| Citation: | ZHAO Yiheng, ZHOU Zhifeng. Location and mapping of lidar and vision sensor fusion[J]. Journal of Shanghai University of Engineering Science, 2022, 36(4): 392-397. doi: 10.12299/jsues.22-0121

|
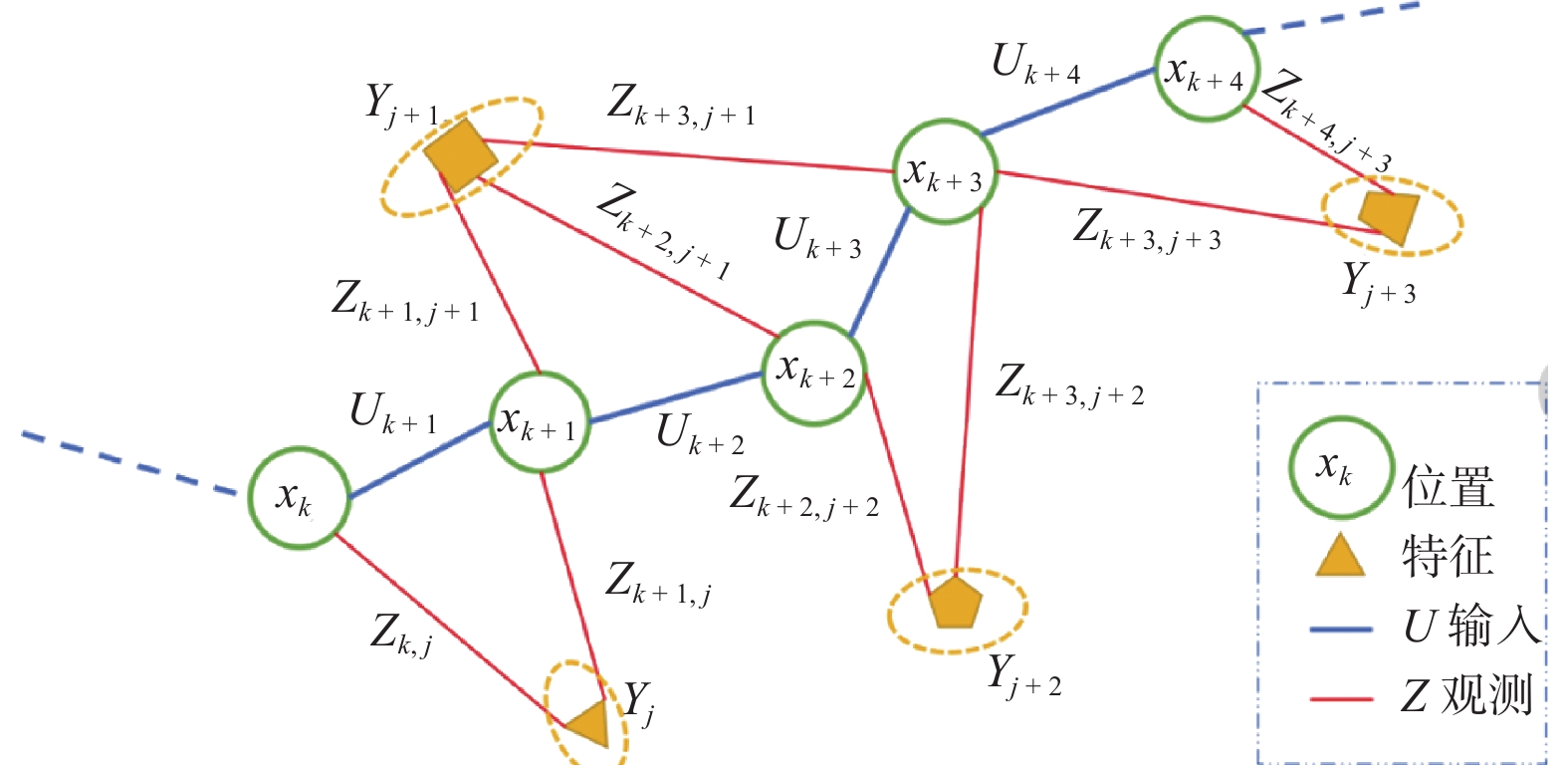
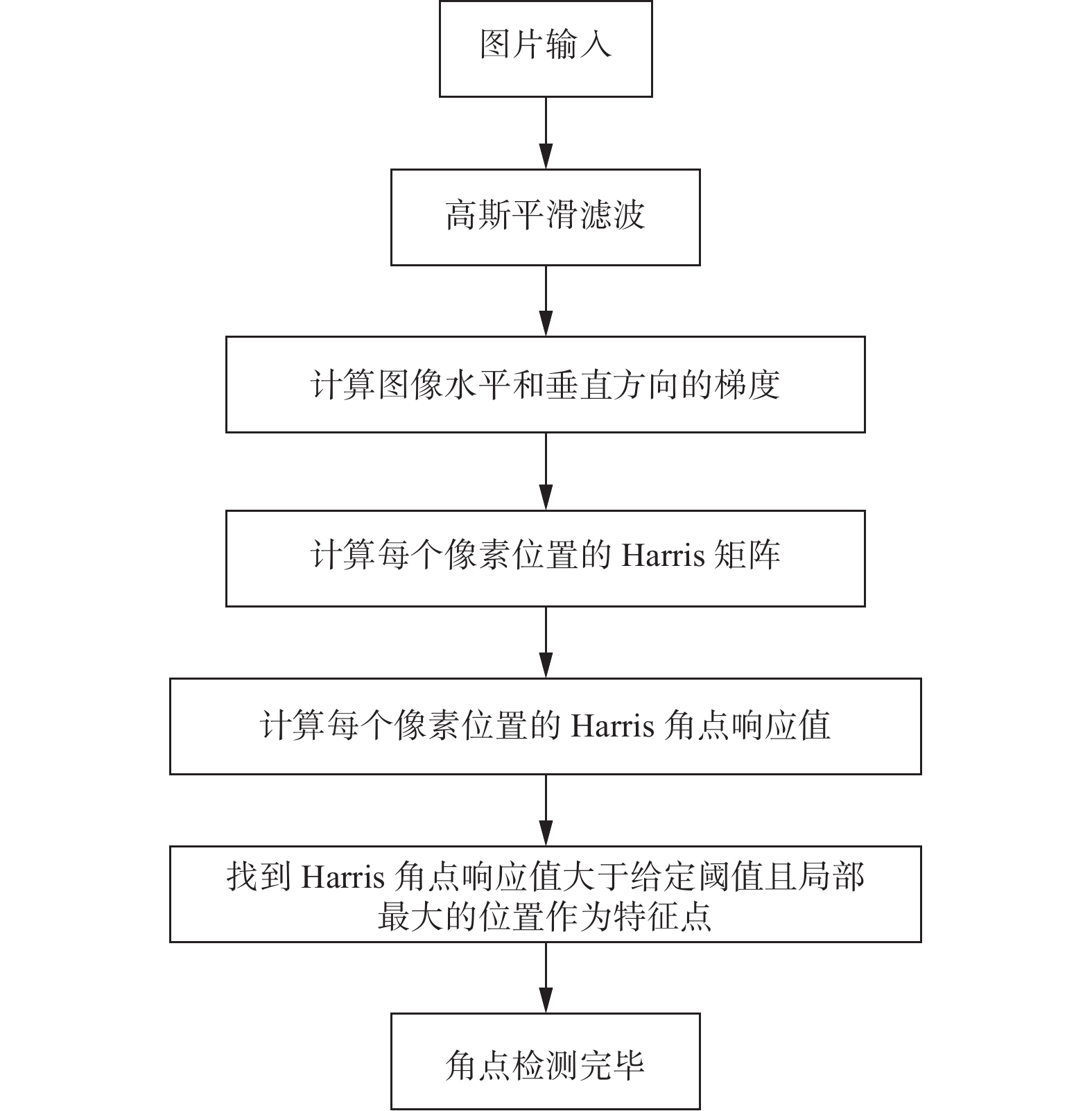
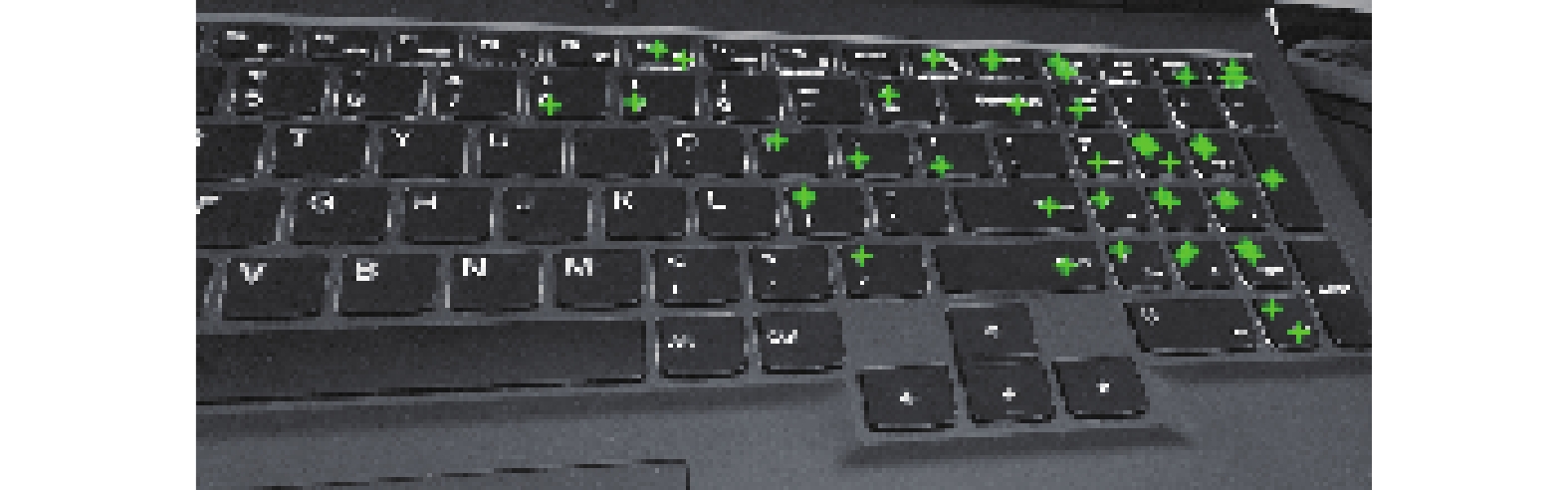
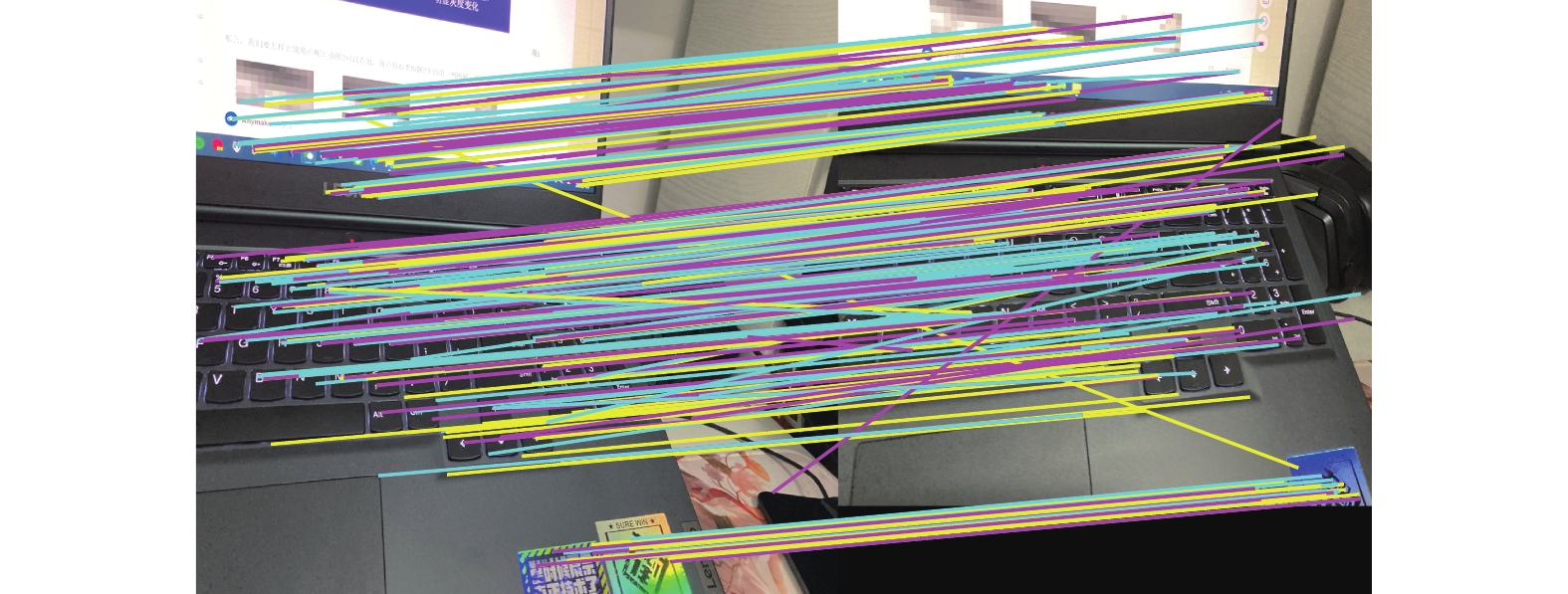
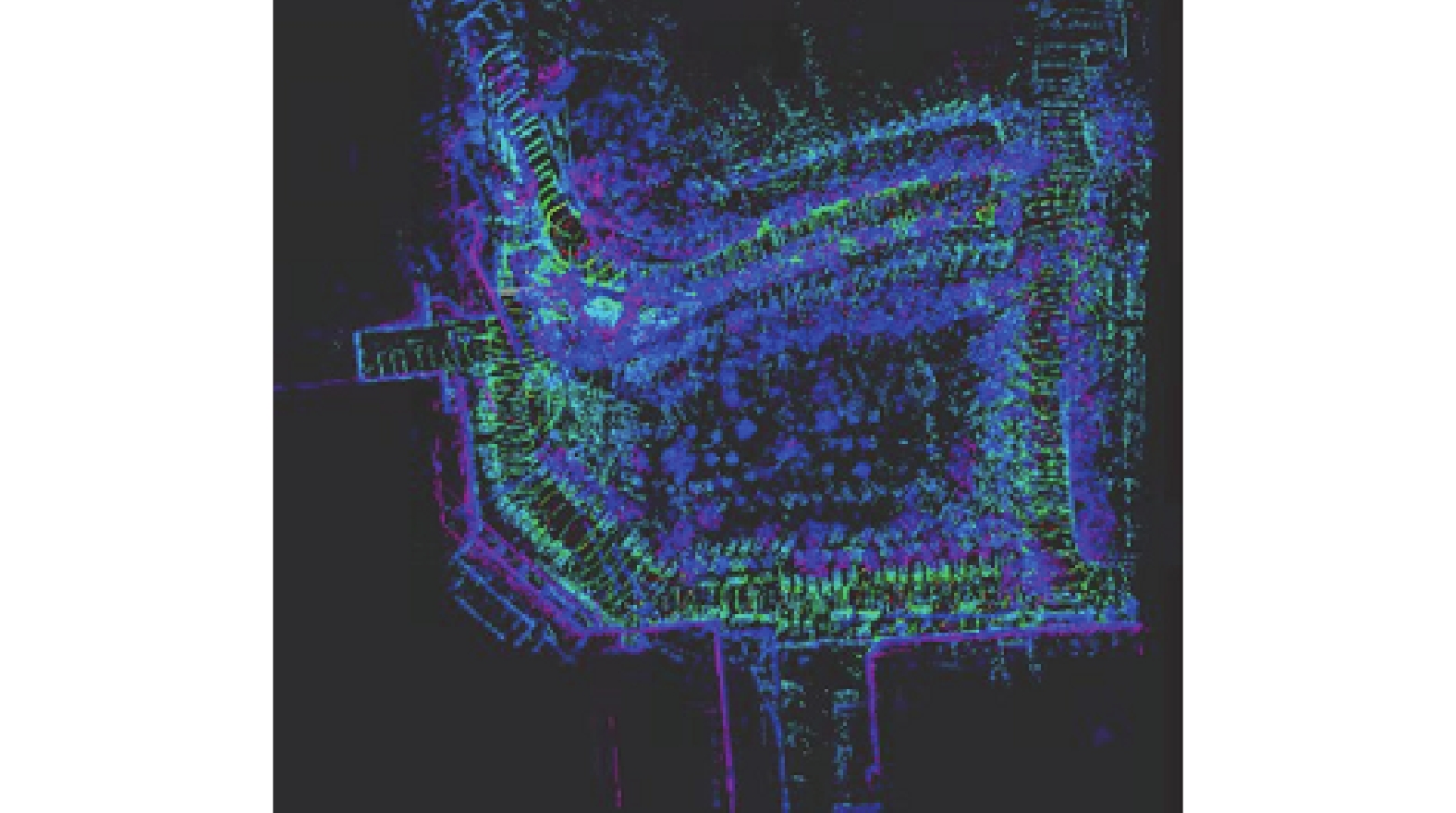
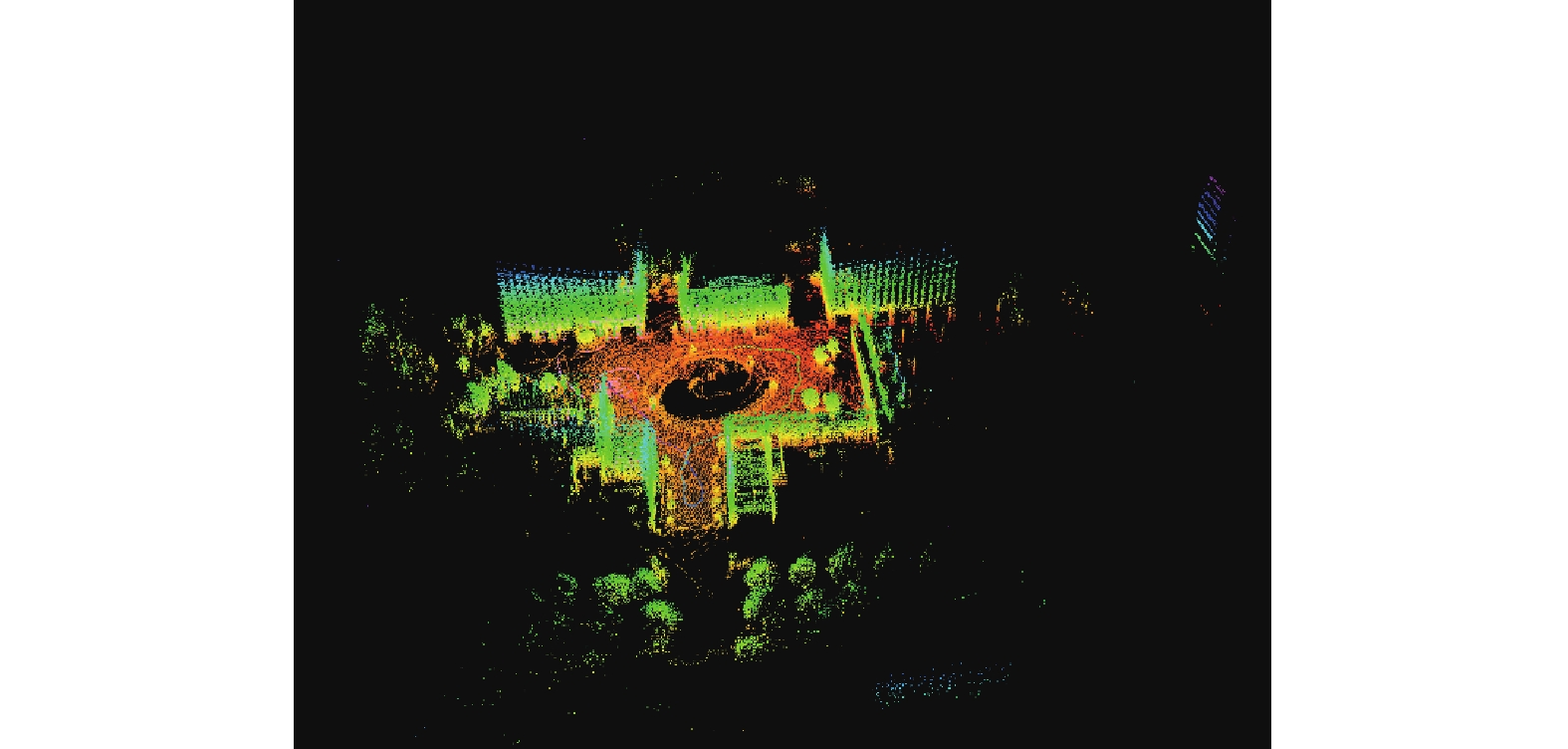
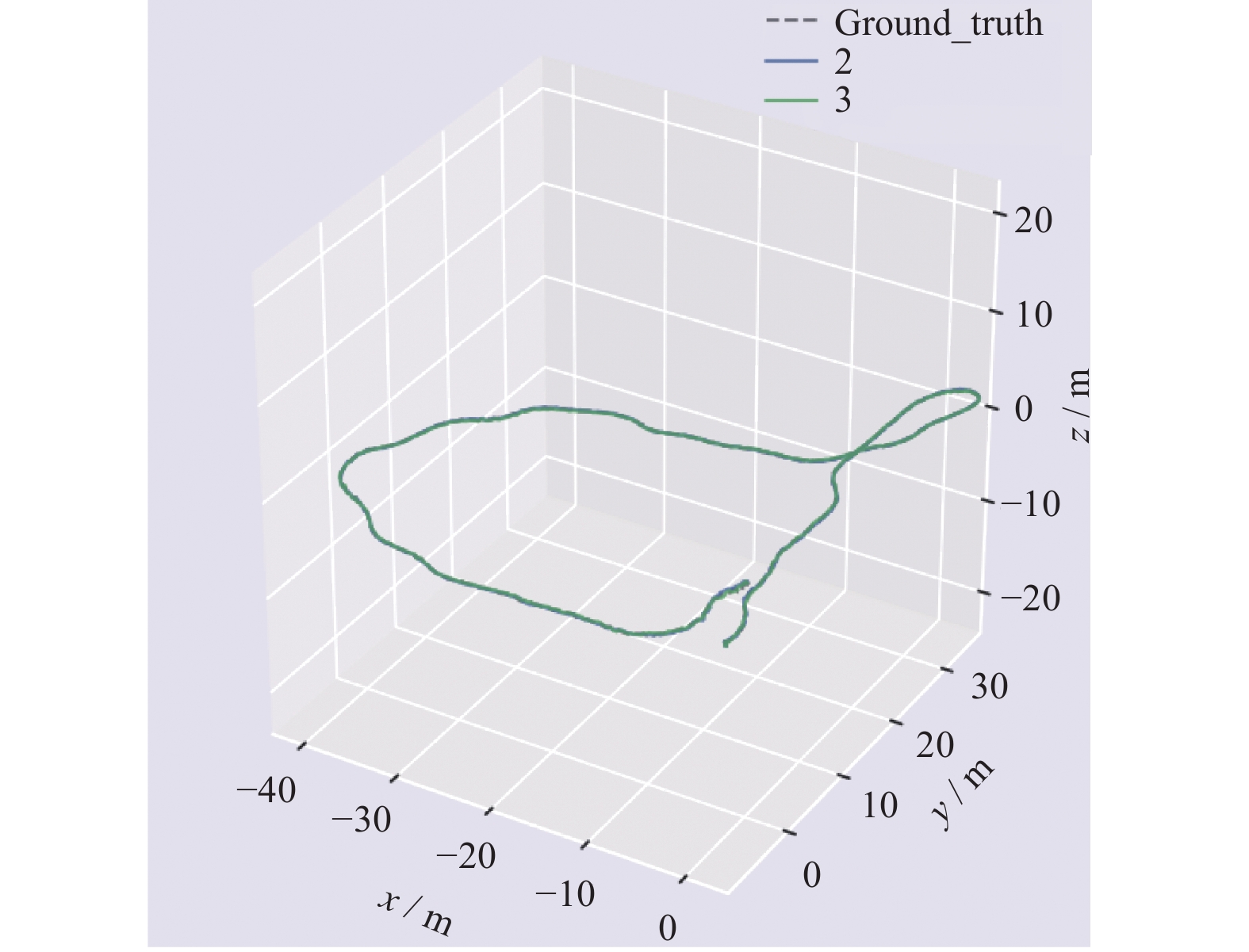
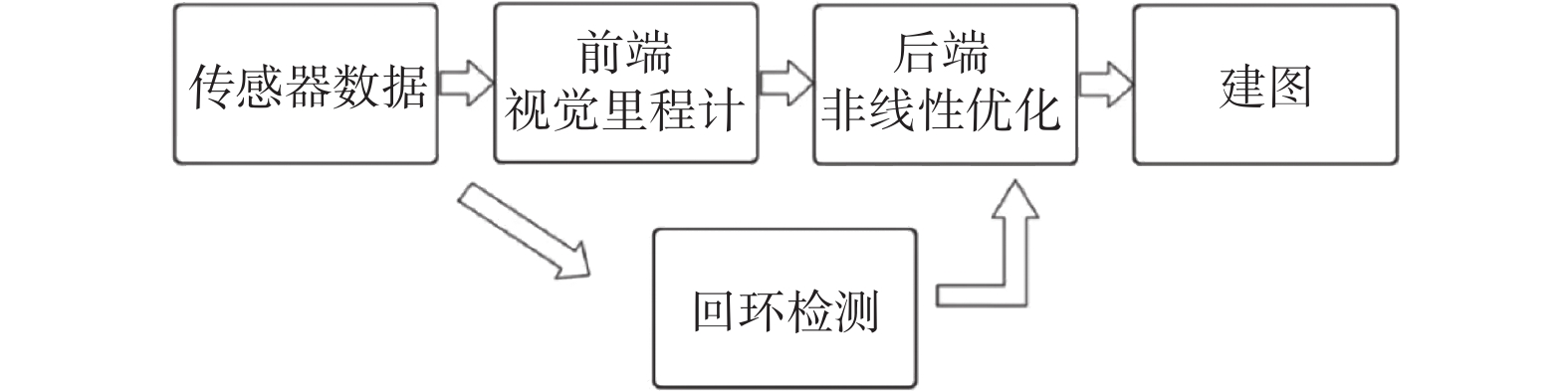
Location and mapping is one of the key technologies for autonomous driving. With limitations of lidar sensors or vision sensors, the advantages of different sensors can be brought into play through multi-sensor fusion and the accuracy and robustness of location and mapping can be improved. The Harris algorithm was optimized for corner extraction, the key frame was used to optimize the feature point matching algorithm, and then the nonlinear least square method was used for back-end optimization. The location and mapping experiments were carried out on the test platform to verify the algorithm, and the positioning error was analyzed with the EVO tool. The result shows that the error of the proposed back-end optimization algorithm is 13% less than that of a single sensor.

| [1] |
GRAETER J, WILCZYNSKI A, LAUER M. LIMO: Lidar-Monocular Visual Odometry[C]//Proceedings of IEEE, 2019: 7872 − 7879.
|
| [2] |
SHIN Y S, PARK Y S, KIM A. Direct visual SLAM using sparse depth for camera-lidar system[C]//Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA). Brisbane: IEEE, 2018: 1−8.
|
| [3] |
HUANG S S, MA Z Y, MU T, et al. Lidar-monocular visual odometry using point and line features[C]//Proceedings of 2020 IEEE International Conference on Robotics and Automation (ICRA). Paris: IEEE, 2020: 33−42.
|
| [4] |
SILVA V D, ROCHE J, KONDOZ A. Fusion of LiDAR and camera sensor data for environment sensing in driverless vehicles[J] . arXiv,2017. doi: 10.48550/arXiv.1710.06230
|
| [5] |
ZUO X X, GENEVA P, YANG Y L, et al. Visual-inertial localization with prior LiDAR map constraints[J] . IEEE Robotics and Automation Letters,2019,4(4):3394 − 3401.
|
| [6] |
JI Z, SINGH S. Visual-lidar odometry and mapping: low-drift, robust, and fast[C]//Proceedings of 2015 IEEE International Conference on Robotics and Automation (ICRA). Seattle: IEEE, 2015: 345−351.
|
| [7] |
ZHANG J, SINGH S. Laser-visual-inertial odometry and mapping with high robustness and low drift[J] . Journal of Field Robotics,2018,35(8):1242 − 1264. doi: 10.1002/rob.21809
|
| [8] |
SHAO W Z, VIJAYARANGAN S, LI C, et al. Stereo visual inertial LiDAR simultaneous localization and mapping[C]//Proceedings of 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems. Macau: IEEE, 2019: 370−377.
|
| [9] |
ZUO X, GENEVA P, LEE W, et al. LIC-fusion: LiDAR-inertial-camera odometry[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Kyongju: IEEE, 2019: 1−4.
|
| [10] |
张伟伟, 陈超, 徐军. 融合激光与视觉点云信息的定位与建图方法[J] . 计算机应用与软件,2020,37(7):114−119.
|
Figures(13) / Tables(1)
Copyright © Journal of Shanghai University of Engineering Science沪ICP备05052046号
Tel:86-21-67791000 Email:xuebao@sues.edu.cn
Address:333 Longteng Road, Shanghai, China China Pos:201620
Supported by:
Beijing Renhe Information Technology Co. Ltd




 DownLoad:
DownLoad: