Future research should focus on lightweight network design, multi-sensor fusion, and domain-adaptive transfer learning to facilitate engineering deployment and intelligent upgrading of port container detection.
A systematic review was presented on vision-based detection techniques for unmanned container management, covering image preprocessing, object detection, and recognition. Detection algorithms were classified into “feature + classifier” models and deep learning models, with their application objects, advantages, and limitations summarized. Challenges and trends in typical port scenarios were discussed, along with research progress in key machine vision techniques for autonomous container reach stackers based on engineering practice. Current findings show that consensus has been reached on the integration of feature engineering and deep learning, as well as on the trade-offs between real-time perception and detection accuracy. However, limitations still exist under conditions such as illumination changes, occlusion, multi-scale detection, and scarce labeled data. Future research should focus on lightweight network design, multi-sensor fusion, and domain-adaptive transfer learning to facilitate engineering deployment and intelligent upgrading of port container detection.



2026, 40(1): 88-94.
doi: 10.12299/jsues.24-0203
Abstract:
Traffic sign detection plays a crucial role in driver assistance system, contributing significantly to driving safety and traffic efficiency. To address the challenges posed by the small size, wide variety and complex background interference of traffic signs, a traffic sign detection algorithm based on improved YOLOv8-s, named BTSD-YOLO, was proposed. By integrating the multi-level structure of the BiFPN, the multi-scale feature fusion capability of the model was enhanced. A small object detection layer was added to strengthen the detection capability for small-sized targets. The WIoU_v3 loss function was adopted to reduce harmful gradients generated by low-quality examples. The results indicate that the proposed algorithm can significantly enhance detection ability of small targets, and optimize the fusion mechanism of multi-scale information, effectively reducing false positive and false negative rates. Compared with the original YOLOv8-s algorithm, the improved algorithm achieves a 6.9% increase on the COCO accuracy evaluation index mAP@50 index, and a 6.0% increase on the mAP@50:95 metric, fully validating the effectiveness of the proposed improvement.
Traffic sign detection plays a crucial role in driver assistance system, contributing significantly to driving safety and traffic efficiency. To address the challenges posed by the small size, wide variety and complex background interference of traffic signs, a traffic sign detection algorithm based on improved YOLOv8-s, named BTSD-YOLO, was proposed. By integrating the multi-level structure of the BiFPN, the multi-scale feature fusion capability of the model was enhanced. A small object detection layer was added to strengthen the detection capability for small-sized targets. The WIoU_v3 loss function was adopted to reduce harmful gradients generated by low-quality examples. The results indicate that the proposed algorithm can significantly enhance detection ability of small targets, and optimize the fusion mechanism of multi-scale information, effectively reducing false positive and false negative rates. Compared with the original YOLOv8-s algorithm, the improved algorithm achieves a 6.9% increase on the COCO accuracy evaluation index mAP@50 index, and a 6.0% increase on the mAP@50:95 metric, fully validating the effectiveness of the proposed improvement.







2026, 40(1): 95-100.
doi: 10.12299/jsues.24-0241
Abstract:
Monitoring of human vital signs facilitates early detection of potential diseases, guidance for clinical intervention, and promotion of rehabilitation. Compared with traditional sensors such as capacitive, inductive, micro-turbine, and thermistor sensors, fiber Bragg grating (FBG) sensors are characterized by good linearity, high sensitivity, anti-electromagnetic interference, and ease of integration, and thus are considered to have promising prospects in human vital sign monitoring. The application status of FBG sensors in monitoring four major vital sign parameters (body temperature, blood pressure, pulse, and respiration) was systematically reviewed. It is found that FBG sensors are feasible for all four parameters. Improvements have been achieved particularly in signal quality and comfort. Multi-parameter combined monitoring is recognized as a research hotspot. Future efforts should focus on integrating intelligent algorithms and compact design to promote clinical early warning and remote rehabilitation applications.
Monitoring of human vital signs facilitates early detection of potential diseases, guidance for clinical intervention, and promotion of rehabilitation. Compared with traditional sensors such as capacitive, inductive, micro-turbine, and thermistor sensors, fiber Bragg grating (FBG) sensors are characterized by good linearity, high sensitivity, anti-electromagnetic interference, and ease of integration, and thus are considered to have promising prospects in human vital sign monitoring. The application status of FBG sensors in monitoring four major vital sign parameters (body temperature, blood pressure, pulse, and respiration) was systematically reviewed. It is found that FBG sensors are feasible for all four parameters. Improvements have been achieved particularly in signal quality and comfort. Multi-parameter combined monitoring is recognized as a research hotspot. Future efforts should focus on integrating intelligent algorithms and compact design to promote clinical early warning and remote rehabilitation applications.

2026, 40(1): 101-106.
doi: 10.12299/jsues.24-0225
Abstract:
To reduce energy consumption and drying time in corn drying, the conventional storage form of corn was taken as the research object. A corn model was established in SolidWorks, and computational fluid dynamics simulations were conducted using Fluent to analyze water loss during the drying process. By changing the overall structure of corn, the drying performance of corn in the coreless state and the conventional state were compared under the same temperature and wind speed conditions. The results show that under the same working conditions, the moisture content of coreless corn grains decreases to 12%~14%, meeting the standard for high-quality seed storage. The overall drying efficiency is improved by approximately 37.4%, while ensuring the integrity of corn seeds and achieving a higher germination rate.
To reduce energy consumption and drying time in corn drying, the conventional storage form of corn was taken as the research object. A corn model was established in SolidWorks, and computational fluid dynamics simulations were conducted using Fluent to analyze water loss during the drying process. By changing the overall structure of corn, the drying performance of corn in the coreless state and the conventional state were compared under the same temperature and wind speed conditions. The results show that under the same working conditions, the moisture content of coreless corn grains decreases to 12%~14%, meeting the standard for high-quality seed storage. The overall drying efficiency is improved by approximately 37.4%, while ensuring the integrity of corn seeds and achieving a higher germination rate.







2017, 31(2): 174-177,182.
doi: 10.3969/j.issn.1009-444X.2017.02.016
摘要:
随着纺织印染行业的不断发展,纺织印染废水成分也日益复杂,大大增加了废水处理难度.针对纺织印染废水的来源和水质特点,综述了国内外纺织印染废水处理技术的研究进展,包括物理处理法、化学处理法和生物处理法,分析了各类处理方法的机制、处理效果及其优缺点.对纺织印染废水处理技术的发展前景进行了展望,指出优化组合废水处理工艺可提高纺织印染废水处理效果及综合回用率.
随着纺织印染行业的不断发展,纺织印染废水成分也日益复杂,大大增加了废水处理难度.针对纺织印染废水的来源和水质特点,综述了国内外纺织印染废水处理技术的研究进展,包括物理处理法、化学处理法和生物处理法,分析了各类处理方法的机制、处理效果及其优缺点.对纺织印染废水处理技术的发展前景进行了展望,指出优化组合废水处理工艺可提高纺织印染废水处理效果及综合回用率.
2018, 32(1): 64-67.
doi: 10.3969/j.issn.1009-444X.2018.01.014
摘要:
交通数据质量是影响交通控制方法有效实施的关键因素之一.为进一步提升交通数据的准确性和时效性,对比分析交通预处理方法,采用标准差公式对拉依达准则进行优化,设计一种适用于交通异常数据检测和修复的优化方法,并结合上海城市快速路实际数据对模型有效性和时效性进行检验.结果表明,基于拉依达准则的数据处理优化方法能够有效、实时地检测交通异常数据、改善数据质量,为道路交通状况的监测和预警提供数据支持.
交通数据质量是影响交通控制方法有效实施的关键因素之一.为进一步提升交通数据的准确性和时效性,对比分析交通预处理方法,采用标准差公式对拉依达准则进行优化,设计一种适用于交通异常数据检测和修复的优化方法,并结合上海城市快速路实际数据对模型有效性和时效性进行检验.结果表明,基于拉依达准则的数据处理优化方法能够有效、实时地检测交通异常数据、改善数据质量,为道路交通状况的监测和预警提供数据支持.
2020, 34(3): 238-246.
doi: 10.3969/j.issn.1009-444X.2020.03.006
摘要:
针对机械臂关节空间轨迹规划的时间优化问题,结合机械臂运动约束,提出基于非线性动态改变惯性权重的粒子群优化(NPSO)算法.根据传统3-5-3多项式插值方法,采用改进粒子群算法寻求最短关节运动时间,研究线性递减改变惯性权重(LPSO)算法和NPSO算法的性能,选用NPSO算法完成关节运动时间最优求解.研究结果显示,经时间优化后的3-5-3插值曲线连续光滑且具备更好的运动特性,整体运动时间缩短约26%,证实提出的方法具有可行性.
针对机械臂关节空间轨迹规划的时间优化问题,结合机械臂运动约束,提出基于非线性动态改变惯性权重的粒子群优化(NPSO)算法.根据传统3-5-3多项式插值方法,采用改进粒子群算法寻求最短关节运动时间,研究线性递减改变惯性权重(LPSO)算法和NPSO算法的性能,选用NPSO算法完成关节运动时间最优求解.研究结果显示,经时间优化后的3-5-3插值曲线连续光滑且具备更好的运动特性,整体运动时间缩短约26%,证实提出的方法具有可行性.
2017, 31(4): 371-375.
doi: 10.3969/j.issn.1009-444X.2017.04.017
摘要:
老年人参与各项社会活动,能够延缓衰老,促进身体健康、提高生活质量.通过开展调研探究了老年人的社会参与意愿及其影响因素.调查发现,城市老年人对经济、政治、社区、文化等各项活动的参与意愿都较高,但是多数的参与停留在被动层面;年龄、性别、文化程度、健康状况等因素会影响参与意愿,且不同活动受影响的程度不同;参与意愿会受到现实条件的约束,如照看小孩,料理家务等.
老年人参与各项社会活动,能够延缓衰老,促进身体健康、提高生活质量.通过开展调研探究了老年人的社会参与意愿及其影响因素.调查发现,城市老年人对经济、政治、社区、文化等各项活动的参与意愿都较高,但是多数的参与停留在被动层面;年龄、性别、文化程度、健康状况等因素会影响参与意愿,且不同活动受影响的程度不同;参与意愿会受到现实条件的约束,如照看小孩,料理家务等.
2021, 35(3): 237-242.
摘要:
针对传统光流法处理视频序列时存在运行效率低及跟踪偏移问题,结合粒子滤波模型提出一种改进光流法的视频目标跟踪技术. 该技术首先通过遍历法搜索运动点,采用质心定位方式捕获目标质心坐标,然后将得到的视频序列进行光流处理,最后经粒子滤波求解质心运动信息,以实现对视频中目标的精确检测与追踪. 在不同场景下对不同数量、不同类型目标进行仿真跟踪试验,并与光流法、ViBe算法及YOLO算法进行比较. 仿真结果表明,该跟踪技术可使目标跟踪的精准率有效提高5.2%,跟踪效率提高13.7%,同时表现出较好的鲁棒性.
针对传统光流法处理视频序列时存在运行效率低及跟踪偏移问题,结合粒子滤波模型提出一种改进光流法的视频目标跟踪技术. 该技术首先通过遍历法搜索运动点,采用质心定位方式捕获目标质心坐标,然后将得到的视频序列进行光流处理,最后经粒子滤波求解质心运动信息,以实现对视频中目标的精确检测与追踪. 在不同场景下对不同数量、不同类型目标进行仿真跟踪试验,并与光流法、ViBe算法及YOLO算法进行比较. 仿真结果表明,该跟踪技术可使目标跟踪的精准率有效提高5.2%,跟踪效率提高13.7%,同时表现出较好的鲁棒性.
Numerical Simulation Analysis on Air Distribution of Inter-Column Air Conditioning in a Machine Room
2018, 32(3): 244-249.
doi: 10.3969/j.issn.1009-444X.2018.03.009
摘要:
以上海某数据中心机房为研究对象,针对机房服务器散热量大的特点及传统封闭冷通道存在的问题,提出适合该机房的封闭热通道方案.采用计算流体动力学(CFD)模拟的方法,分析机房内封闭热通道与传统封闭冷通道的温度场和速度场分布特性.通过模拟分析得出:大散热量机房列间空调采用封闭热通道形式效果更佳.
以上海某数据中心机房为研究对象,针对机房服务器散热量大的特点及传统封闭冷通道存在的问题,提出适合该机房的封闭热通道方案.采用计算流体动力学(CFD)模拟的方法,分析机房内封闭热通道与传统封闭冷通道的温度场和速度场分布特性.通过模拟分析得出:大散热量机房列间空调采用封闭热通道形式效果更佳.
2019, 33(3): 215-218,277.
doi: 10.3969/j.issn.1009-444X.2019.03.005
摘要:
综述了二氧化硅(SiO2)薄膜的制备方法和研究进展,介绍了磁控溅射、溶胶凝胶法和真空镀等SiO2薄膜制备方法及其优缺点,论述SiO2薄膜在光学、电学和光电等性能研究方面的新进展,最后对SiO2薄膜的应用和发展进行了展望.
综述了二氧化硅(SiO2)薄膜的制备方法和研究进展,介绍了磁控溅射、溶胶凝胶法和真空镀等SiO2薄膜制备方法及其优缺点,论述SiO2薄膜在光学、电学和光电等性能研究方面的新进展,最后对SiO2薄膜的应用和发展进行了展望.
2018, 32(3): 214-220.
doi: 10.3969/j.issn.1009-444X.2018.03.004
摘要:
介绍功能纺织品的分类,分析功能纺织品的开发途径,主要阐述国内现代功能纺织品研究及开发进展,包括纳米光触媒多功能纺织品、防电磁辐射纺织品、超疏水多功能纺织品、阻燃纺织品、防蚊虫纺织品,并指出采用高新技术开发生态安全高附加值多功能纺织品是功能性纺织品的发展趋势.
介绍功能纺织品的分类,分析功能纺织品的开发途径,主要阐述国内现代功能纺织品研究及开发进展,包括纳米光触媒多功能纺织品、防电磁辐射纺织品、超疏水多功能纺织品、阻燃纺织品、防蚊虫纺织品,并指出采用高新技术开发生态安全高附加值多功能纺织品是功能性纺织品的发展趋势.
2017, 31(2): 126-130.
doi: 10.3969/j.issn.1009-444X.2017.02.007
摘要:
为满足读者的个性化需求,为其提供内容精准推送服务,有效提升期刊论文的传播与交流,设计了《计算机工程》内容精准推送系统.基于期刊采编系统的大量学者信息,利用语义分析及智能分词等技术,将读者—文章—标准关键词库进行匹配和过滤,为潜在读者主动推送相关论文摘要及下载链接.每期推送邮件约7 000封,发送成功率达99%,论文被下载次数较未运行该系统前明显增多,其中下载排名前列的均为已推送论文.科技期刊采用精准推送平台不仅可以为领域学者提供高效便捷的知识服务,也能够增强期刊论文的有效传播力度.
为满足读者的个性化需求,为其提供内容精准推送服务,有效提升期刊论文的传播与交流,设计了《计算机工程》内容精准推送系统.基于期刊采编系统的大量学者信息,利用语义分析及智能分词等技术,将读者—文章—标准关键词库进行匹配和过滤,为潜在读者主动推送相关论文摘要及下载链接.每期推送邮件约7 000封,发送成功率达99%,论文被下载次数较未运行该系统前明显增多,其中下载排名前列的均为已推送论文.科技期刊采用精准推送平台不仅可以为领域学者提供高效便捷的知识服务,也能够增强期刊论文的有效传播力度.
2017, 31(1): 90-94.
doi: 10.3969/j.issn.1009-444X.2017.01.019
摘要:
针对我国黄金期货价格预测问题,对影响我国黄金期货价格的5项指标进行灰色关联度分析,得出我国黄金期货价格与美国黄金期货价格之间的关联度最高.建立反向传播(BP)神经网络模型对我国黄金期货价格预测,并与GM(1,1)方法和ARIMA(0,2,1)模型下的预测结果进行对比.结果显示:与后两个模型相比,BP神经网络模型在黄金期货价格预测方面的精确性更高,具有较好的实用价值.
针对我国黄金期货价格预测问题,对影响我国黄金期货价格的5项指标进行灰色关联度分析,得出我国黄金期货价格与美国黄金期货价格之间的关联度最高.建立反向传播(BP)神经网络模型对我国黄金期货价格预测,并与GM(1,1)方法和ARIMA(0,2,1)模型下的预测结果进行对比.结果显示:与后两个模型相比,BP神经网络模型在黄金期货价格预测方面的精确性更高,具有较好的实用价值.
2003, 17(2): 83-86.
doi: 10.3969/j.issn.1009-444X.2003.02.001
Abstract:
2019, 33(3): 283-284,288.
doi: 10.3969/j.issn.1009-444X.2019.03.017
Abstract:
About Journal
More>
Chinese Quarterly
Supervisor: Shanghai Municipal Education Commission
Sponsors by: Shanghai University of Engineering Science
Publisher: Editorial Department of Journal of Shanghai University of Engineering Science
Editor-in-Chief: WANG Yansong
Email: xuebao@sues.edu.cn
ISSN1009-444X
CN31-1598/T
Link
More>

 Email Alert
Email Alert
 RSS
RSS
