| Citation: | SUN Zhiwei, LI Cong. Research on trajectory tracking control based on radial basis neural network PID and model predictive control[J]. Journal of Shanghai University of Engineering Science, 2022, 36(2): 148-158. doi: 10.12299/jsues.21-0293

|
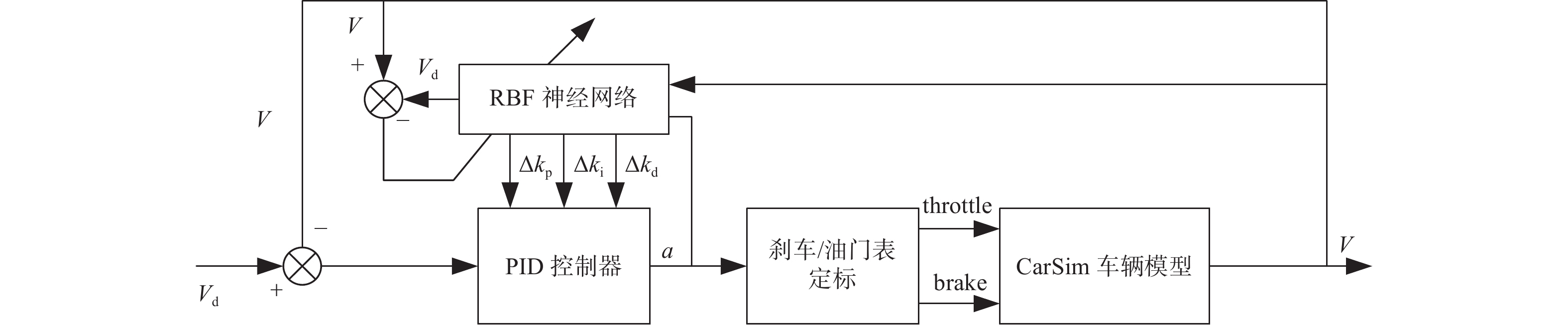
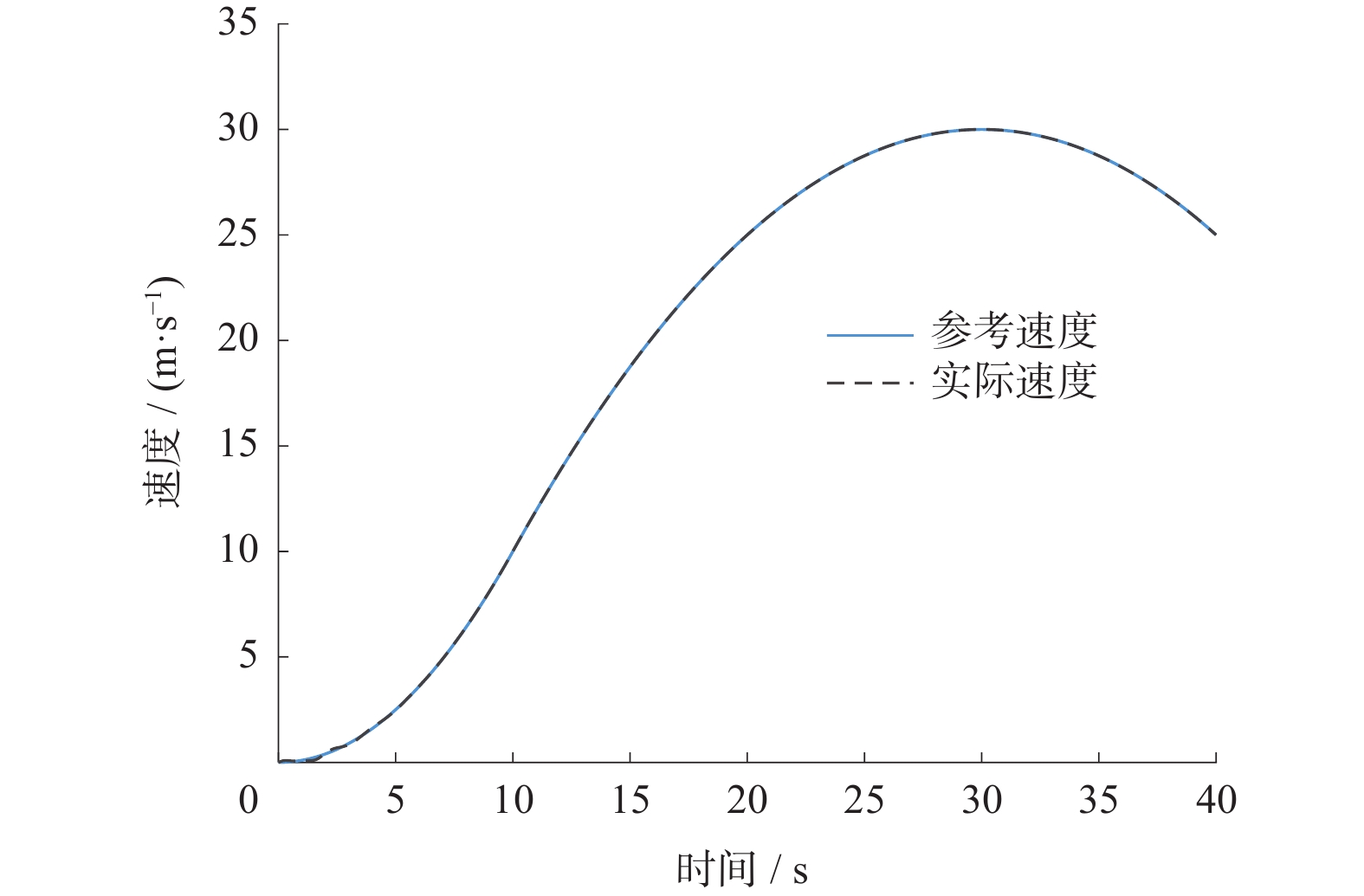
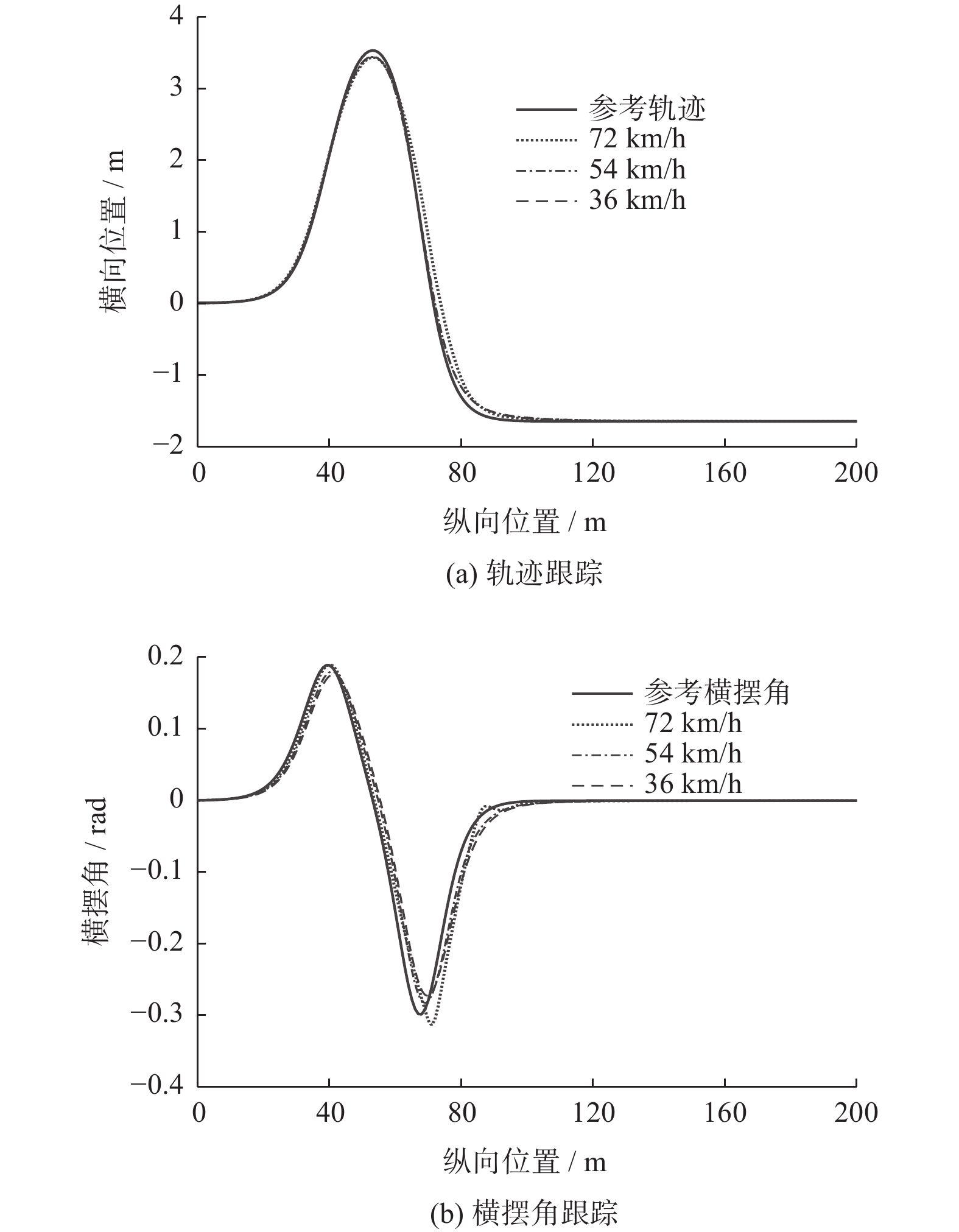
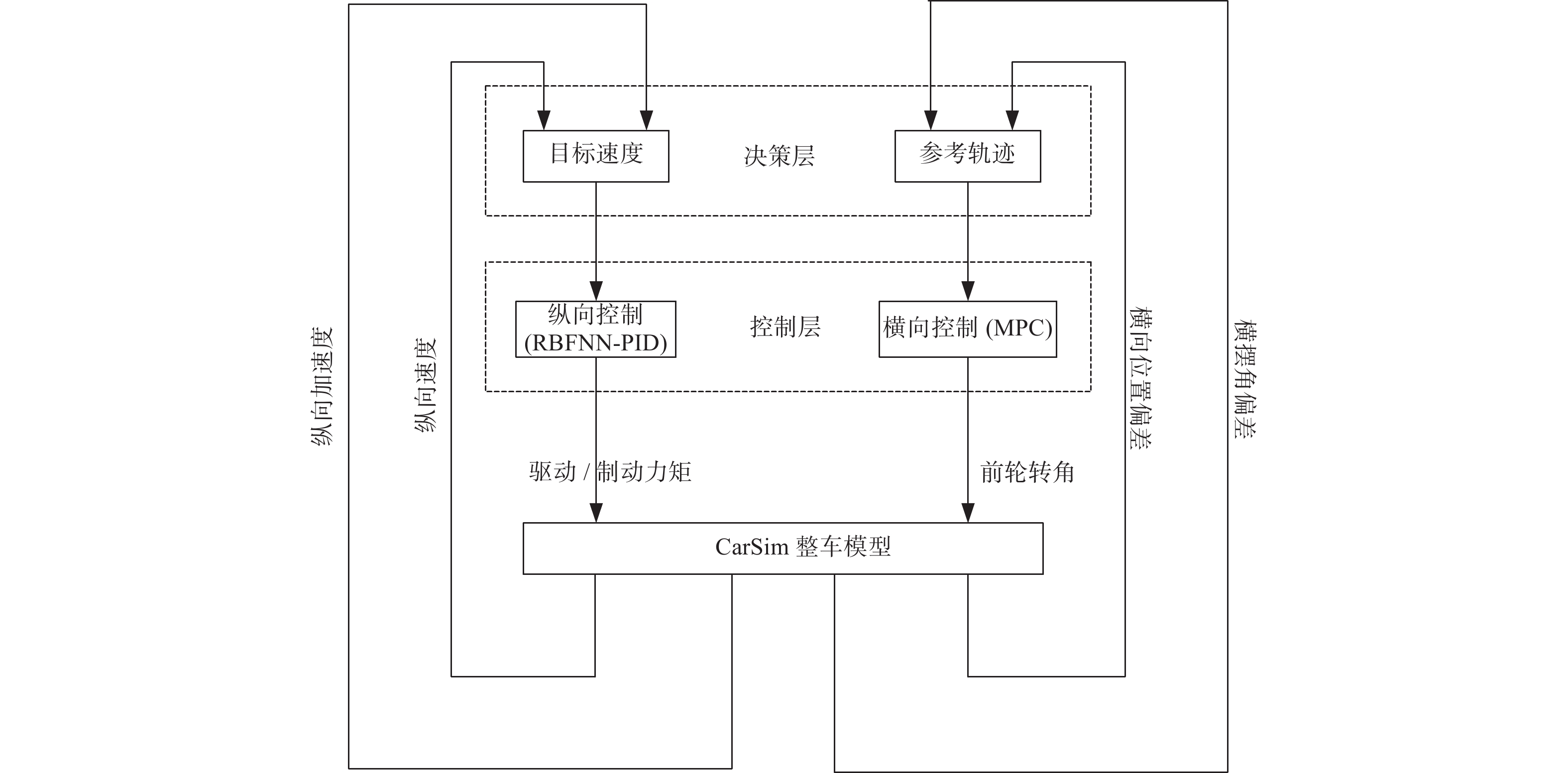
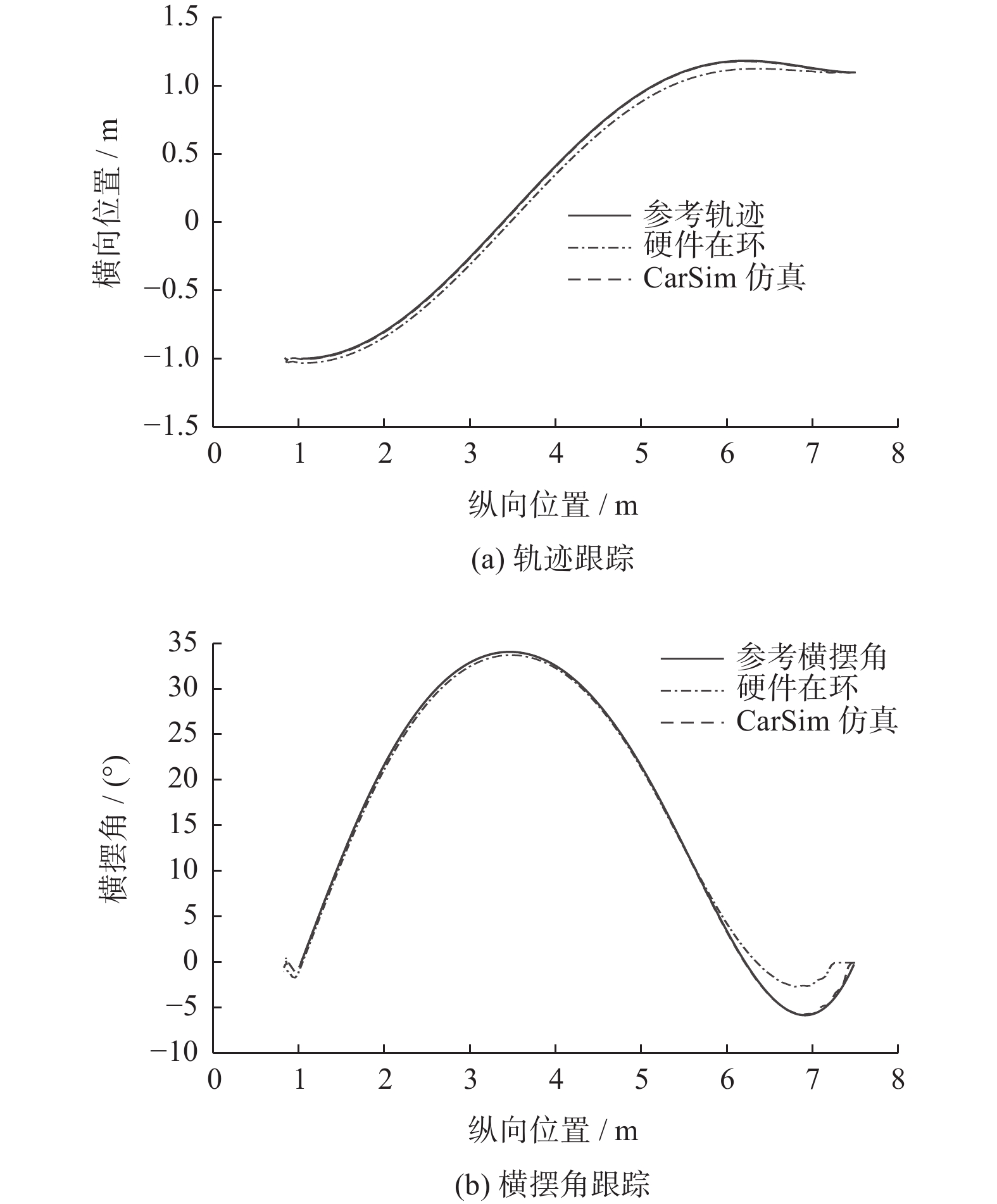
In order to improve the stability and robustness of self-driving vehicle, a trajectory tracking control method was proposed based on the combination of self-adaptive proportional integral derivative (PID) of radial basis function neural network (RBFNN−PID) and model predictive control (MPC). A simulation model of intelligent vehicle longitudinal speed control and lateral control was established based on self-adaptive RBFNN−PID algorithm, MPC algorithm and vehicle dynamics model. Based on that, the lateral MPC and LQR−PID control algorithm were used as benchmarks to demonstrate the superiority of the presented control method in trajectory tracking. The simulation results show that the presented control method has higher accuracy than the comparing group. Finally, the hardware-in-the-loop verification of the proposed control method is carried out. The results show that the proposed trajectory tracking control algorithm is effective and advanced in trajectory tracking accuracy and stability.

| [1] |
BADUE C, GUIDOLINI R, CARNEIRO R V, et al. Self-driving cars: A survey[J] . Expert Systems with Applications,2020:113816.
|
| [2] |
陈慧岩, 熊光明, 龚建伟. 无人驾驶汽车概论[M]. 北京: 北京理工大学出版社, 2014.
|
| [3] |
AGRIESTI S, BREVI F, GANDINI P, et al. Impact of driverless vehicles on urban environment and future mobility[J] . Transportation Research Procedia,2020,49:44 − 59. doi: 10.1016/j.trpro.2020.09.005
|
| [4] |
张琨. 智能汽车自主循迹控制策略研究[D]. 哈尔滨: 哈尔滨工业大学, 2013.
|
| [5] |
聂枝根, 王万琼, 赵伟强, 等. 基于轨迹预瞄的智能汽车变道动态轨迹规划与跟踪控制[J] . 交通运输工程学报,2020,20(2):147 − 160.
|
| [6] |
姜岩, 龚建伟, 熊光明, 等. 基于运动微分约束的无人车辆纵横向协同规划算法的研究[J] . 自动化学报,2013,39(12):2012 − 2020.
|
| [7] |
罗鹰, 冒兴蜂. 智能汽车换道避障路径规划与跟踪控制研究[J] . 机械设计与制造,2019(7):139 − 143. doi: 10.3969/j.issn.1001-3997.2019.07.035
|
| [8] |
龚建伟, 姜岩, 徐威. 无人驾驶车辆模型预测控制[M]. 北京: 北京理工大学出版社, 2014.
|
| [9] |
陈虹. 模型预测控制[M]. 北京: 科学出版社, 2013.
|
| [10] |
ALCALA E, PUIG V, QUEVEDO J. LPV-MPC control for autonomous vehicles[J] . IFAC-PapersOnLine,2019,52(28):106 − 113. doi: 10.1016/j.ifacol.2019.12.356
|
| [11] |
BAO C J, FENG J W, WU J, et al. Model predictive control of steering torque in shared driving of autonomous vehicles[J] . Science Progress,2020,103(3):1 − 22.
|
| [12] |
PAUCA O, CARUNTU C F, LAZAR C. Predictive control for the lateral and longitudinal dynamics in automated vehicles[C]//2019 23rd International Conference on System Theory, Control and Computing (ICSTCC). Sinaia: IEEE, 2019: 797-802.
|
| [13] |
张正华. 基于神经网络的无人驾驶车辆轨迹跟踪控制[D]. 秦皇岛: 燕山大学, 2019.
|
| [14] |
肖宗鑫, 李晓杰, 肖宗烁, 等. 基于RBF神经网络优化的无人驾驶车辆增量线性模型预测轨迹跟踪控制研究[J] . 重庆理工大学学报(自然科学),2021,35(3):36 − 45.
|
Figures(12) / Tables(4)
Copyright © Journal of Shanghai University of Engineering Science沪ICP备05052046号
Tel:86-21-67791000 Email:xuebao@sues.edu.cn
Address:333 Longteng Road, Shanghai, China China Pos:201620
Supported by:
Beijing Renhe Information Technology Co. Ltd




 DownLoad:
DownLoad: