

Registration method for grid point cloud based on improved FPFH
-
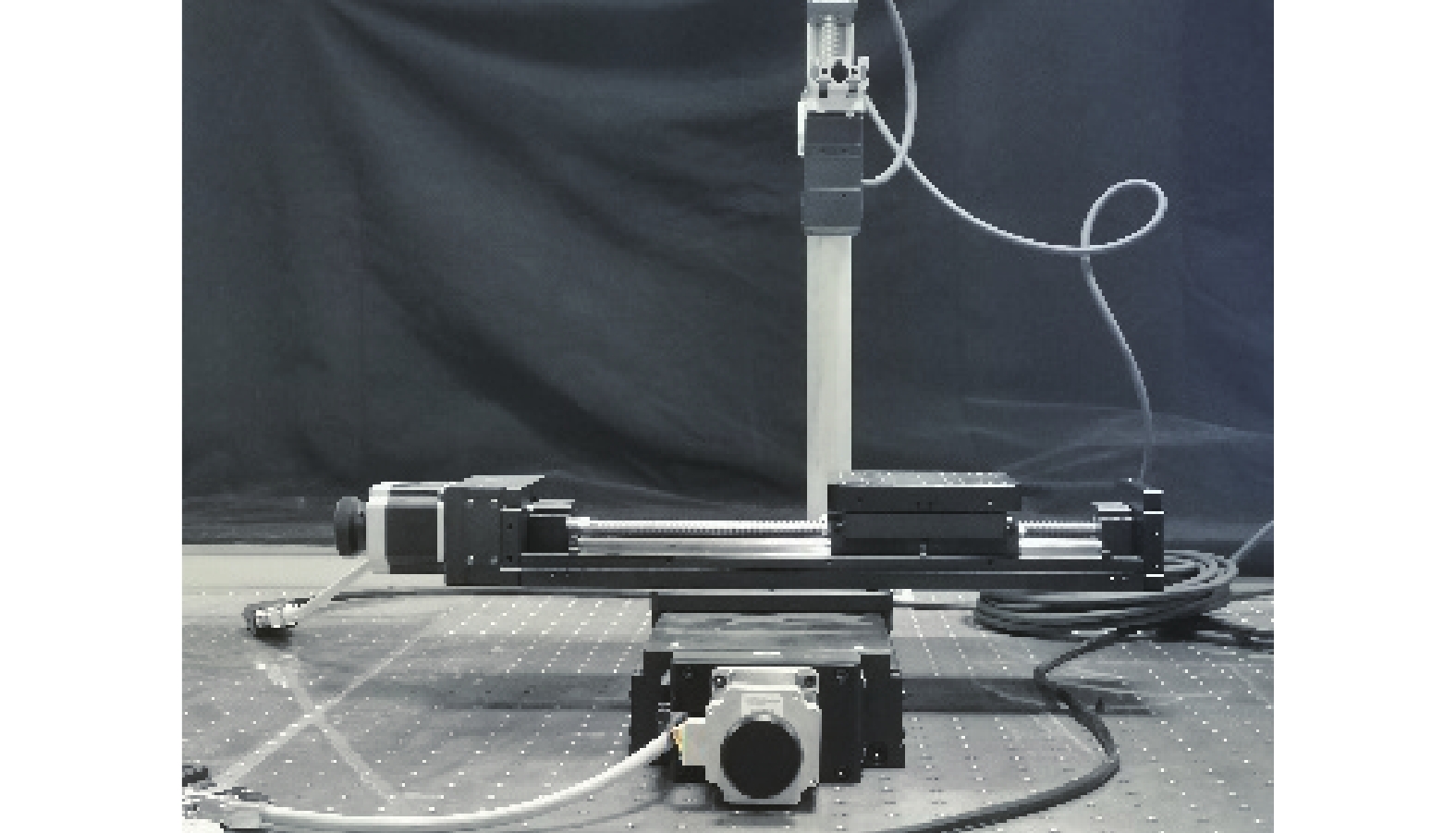
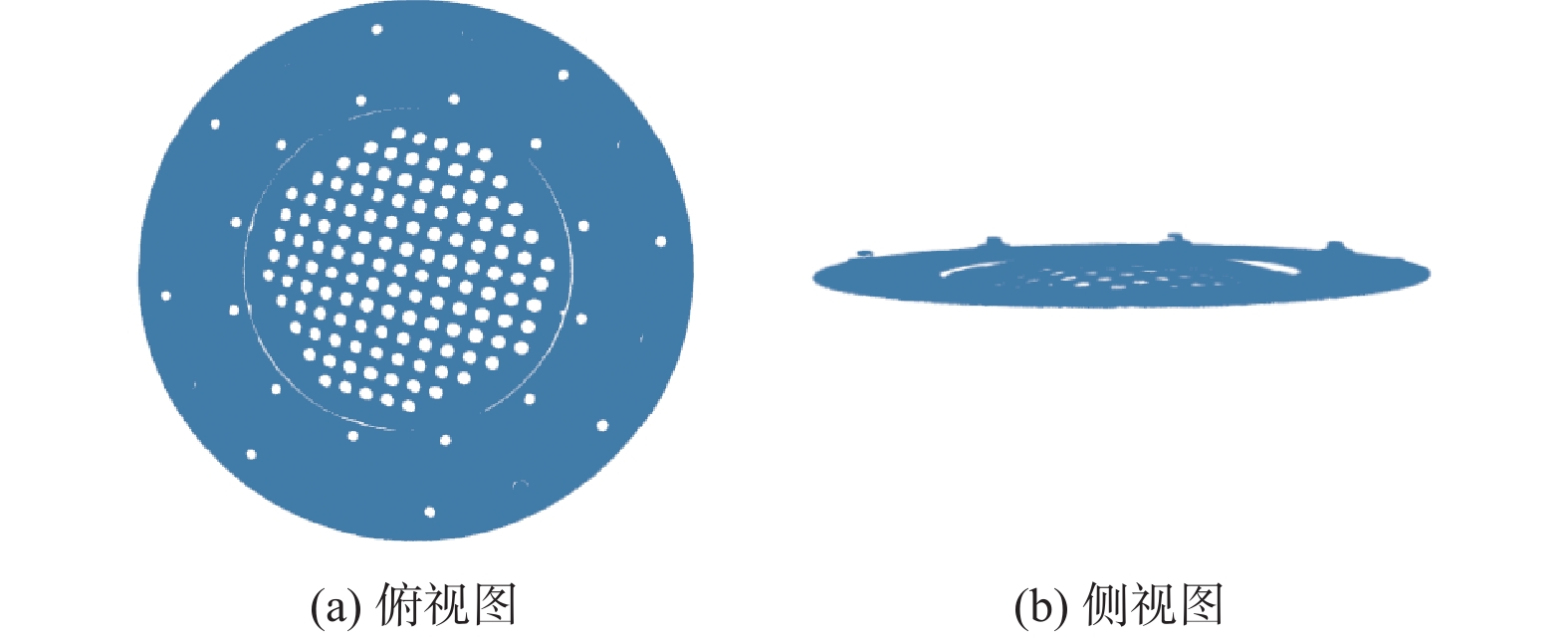
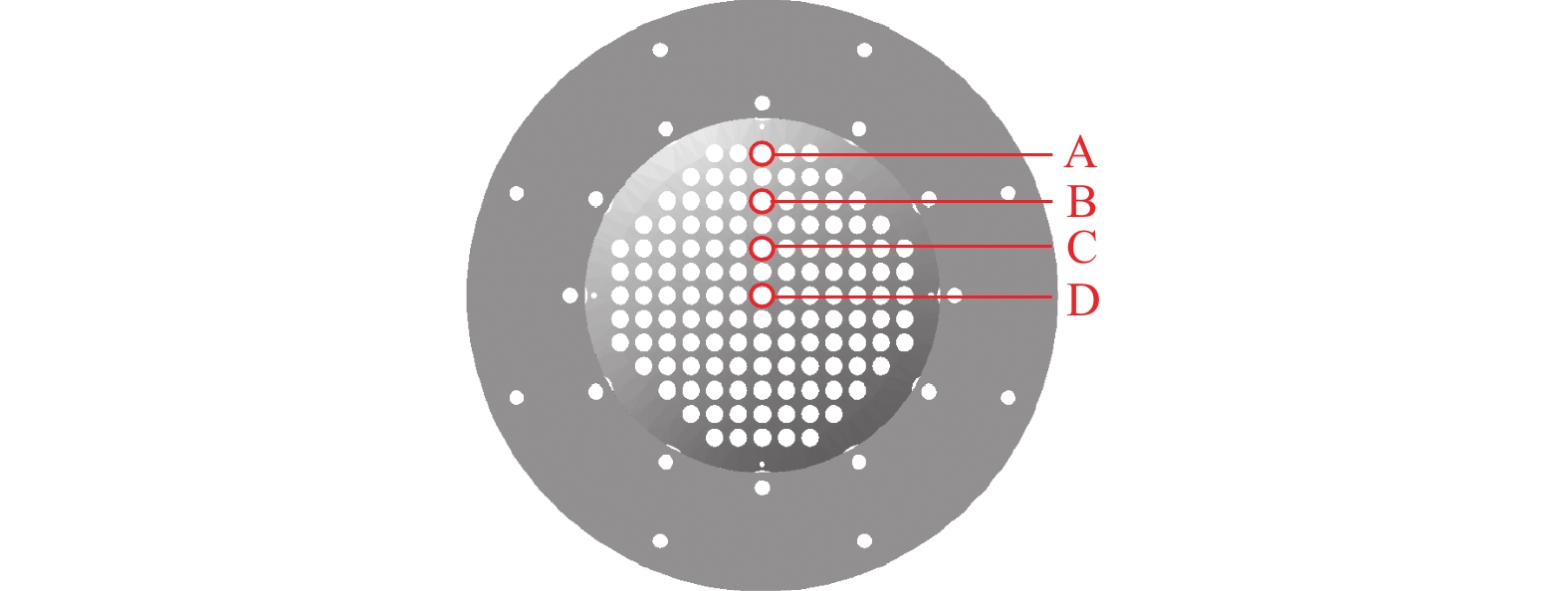
摘要: 针对栅极件点云的匹配问题,提出一种改进的快速点特征直方图(Fast Point Feature Histogram,FPFH)描述子. 在FPFH基础上增加邻域密度作为点特征的描述,并在使用k维树(k-dimensional tree,k-d tree)算法搜索对应点时将巴氏距离作为指标. 仿真过程中,将该方法与传统FPFH的匹配效果进行比较. 搭建试验装置采集栅极件表面点云数据,并利用改进的FPFH算法和经典的迭代最近点算法(Iterative Closest Point,ICP)进行匹配. 试验结果表明,匹配后的点云尺寸精度在1 μm级别,栅孔误差范围在 ±(20~40) μm内,理论上满足了栅极件测量精度要求.Abstract: An improved fast point feature histogram (FPFH) was proposed for the initial registration of grid point cloud. The neighborhood density was added as a point feature description on the basis of FPFH. When searching the corresponding points with k-dimensional tree (k-d tree), the Bhattacharyya distance was used as the index. This improved method was compared with FPFH in the simulation. Then, the test device was built to collect the grid’s surface point cloud data. The data were registered with improved FPFH method and iterative closest point (ICP). Test results show that the precision level of the matched point cloud is 1 μm and the error range of grid hole stays in ±(20~40) μm, which theoretically satisfy the precision requirement of the grid.
-
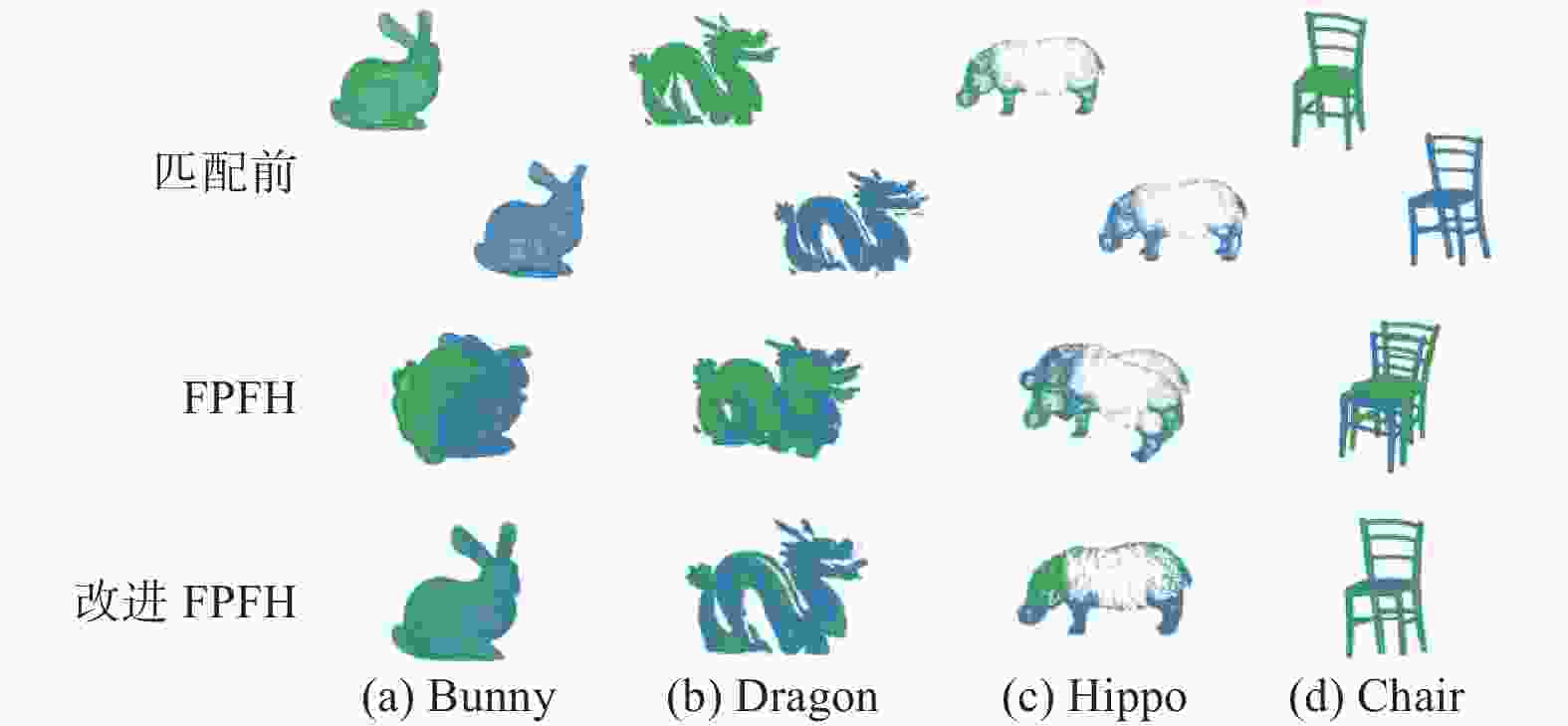
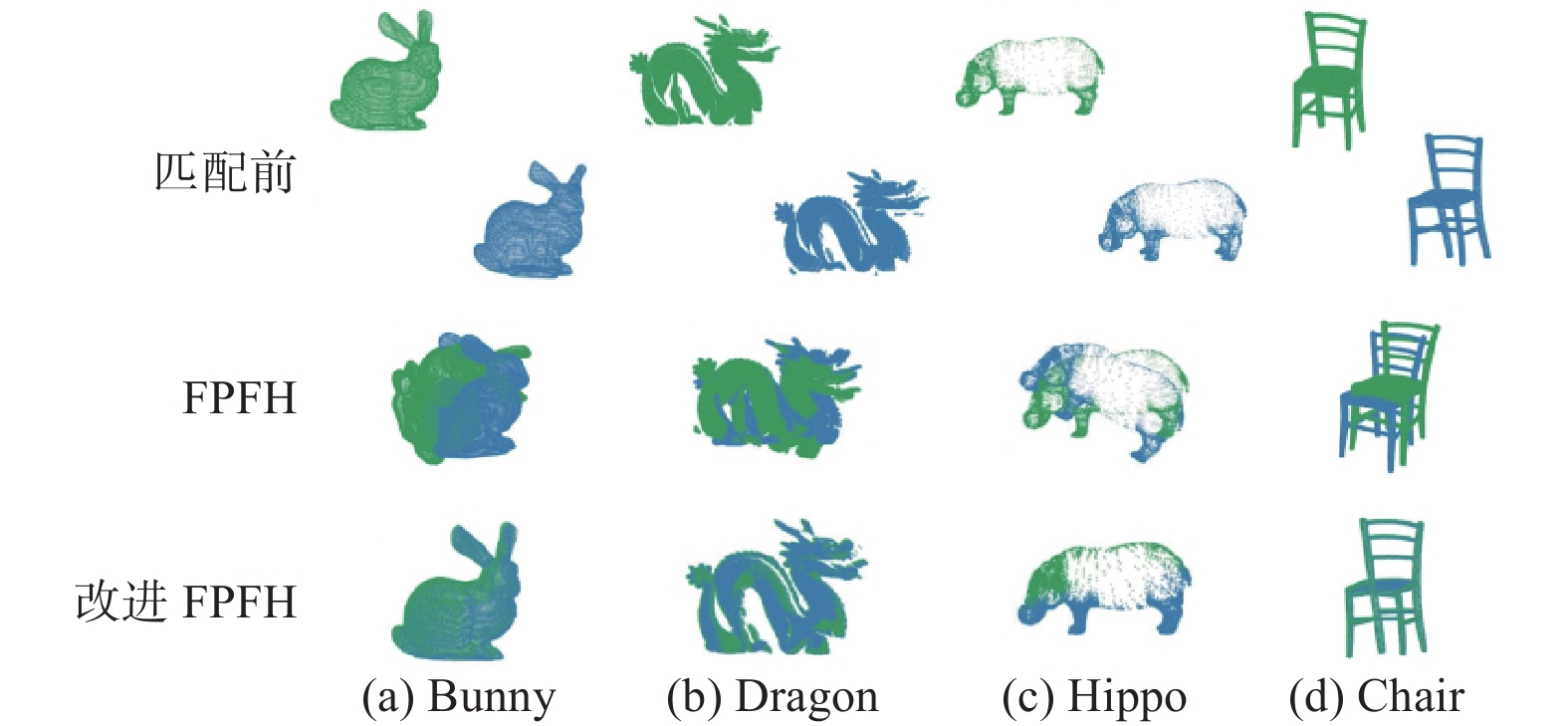
图 6 FPFH与改进方法匹配效果比较
Figure 6. Comparison of registration effect between FPFH and improved FPFH
表 1 匹配误差
Table 1. Error of registration
栅极件 特征值 FPFH 改进FPFH Bunny et/mm 20.86 5.24 er/(°) X 86.50 0.82 Y 86.75 0.80 Z 1.67 0.34 Dragon et/mm 24.56 8.32 er /(°) X 39.63 0.61 Y 9.74 1.05 Z 2.66 0.41 Hippo et/mm 13.04 2.42 er /(°) X 43.07 0.22 Y 0.74 0.16 Z 1.06 0.15 Chair et /mm 27.05 3.90 er /(°) X 0.18 0.27 Y 0.83 0.23 Z 0.16 0.14  下载: 导出CSV
下载: 导出CSV
表 2 尺寸误差比较
Table 2. Dimensional error comparison
测量对象 理论值/mm 测量值/mm 误差/% 屏栅直径 80 79.985 −0.019 栅孔A直径 2 2.037 1.850 栅孔B直径 2 2.030 1.500 栅孔C直径 2 2.017 0.850 栅孔D直径 2 2.012 0.600
下载: 导出CSV
-
[1] BESL P J, MCKAY H D. A method for registration of 3-D shapes[J] . IEEE Transactions on Pattern Analysis & Machine Intelligence,1992,14(2):239 − 256. [2] REN Z L, WANG L G, BI L. Robust GICP-Based 3D LiDAR SLAM for underground mining environment[J] . Sensors,2019,19(13):2915. doi: 10.3390/s19132915 [3] 王立玲, 苏华强, 马东. 基于ICP匹配和贝叶斯逆传感器模型的地图构建[J] . 激光杂志,2020,41(12):50 − 56. [4] 吴义山, 徐增波. 基于相移结构光重建的三维数字化服装建模[J] . 上海工程技术大学学报,2015,29(4):353 − 359. [5] 罗锦鸿, 陈新度, 吴磊. 基于点云配准的曲面三维差异检测[J] . 组合机床与自动化加工技术,2021(1):96 − 100. doi: 10.13462/j.cnki.mmtamt.2021.01.023 [6] 姚敏, 赵增浩, 赵敏, 等. 复杂结构件内部缺陷检测[J] . 仪器仪表学报,2020,41(10):213 − 220. [7] 陶谦, 熊风光, 刘涛, 等. 多幅点云数据与纹理序列间的自动配准方法[J] . 计算机工程,2020,46(10):259 − 265, 274. [8] 宫文. 光栅投影旋转测量中重叠点云消冗与纹理映射研究[D]. 绵阳: 西南科技大学, 2020. [9] RUSU R B, BLODOW N, BEETZ M. Fast point feature histograms (FPFH) for 3D registration[C]//Proceeding of IEEE International Conference on Robotics and Automation. Kobe: IEEE, 2009: 3212−3217. [10] 朱正伟, 祝磊, 饶鹏. 基于BS-HMM和巴式距离的手势识别技术研究[J] . 计算机应用与软件,2019,36(6):163 − 166, 253. -

 下载:
下载:



 点击查看大图
点击查看大图

图(10) / 表(2)
计量
- 文章访问数: 935
- HTML全文浏览量: 534
- PDF下载量: 530
- 被引次数: 0
