

Design of Control System Based on Dual Robot Grinding Platform
-
摘要: 根据轮毂的结构特点,采用“分类分区”的策略对轮毂不同区域制订打磨方案. 重点对打磨空间受限且打磨轨迹复杂的轮毂孔端面区域,提出一种基于双机器人协作打磨的方案,并对双机器人协作控制系统进行详细地设计与介绍. 采用基于模型设计的方法完成双机器人控制系统的设计与开发,并进行机器人打磨轨迹跟踪和轮毂恒力打磨试验. 试验结果表明:一台dSPACE控制器可以实现双机器人控制,完成打磨轨迹跟踪且打磨接触力误差在±5 N范围内,满足轮毂打磨需求.Abstract: According to structural characteristics of wheel hub, the strategy of “classification and division” was adopted to formulate the grinding plan for different areas of the wheel hub. Focusing on the end face area of the hub hole with limited grinding space and complex grinding trajectory, a plan based on dual-robot collaborative grinding was proposed, and detailed design and introduction of the dual-robot collaborative control system were conducted. The design and development of the dual-robot control system were completed by the method of model-based design, and the robot grinding trajectory tracking and the wheel constant-force grinding experiment were carried out. The experimental results show that a dSPACE controller can realize the control of the dual robots, complete the grinding trajectory tracking and the grinding contact force error is within ±5 N, which will meet the needs of wheel grinding.
-
Key words:
- dSPACE controller /
- wheel hub /
- dual robot /
- force level hybrid control
-
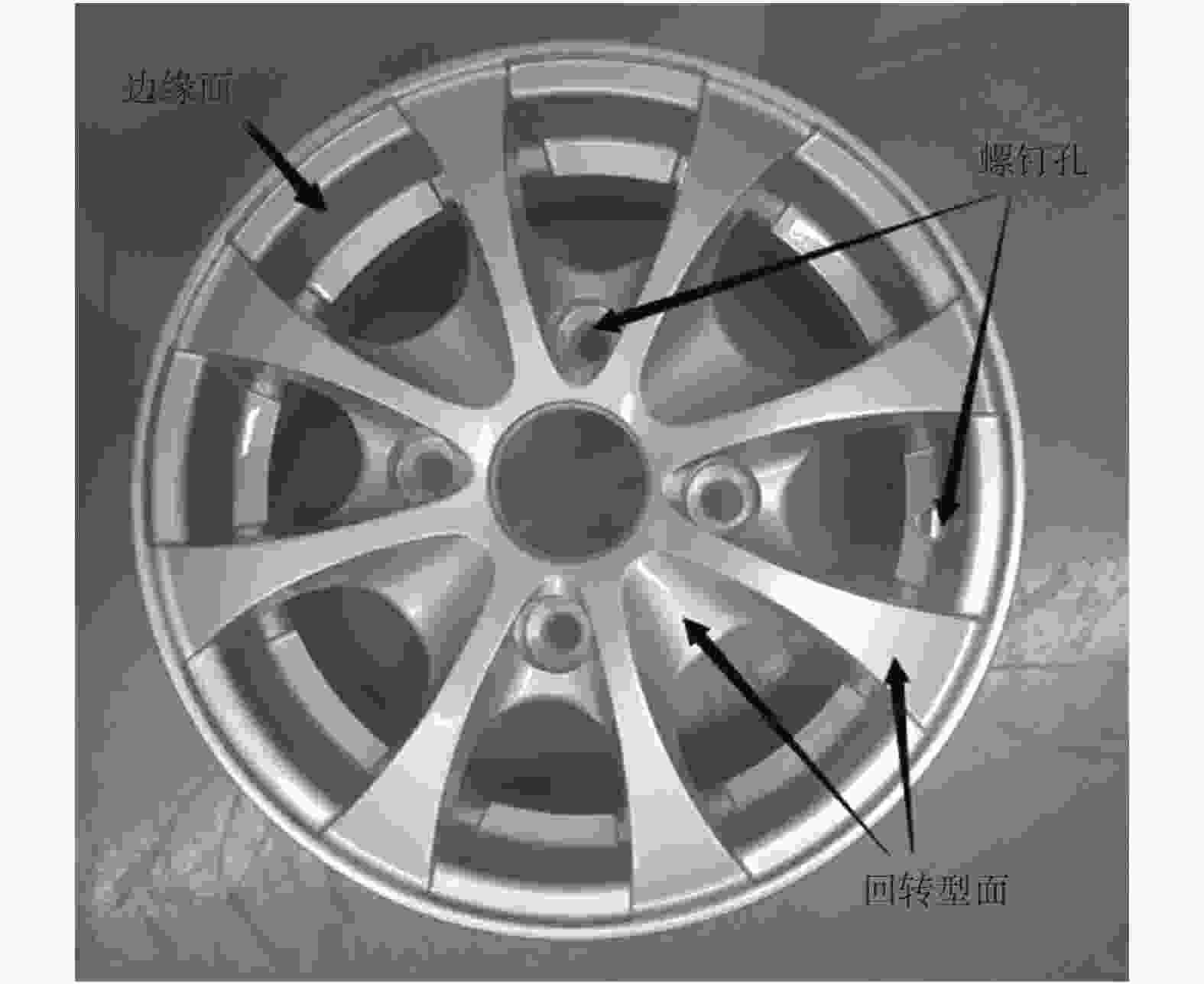
图 1 轮毂打磨“分类分区”示意图
Figure 1. Schematic diagram of wheel hub grinding classification partition
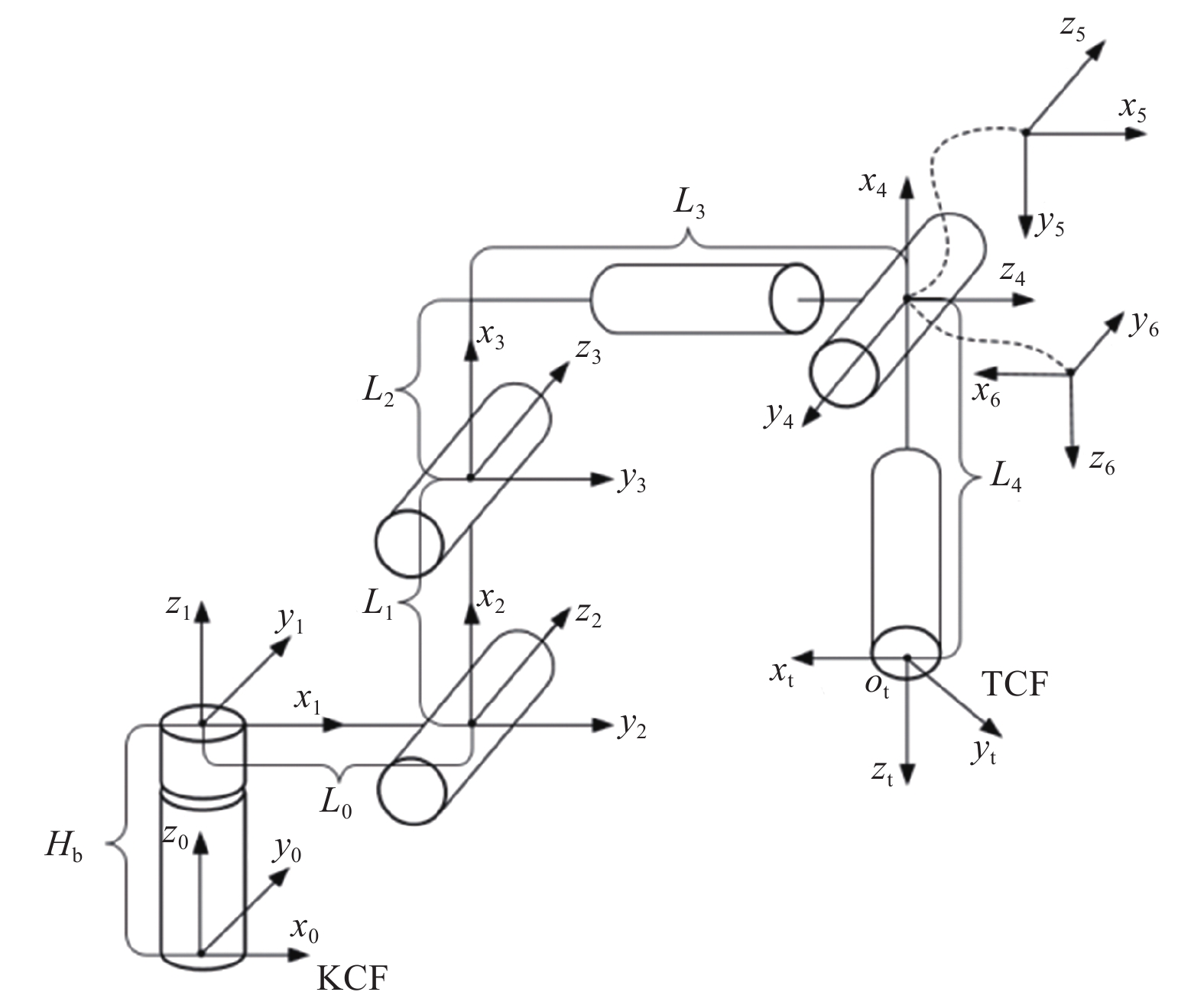
表 1 机器人D-H参数表
Table 1. Robot D-H parameter list
编号$i$ ${\alpha _{i - 1}}$ / rad ${a_{i - 1}}$ / mm ${\theta _i}$ / rad ${d_i}$ / mm 1 0 0 ${t_1}$ ${H_b}$ 2 $ - {\text{π}} /2$ ${L_0}$ ${t_2} - {\text{π}} {\rm{/2}}$ 0 3 0 ${L_1}$ ${t_3}$ 0 4 $ - {\text{π}} /2$ ${L_2}$ ${t_{\rm{4}}}$ ${L_3}$ 5 ${\text{π}} /2$ 0 ${t_{\rm{5}}} + {\text{π}} /2$ 0 6 $ - {\text{π}} /2$ 0 ${t_{\rm{6}}} + {\text{π}} $ 0  下载: 导出CSV
下载: 导出CSV
-
[1] 周裕庚, 俞桂英, 孔祥斌, 等. 机器人智能打磨抛光技术与成套设备研究[J] . 机器人技术与应用,2019, 187(1):40 − 42. [2] 杨一帆. 基于阻抗控制的弱刚性构件双机器人协同磨抛技术研究[D]. 武汉: 华中科技大学, 2019. [3] 郭万金. 复杂形状零部件打磨作业机器人研究[D]. 哈尔滨: 哈尔滨工业大学, 2017. [4] 荣誉, 刘双勇, 王洪斌, 等. 轮毂打磨5-DOF机械臂动力学建模与驱动参数预估[J] . 中国机械工程,2018, 29(4):449 − 456. [5] 刘海龙, 张蕾, 吴海波. 基于多工业机器人的轮毂打磨工作站系统[J] . 计算机与现代化,2020, 301(9):118 − 121. [6] 刘祚时, 吉协福, 姜鸿雅. 打磨机器人控制系统设计与研究[J] . 组合机床与自动化加工技术,2020, 555(5):113 − 115. [7] 沈悦明, 陈启军. dSPACE快速控制原型在机器人控制中的应用[J] . 机器人,2002, 24(6):545 − 549. [8] 杨帅, 薛岚. 基于阻抗控制的双臂机器人关节限制规避仿真研究[J] . 中国工程机械学报,2020(3):195 − 198, 204. [9] 段晋军, 甘亚辉, 戴先中. 双臂协调搬运过程中基于变阻抗模型的位置/力混合控制[J] . 机器人,2019, 41(6):795 − 802, 812. -

 下载:
下载:






 点击查看大图
点击查看大图

图(14) / 表(1)
计量
- 文章访问数: 1056
- HTML全文浏览量: 546
- PDF下载量: 258
- 被引次数: 0
