

Research on sensorless control strategy of PMSM
-
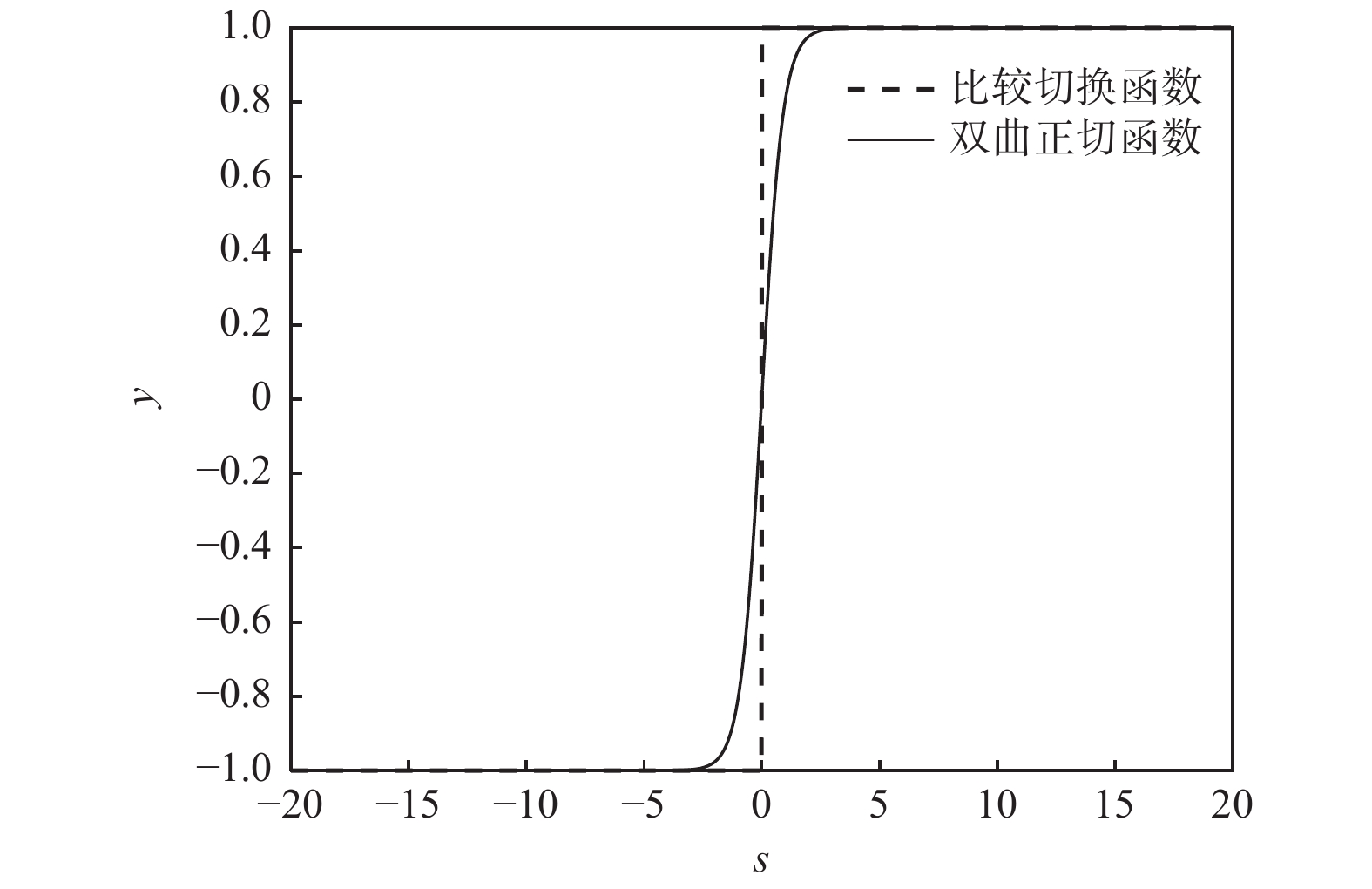
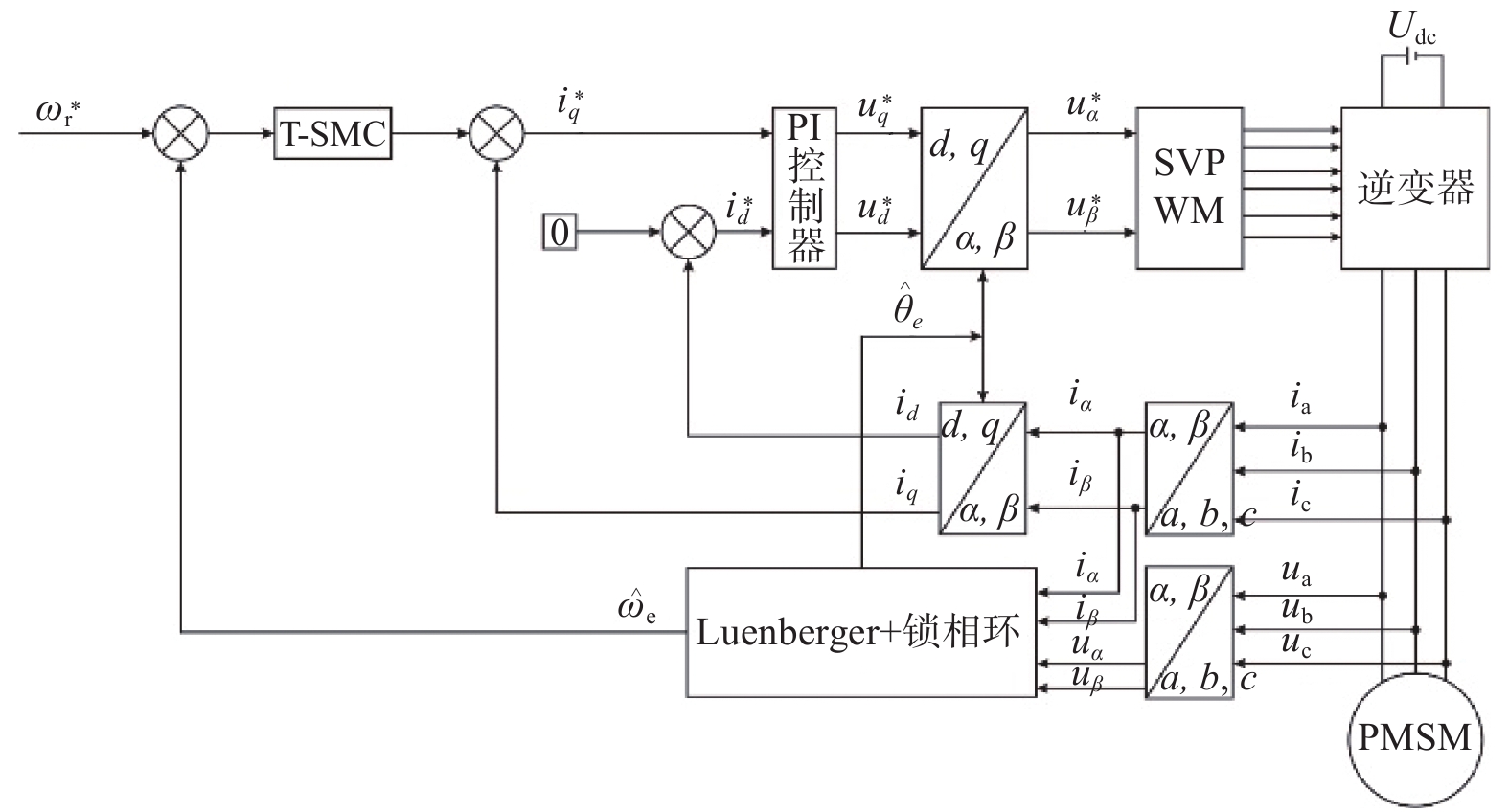
摘要: 针对电子水泵用永磁同步电机无传感器控制系统中调速存在超调、抖振和响应慢的问题,采用一种混合滑模变结构的速度环和龙伯格观测器的PMSM无传感器控制算法. 在转速环环节设计基于新型趋近律的滑模速度控制器,在传统指数趋近律的基础上,在等速项中加入运动点的运动误差,采取双曲正切函数替代比较切换函数,改善趋近滑模面运动过程中的收敛速度和抖振抑制能力. 采用线性控制结构的龙伯格观测器结合锁相环,应用到无传感器控制系统中,改善估算转速抖振问题及稳定性. 仿真结果表明,在电机空载启动和外加扰动工况下,该算法可有效提高永磁同步电机无传感器控制系统转速的跟踪效果,改善转速的超调与抖振问题,同时提高系统的抗外部干扰能力.Abstract: Aiming at the problems of overshoot, chattering and slow response in the sensorless control system of permanent magnet synchronous motor (PMSM) for electronic water pump, PMSM sensorless control algorithm based on hybrid sliding mode speed controller and Luenberger observer was proposed. In the speed loop, a sliding mode speed controller based on the new reaching law was designed. On the basis of the traditional exponential reaching law, the motion error of the moving point was introduced into the constant velocity term, and the hyperbolic tangent function was adopted to replace the comparison switching function, so as to improve the convergence speed and chattering suppression ability of the sliding mode. The Luenberger observer of the linear control structure combined with the phase-locked loop was applied to the sensorless control system, in order to improve the chattering problem and stability of the estimated speed. The simulation results show that under the no-load starting and external disturbance conditions of the motor, the algorithm can effectively improve the speed tracking effect of PMSM sensorless control system, improve the speed overshoot and chattering problems, and enhance the anti-interference ability of the system.
-
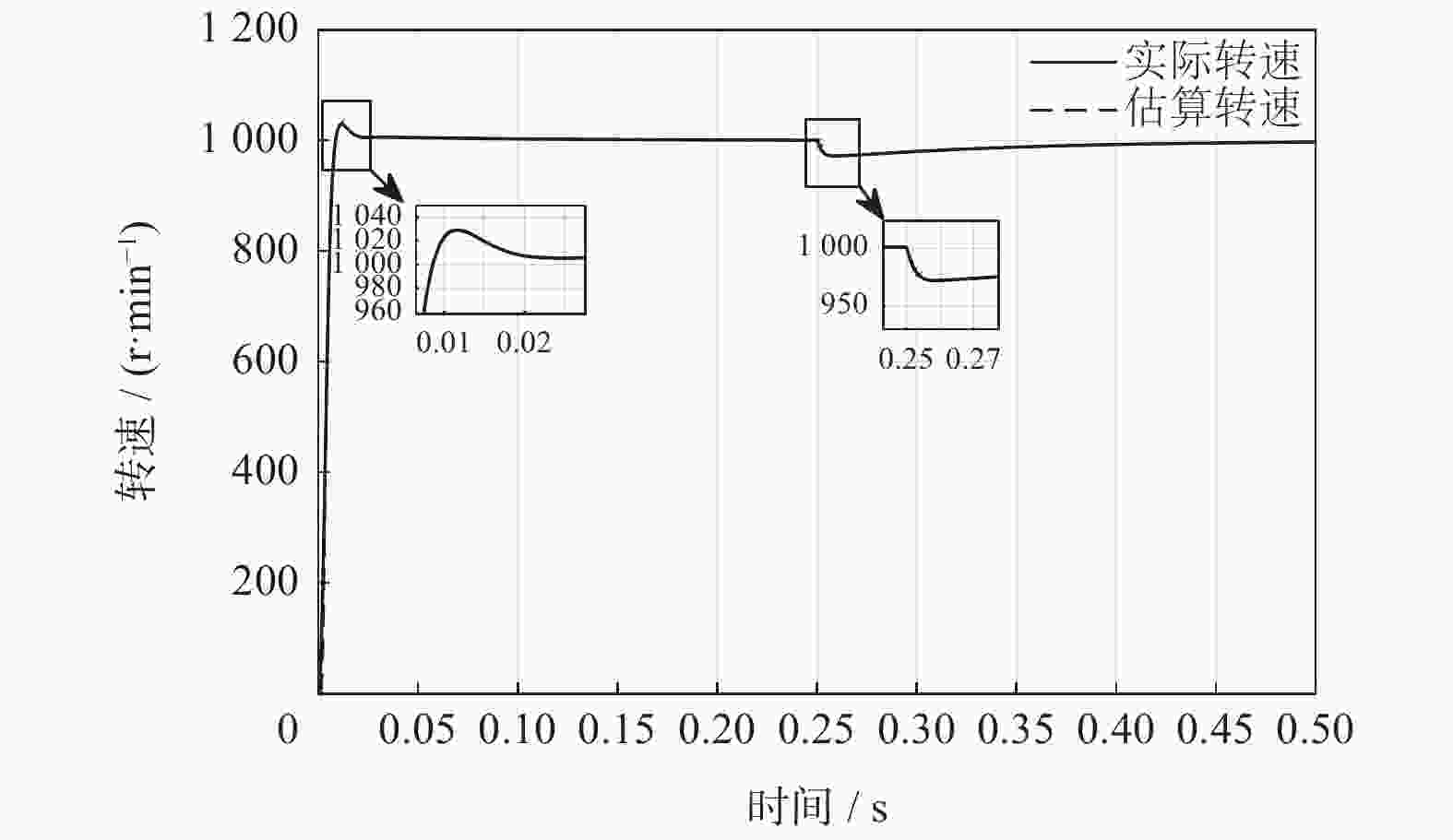
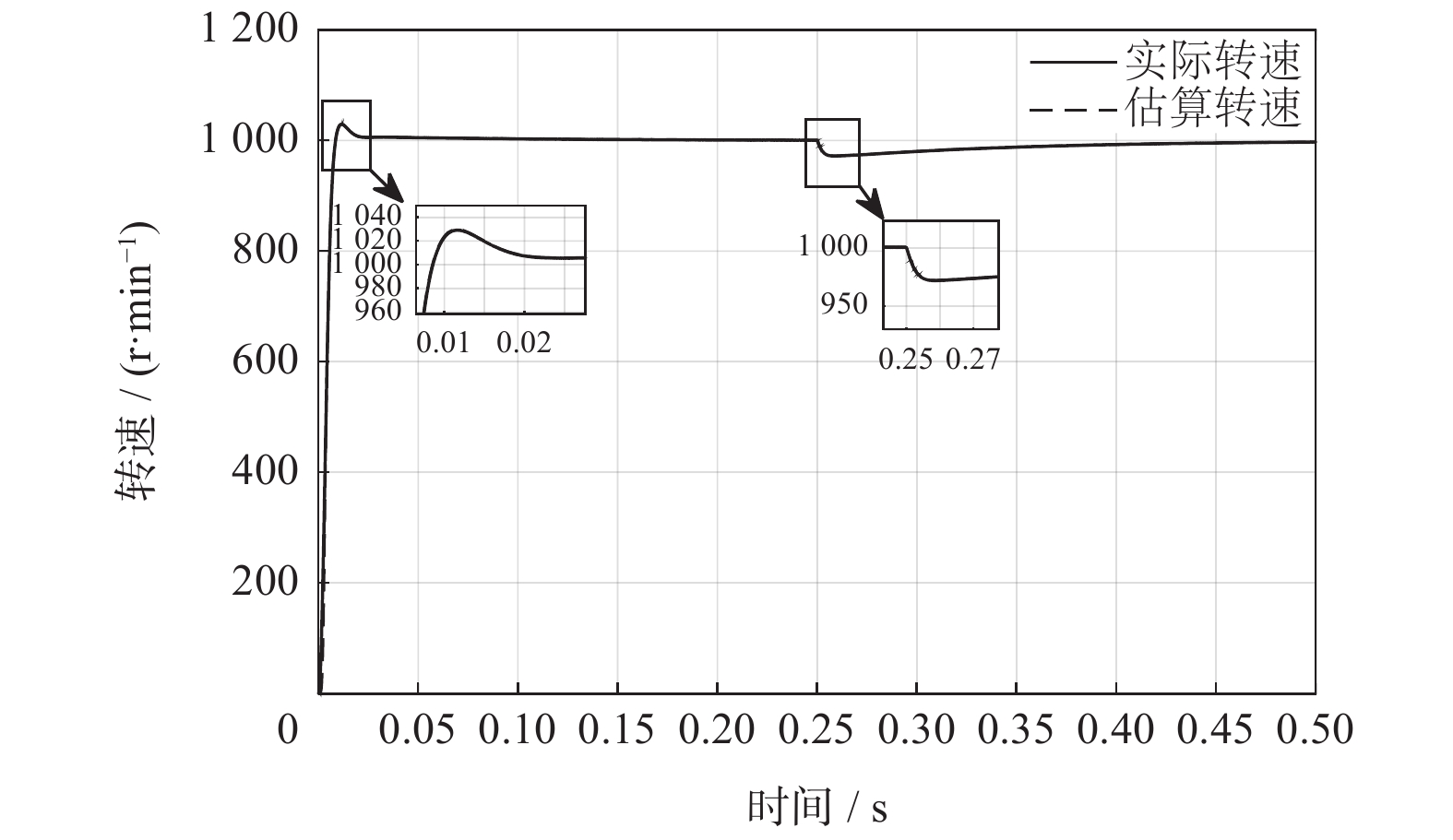
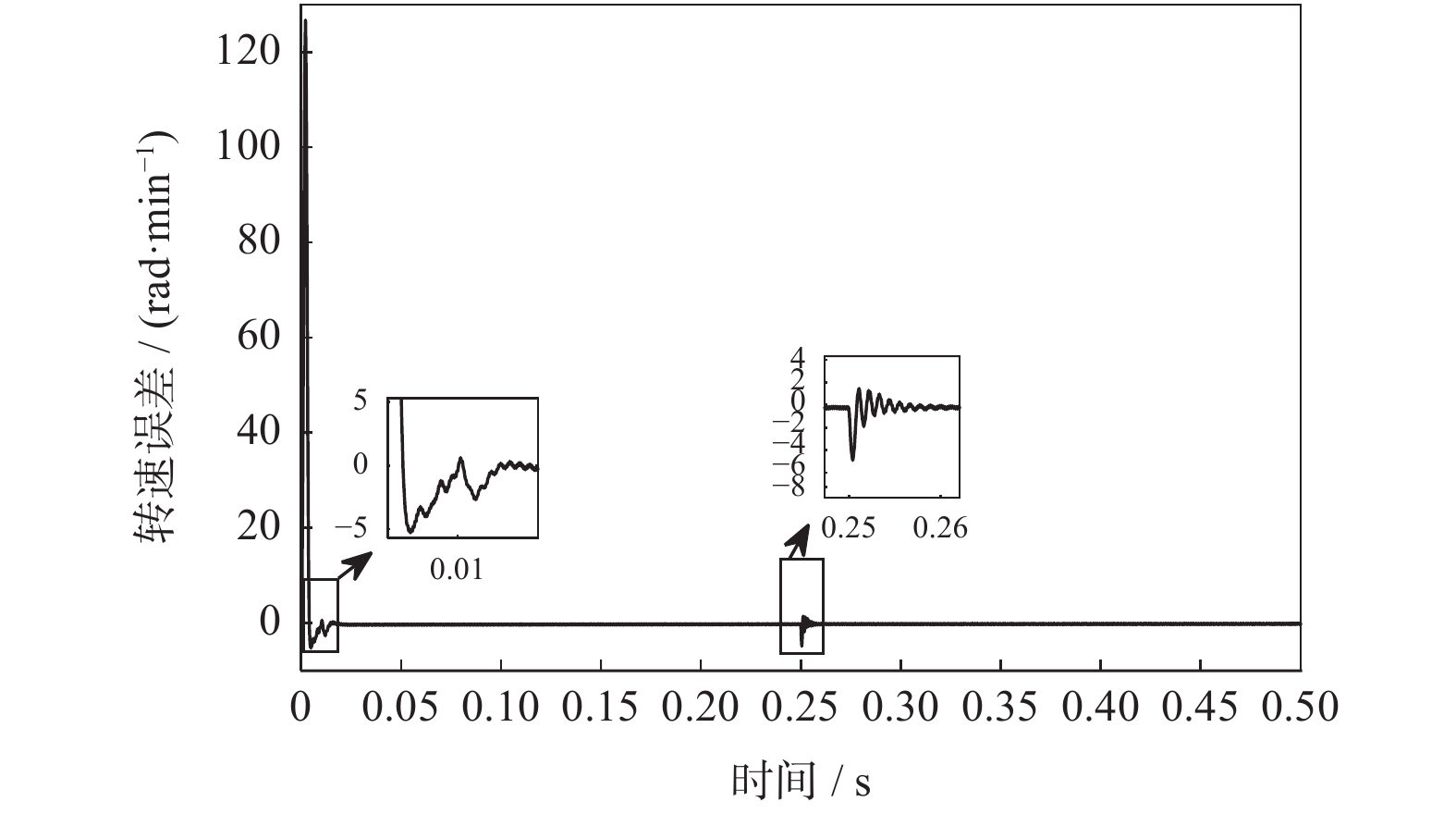
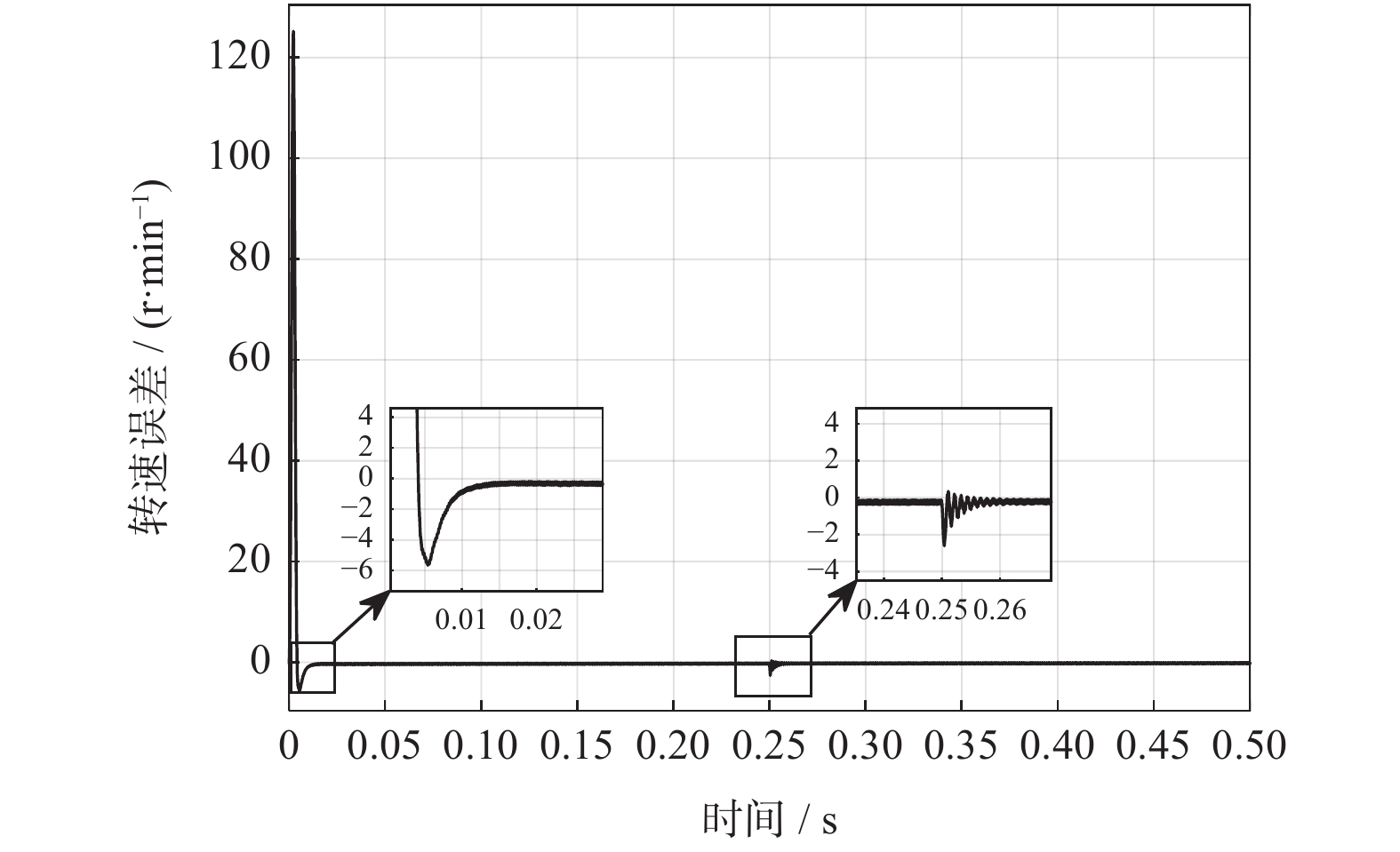
图 6 Luenberger+T–SMC转速环下的转速曲线
Figure 6. Speed curve under Luenberger + T–SMC speed loop
表 1 PMSM参数表
Table 1. Table of PMSM parameters
参数 取值 极对数$P$ 4 阻尼系数$B$ 0.0001 定子电阻${R \mathord{\left/ {\vphantom {R \Omega }} \right. } \Omega }$ 2.875 定子电感${ { {L_s} } \mathord{\left/ {\vphantom { { {L_{\rm{s}}} } { {\text{mH} } } }} \right. } { {\text{mH} } } }$ 0.0085 永磁体磁链${ { {\varphi _{\rm{f}}} } \mathord{\left/ {\vphantom { { {\varphi _{\rm{f} } } } {W{\text{b} } } } } \right. } { {\text{Wb} } } }$ 0.175 转动惯量$ J/(\text{kg}·{\text{m}}^{2}) $ 0.001  下载: 导出CSV
下载: 导出CSV
表 2 性能对比
Table 2. Performance comparison
性能指标 条件设置 PI转速环/% T–SMC转速环/% 超调量 空载启动 19.967 2.968 突加负载 5.326 2.687
下载: 导出CSV
-
[1] KIVANC O C, OZTURK S B. Sensorless PMSM drive based on stator feedforward voltage estimation improved with MRAS multi-parameter estimation[J] . IEEE/ASME Transactions on Mechatronics,2018,23(3):1326 − 1337. doi: 10.1109/TMECH.2018.2817246 [2] ZHANG X N, FOO G H B. A constant switching frequency-based direct torque control method for interior permanent-magnet synchronous motor drives[J] . IEEE/ASME Transactions on Mechatronics,2016,21(3):1445 − 1456. doi: 10.1109/TMECH.2015.2480782 [3] 王毅波, 曹宽, 李彪. 一种改进型指数趋近律的永磁同步电机滑模控制[J] . 微电机,2019,52(12):81 − 84,106. doi: 10.3969/j.issn.1001-6848.2019.12.016 [4] 郭磊磊, 王华清, 代林旺, 等. 基于超螺旋滑模观测器的永磁同步电机无速度传感器控制方法[J] . 电力自动化设备,2020,40(2):21 − 31,34. [5] 苗敬利, 张宇航, 秦王毓. 基于超螺旋算法的永磁同步电机无传感器控制策略[J] . 现代电子技术,2020,43(17):162 − 165,170. [6] 王要强, 朱亚昌, 冯玉涛, 等. 永磁同步电机新型趋近律滑模控制策略[J] . 电力自动化设备,2021,41(1):192 − 198. [7] 苗敬利, 周重霞, 郑大伟. 永磁同步电机调速系统变指数趋近律控制[J] . 电气传动,2019,49(11):18 − 21. [8] 苗敬利, 郑大伟, 周重霞. 基于混合滑模控制器和反正切观测器的SPMSM直接转矩控制[J] . 控制与决策,2019,34(9):1831 − 1839. [9] 罗雯, 赵峰, 高锋阳, 等. 基于新型指数趋近率和转子位置观测器的PMSM积分滑模控制[J] . 电测与仪表,2021,58(1):172 − 176. [10] 董力维. 电动汽车电机无传感器稳定性能控制研究[J] . 计算机仿真,2017,34(5):182 − 186. doi: 10.3969/j.issn.1006-9348.2017.05.038 [11] 苑国锋, 牛泽农, 郑春雨, 等. 一种低载波比下内埋式永磁同步电机离散龙贝格观测器[J] . 电工技术学报,2019,34(2):236 − 244. [12] 刘细平, 丁卫中, 袁长征, 等. 空调压缩机低速无位置传感器控制策略[J] . 电气传动,2021,51(2):3 − 8. -

 下载:
下载:



 点击查看大图
点击查看大图
图(8) / 表(2)
计量
- 文章访问数: 2044
- HTML全文浏览量: 1161
- PDF下载量: 900
- 被引次数: 0
