| Citation: | LU Hongli, MAO Jian, YAN Juan, LI Peixing. Research on mechanism and capability of new type of wall-climbing robot overconming obstacles[J]. Journal of Shanghai University of Engineering Science, 2021, 35(2): 163-170.

|

| [1] |
MANUEL A,PABLO GONZALEZ D S,MARIA A, et al. Application of CLAWAR machines[J] . The International Journal of Robotics Research,2003,22(3−4):251 − 264.
|
| [2] |
SORIOKA Y, YAMAGUCHI T, HASHIMOTO S. 1302 Title development of a telescopic- arm type, climbing support robot[J] . 2008,2008:79 − 83.
|
| [3] |
刘淑霞, 王炎, 徐殿国, 等. 爬壁机器人技术的应用[J] . 机器人,1999(2):148 − 155.
|
| [4] |
汪家斌, 李丽荣, 陈咏华, 等. 壁面移动机器人吸附方式的研究现状与发展[J] . 机械,2012(1):1 − 5.
|
| [5] |
刘京诚. 微小步行爬壁机器人驱动与位置检测技术及系统[D]. 重庆: 重庆大学, 2003.
|
| [6] |
刘彦伟, 黄响, 王李梦, 等. 仿生爪刺式双足爬壁机器人设计与分析[J] . 机械科学与技术,2019,38(8):1185 − 1190.
|
| [7] |
董寒, 崔登祺, 李方兴, 等. 多吸盘框架式爬壁机器人系统的设计与分析[J] . 制造业自动化,2016,38(6):59 − 63,69. doi: 10.3969/j.issn.1009-0134.2016.06.015
|
| [8] |
付宜利, 李志海. 爬壁机器人的研究进展[J] . 机械设计,2008(4):1 − 5.
|
| [9] |
刘松国. 六自由度串联机器人运动优化与轨迹跟踪控制研究[D]. 杭州: 浙江大学, 2009.
|
| [10] |
孟广耀, 王振华, 黄居鑫, 等. 双摆臂履带可变形机器人结构设计与越障性能研究[J] . 机械传动,2019,43(8):144 − 149.
|
| [11] |
徐正飞, 杨汝清, 王韬. 关节式移动机器人的越障运动[J] . 中国机械工程,2003,14(12):69 − 72,6.
|
| [12] |
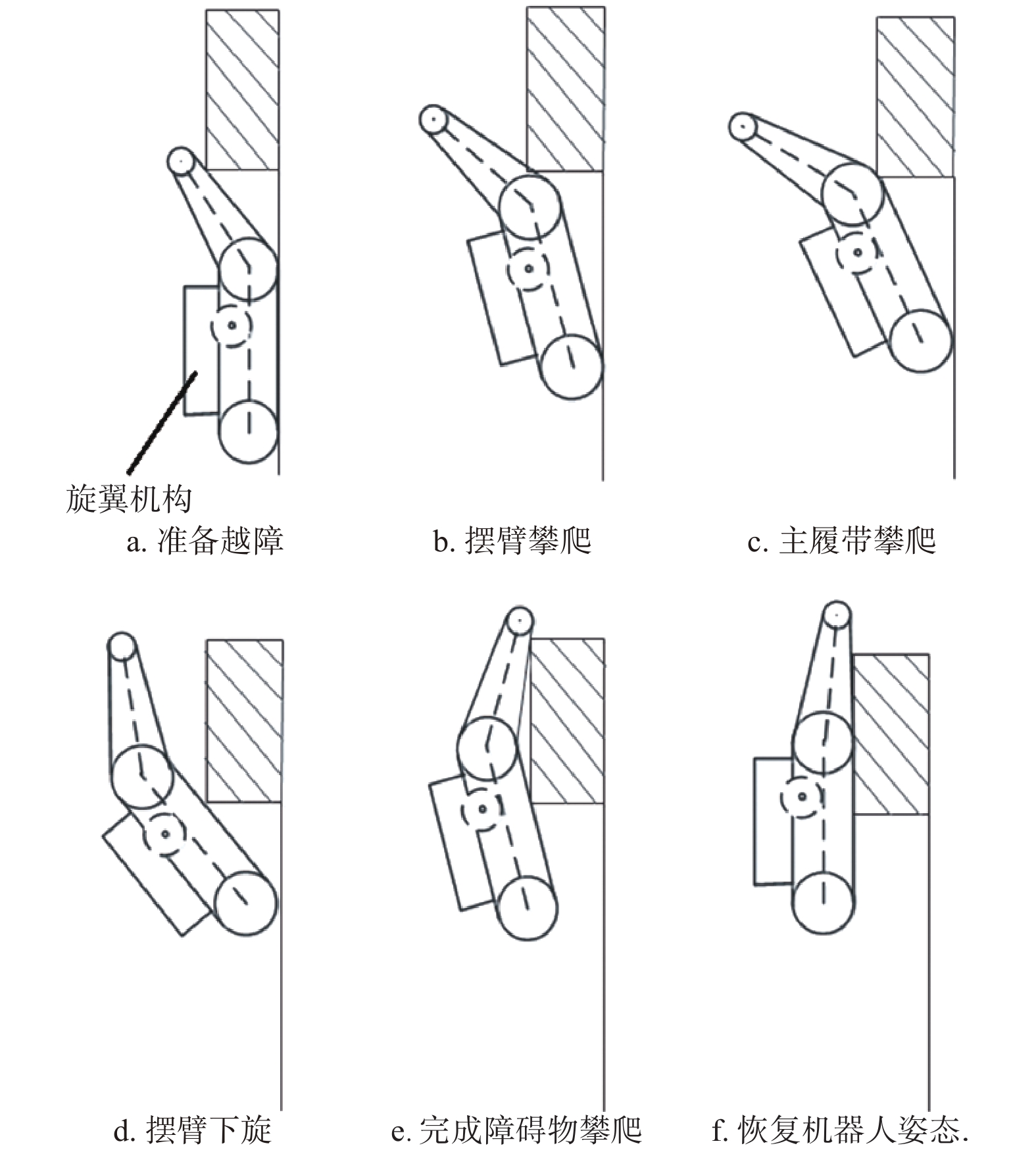
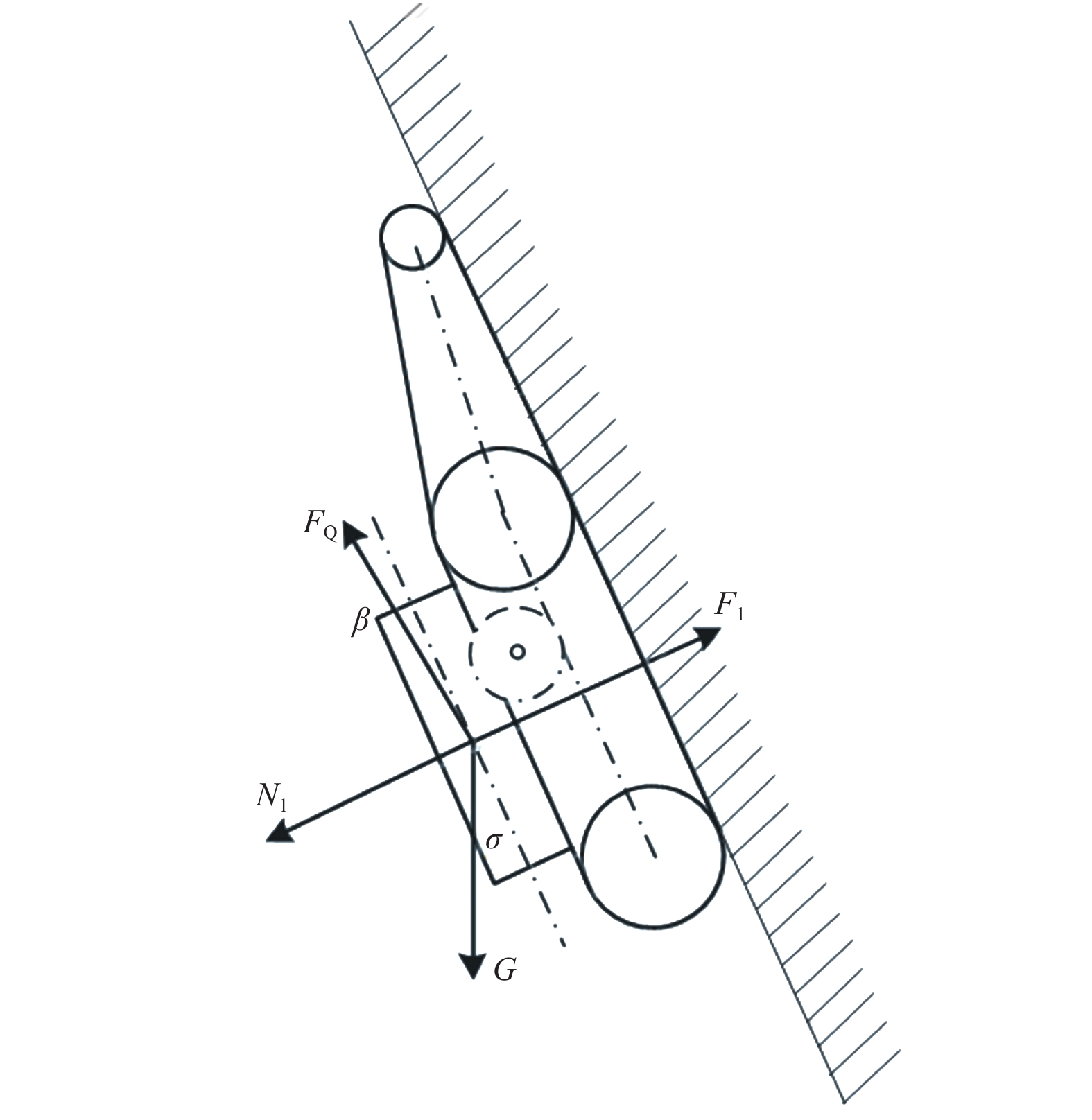
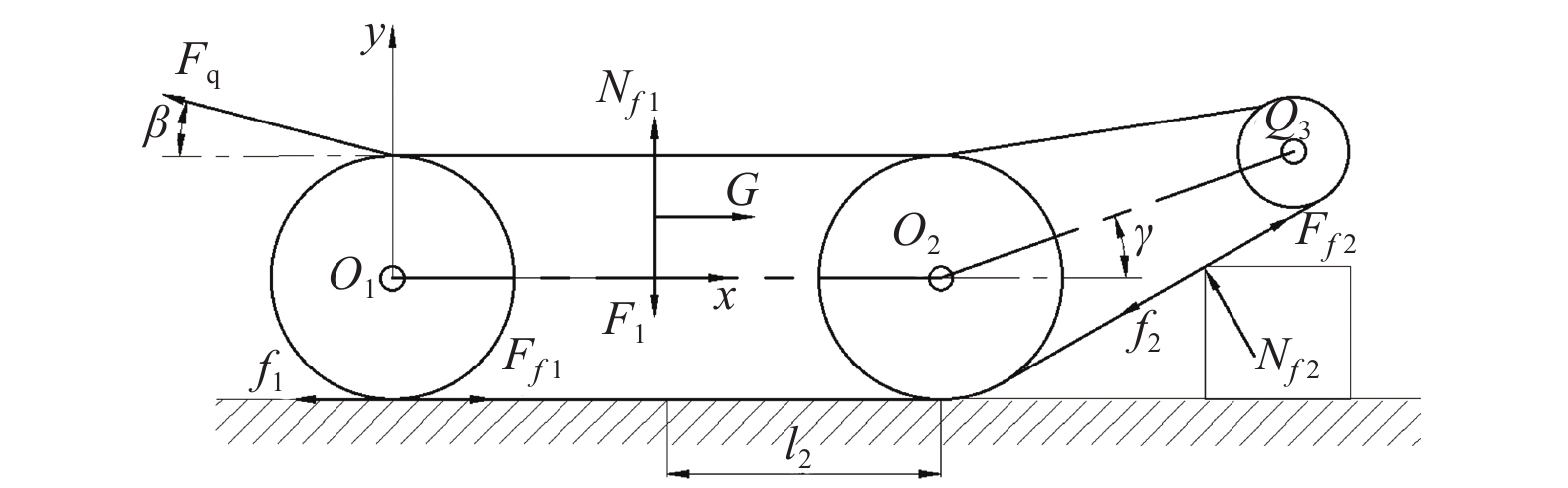
杨春, 罗天洪. 一种新型爬壁机器人越障过程的运动及动力学分析[J] . 机械传动,2019,43(9):87 − 92,95.
|
Figures(15) / Tables(4)
Copyright © Journal of Shanghai University of Engineering Science沪ICP备05052046号
Tel:86-21-67791000 Email:xuebao@sues.edu.cn
Address:333 Longteng Road, Shanghai, China China Pos:201620
Supported by:
Beijing Renhe Information Technology Co. Ltd




 DownLoad:
DownLoad: