| Citation: | CAO Feng, CHEN Saixuan, CUI Guohua, ZHANG Yu, ZHAO Wanbo. Topology structure design and optimization of a new-type strain torque sensor for robotic joints[J]. Journal of Shanghai University of Engineering Science, 2025, 39(1): 15-20, 72. doi: 10.12299/jsues.23-0250

|

| [1] |
HADDADIN S, ELIZABETH C. Physical human–robot interaction[J] . Springer Handbook of Robotics,2016,1(2):1835 − 1874.
|
| [2] |
De STEFANO M.Multi-rate tracking control for a space robot on a controlled satellite: a passivity-based strategy[J] . IEEE Robotics and Automation Letters,2019,4(2):1319 − 1326. doi: 10.1109/LRA.2019.2895420
|
| [3] |
LEE S D, SONG J B. Sensorless collision detection based on friction model for a robot manipulator[J] . International Journal of Precision Engineering and Manufacturing,2016(17):11 − 17.
|
| [4] |
王梦含. 基于六维力传感器的机器人力控研究[D] . 太原: 太原理工大学, 2023.
|
| [5] |
OTT C, MUKHERJEE R, Nakamura Y. Unified impedance and admittance control[C] //Proceedings of 2010 IEEE International Conference on Robotics and Automation. Anchorage: IEEE, 2010: 554 − 561.
|
| [6] |
MADNI A M, VUONG J B, Yang D C H. A differential capacitive torque sensor with optimal kinematic linearity[J] . IEEE Sensors Journal,2007(5):800−807. doi: 10.1109/JSEN.2007.894134
|
| [7] |
LIU J, LI M, QIN L, et al.Active design method for the static characteristics of a piezoelectric six-axis force/torque sensor[J] . Sensors,2014,14:659 − 671. doi: 10.3390/s140100659
|
| [8] |
TSETSERUKOU D, KAWAKAMI N, TACHI S. Design, control and evaluation of a whole-sensitive robot arm for physical human-robot interaction[J] . International Journal of Humanoid Robotics,2009,6:699 − 725. doi: 10.1142/S0219843609001899
|
| [9] |
KANG M K, LE S, KIM J H. Shape optimization of a mechanically decoupled six-axis force/torque sensor[J] . Sensors and Actuators A: Physical,2014,209:41 − 51.
|
| [10] |
朱弟发, 张恩阳, 韩康, 等. 基于协作机器人关节集成扭矩传感器的研究[J] . 仪表技术与传感器,2021,1(10):6 − 9. doi: 10.3969/j.issn.1002-1841.2021.10.002
|
| [11] |
魏家豪. 面向机器人碰撞检测的关节力矩传感器设计与开发[D] . 哈尔滨: 哈尔滨工业大学, 2019.
|
| [12] |
LOU Y J, WEI J H, SONG S. Design and optimization of a joint torque sensor for robot collision detection[J] . IEEE Sensors Journal,2019,19(16):618 − 662.
|
| [13] |
KIM U, MAENG C Y, BAK G, et al. High-stiffness torque sensor with a strain amplification mechanism for cooperative industrial manipulators[J] . IEEE Transactions on Industrial Electronics,2021,3(1):3131 − 3141.
|
| [14] |
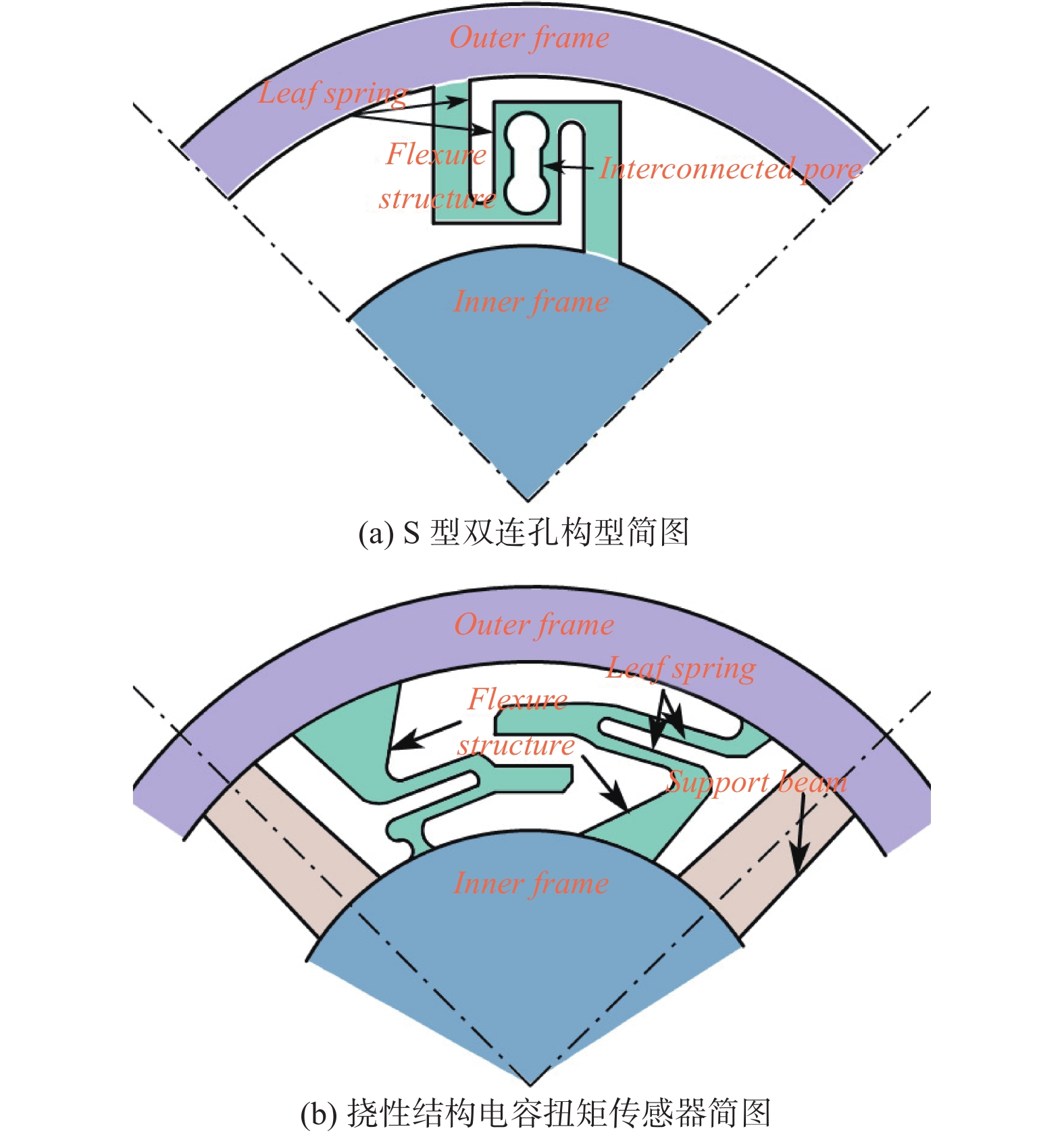
KIM J I, JEON H S, JEONG Y J, et al. High stiffness capacitive type torque sensor with flexure structure for cooperative industrial robots[C] //Proceedings of 2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI). Jeju: IEEE, 2017: 433 − 437.
|
Figures(11) / Tables(4)
Copyright © Journal of Shanghai University of Engineering Science沪ICP备05052046号
Tel:86-21-67791000 Email:xuebao@sues.edu.cn
Address:333 Longteng Road, Shanghai, China China Pos:201620
Supported by:
Beijing Renhe Information Technology Co. Ltd




 DownLoad:
DownLoad: