| Citation: | SONG Jiqiang, ZHANG Aihua, YANG Lingyao. Trajectory tracking control of micro positioning platform based on dynamic sliding mode[J]. Journal of Shanghai University of Engineering Science, 2022, 36(3): 261-266. doi: 10.12299/jsues.21-0193

|
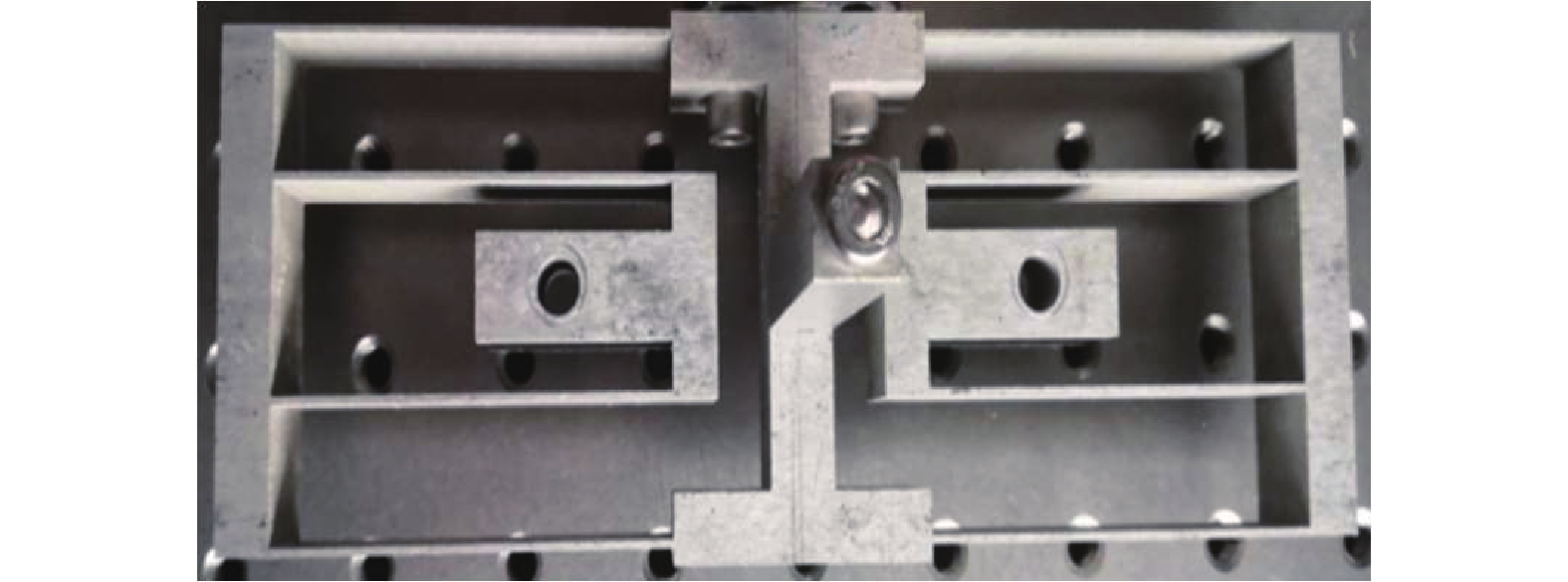
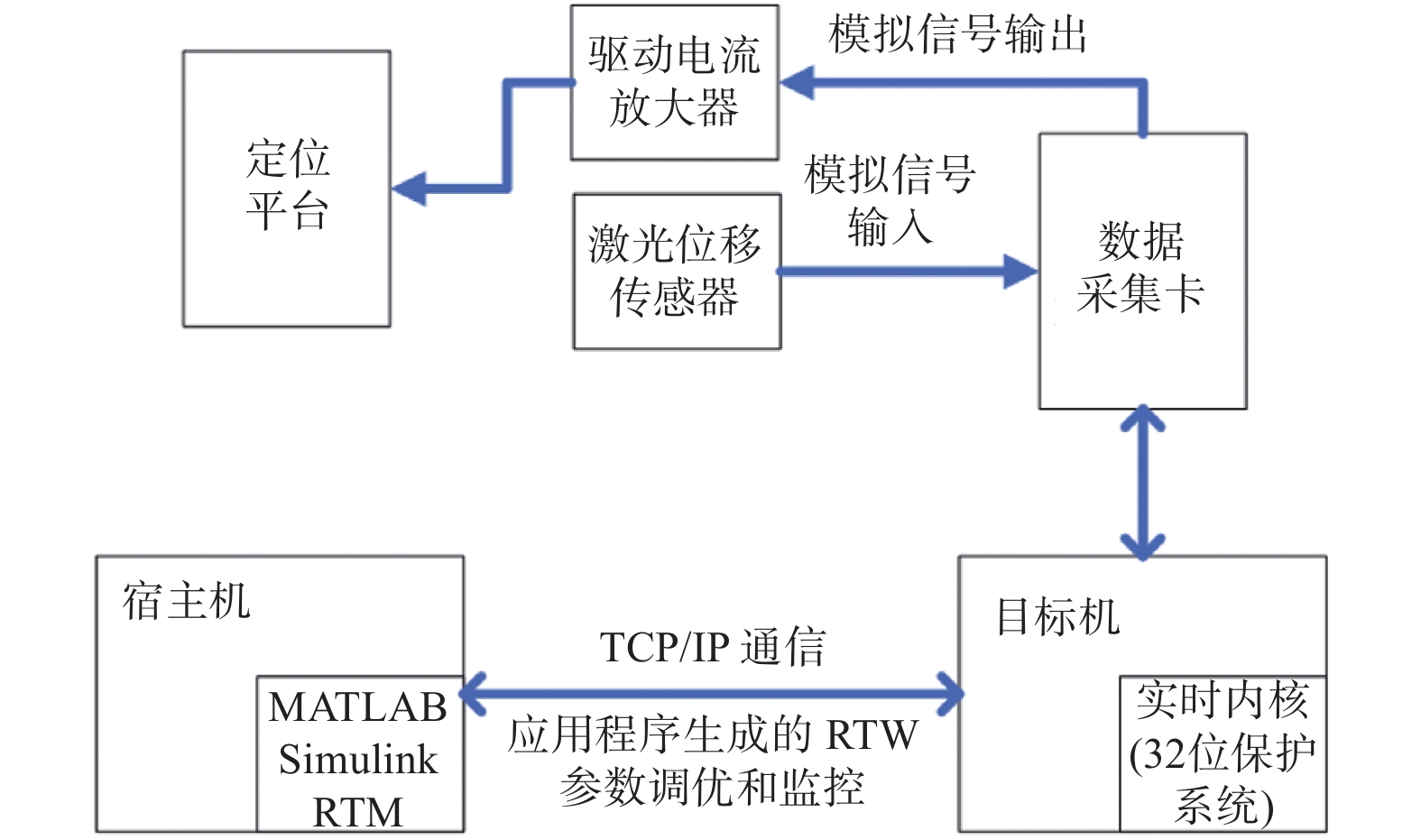
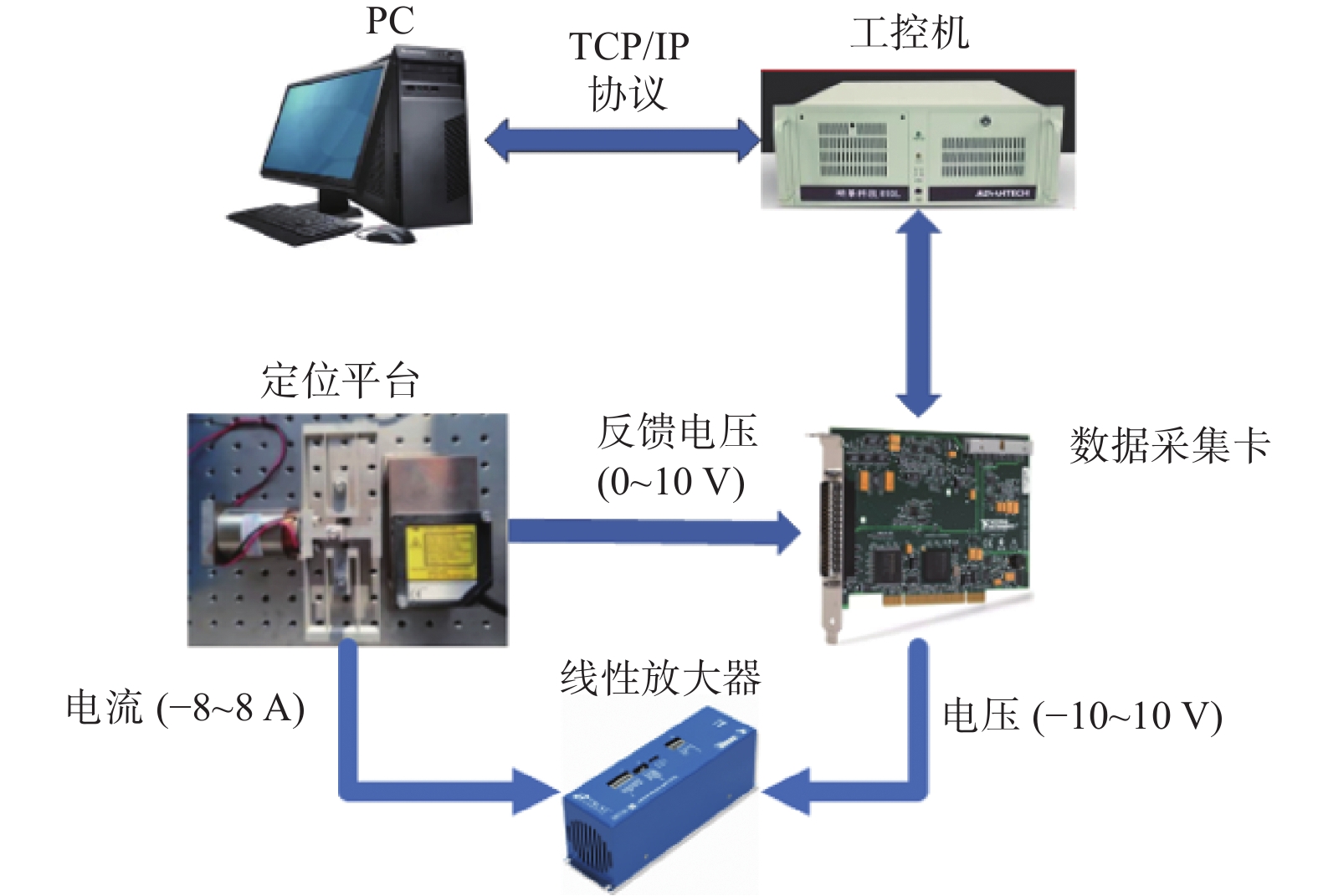
As a high-precision motion platform, the micro positioning platform driven by the voice coil motor is widely used in precision machining, micro-electromechanical and other fields. Aiming at the high-precision and stable tracking control problem of the micro positioning platform driven by the voice coil motor, combining normalization method with theoretical modeling parameters, a mathematical model of second-order differential equation with parameter uncertainties was established, and the actual displacement of the flexible mechanism was taken as input and the platform control rate was taken as output. In view of the uncertain characteristics of the model parameters, the second-order sliding mode surface of the error was established to propose tracking control of micro positioning platform based on dynamic sliding mode, and the conclusion of system stability through Lyapunov's stability theory was obtained. The proposed control algorithm was analyzed by platform test comparison, the results show that the proposed dynamic sliding mode control algorithm can complete the trajectory tracking with less chatter. The tracking accuracy of the algorithm has improved by 13.4% and 4% compared to traditional sliding mode control, which has a smoother tracking and a good engineering prospects.

| [1] |
WU Z Y, XU Q S. Design, optimization and testing of a compact XY parallel nanopositioning stage with stacked structure[J] . Mechanism & Machine Theory,2018,126:171 − 188.
|
| [2] |
田延岭, 包亚洲, 王福军, 等. 音圈电机驱动的柔性定位平台设计与控制[J] . 天津大学学报(自然科学与工程技术版),2017,50(10):1070 − 1076.
|
| [3] |
柴嘉伟, 贵献国. 音圈电机结构优化及应用综述[J] . 电工技术学报,2021,36(6):1113 − 1125.
|
| [4] |
余江. 压电驱动微定位平台的控制及评价研究[D]. 重庆: 重庆大学, 2019.
|
| [5] |
潘炜. 压电驱动微定位平台迟滞动态建模与控制方法研究[D]. 长春: 吉林大学, 2020.
|
| [6] |
周淼磊, 张敬爱, 赵宇, 等. 压电微定位平台神经网络与专家模糊复合控制方法[J] . 控制与决策,2018,33(1):95 − 100.
|
| [7] |
高为炳. 变结构控制理论基础[M]. 北京: 中国科学技术出版社, 1990.
|
| [8] |
刘金琨. 滑模变结构控制Matlab仿真[M]. 北京: 清华大学出版社, 2012.
|
| [9] |
蓝益鹏, 王靖腾, 刘欣. 可控励磁直线同步电动机的全局积分Terminal滑模控制[J] . 控制理论与应用,2019,36(6):931 − 938. doi: 10.7641/CTA.2018.80198
|
| [10] |
张瑶, 马广富, 郭延宁, 等. 一种多幂次滑模趋近律设计与分析[J] . 自动化学报,2016,42(3):466 − 472.
|
| [11] |
田福庆, 姜尚, 梁伟阁. 含齿隙弹载舵机的全局反步模糊自适应控制[J] . 自动化学报,2019,45(6):1177 − 1185.
|
| [12] |
许叙遥, 林辉. 基于动态滑模控制的永磁同步电机位置速度一体化设计[J] . 电工技术学报,2014,29(5):77 − 83. doi: 10.3969/j.issn.1000-6753.2014.05.011
|
| [13] |
朱庆华, 董瑞琦, 马广富. 基于动态滑模控制的挠性航天器姿态控制[J] . 控制理论与应用,2018,35(10):1430 − 1435. doi: 10.7641/CTA.2018.70863
|
| [14] |
何雄, 张农, 孔国玲. 基于动态滑模算法的AMT选换挡电机控制[J] . 中国机械工程,2016,27(10):1414 − 1419. doi: 10.3969/j.issn.1004-132X.2016.10.023
|
Figures(7) / Tables(1)
Copyright © Journal of Shanghai University of Engineering Science沪ICP备05052046号
Tel:86-21-67791000 Email:xuebao@sues.edu.cn
Address:333 Longteng Road, Shanghai, China China Pos:201620
Supported by:
Beijing Renhe Information Technology Co. Ltd




 DownLoad:
DownLoad: