

Intelligent vehicle trajectory tracking control algorithm based on recursive least square
-
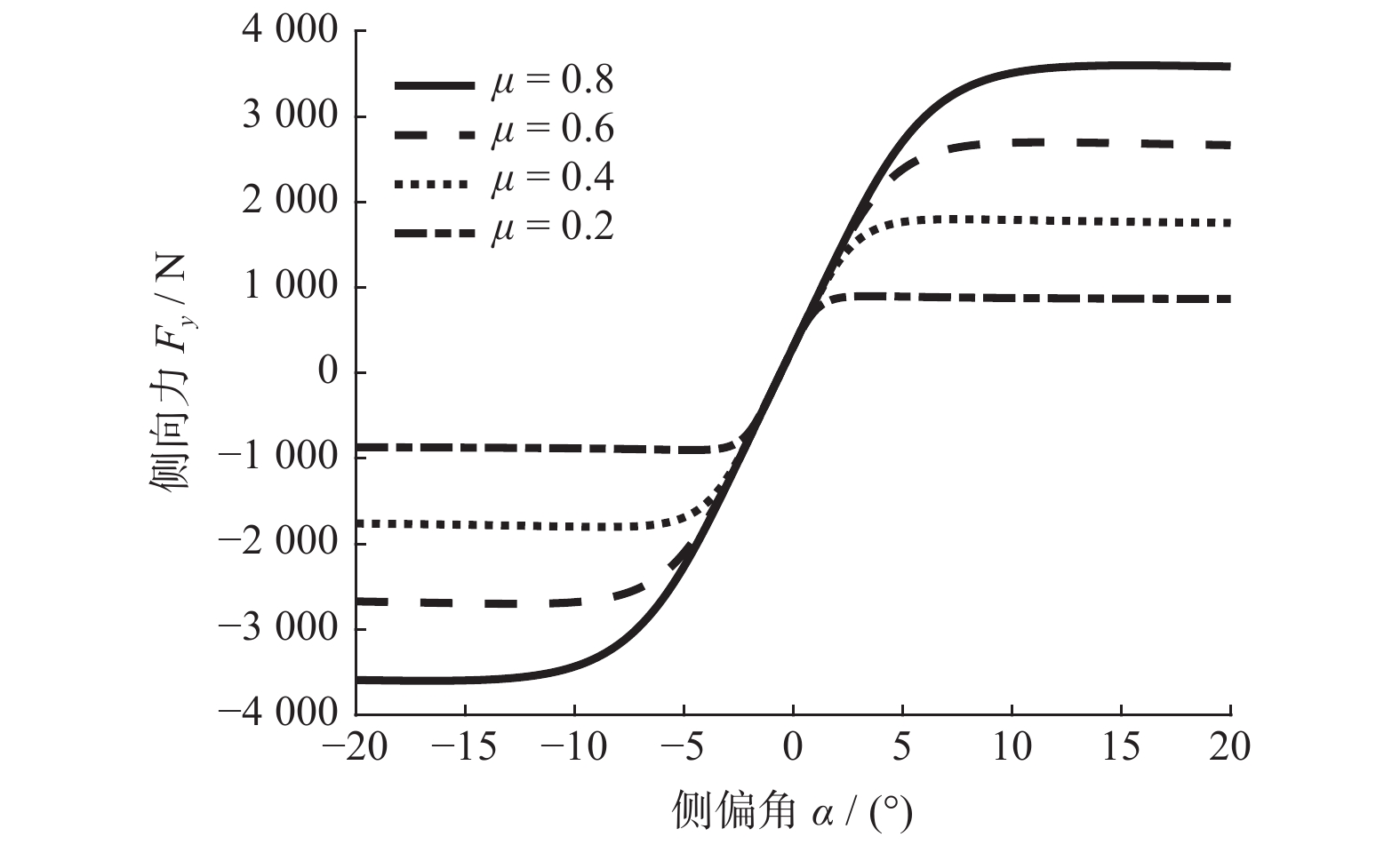
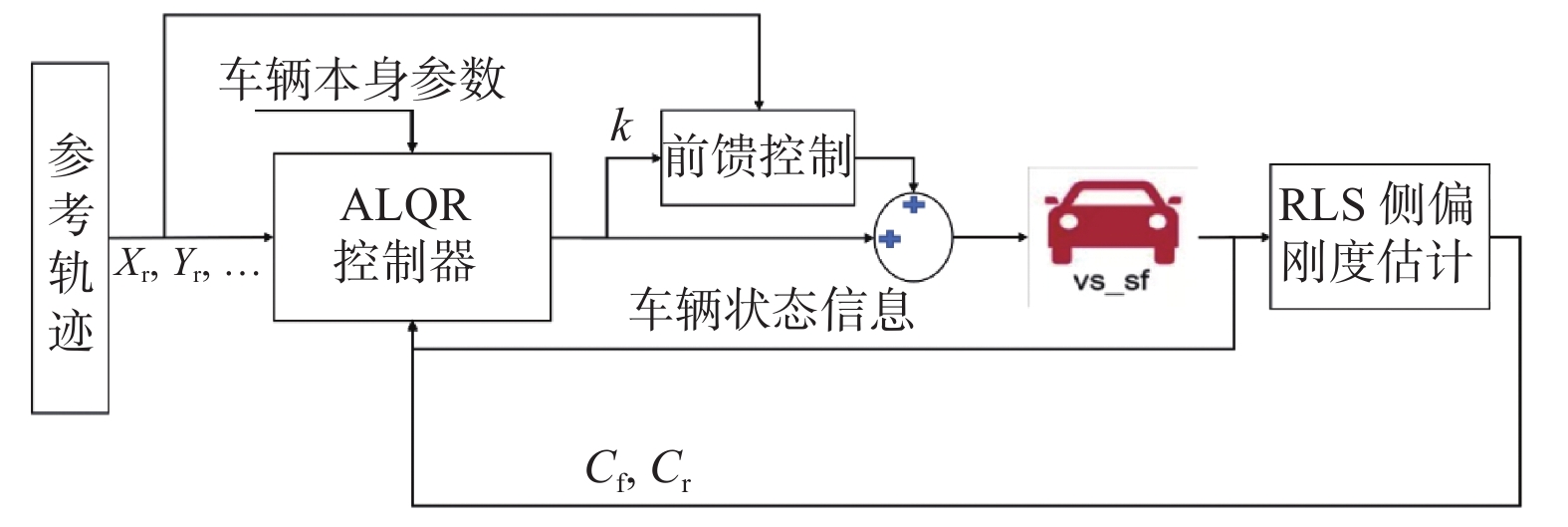
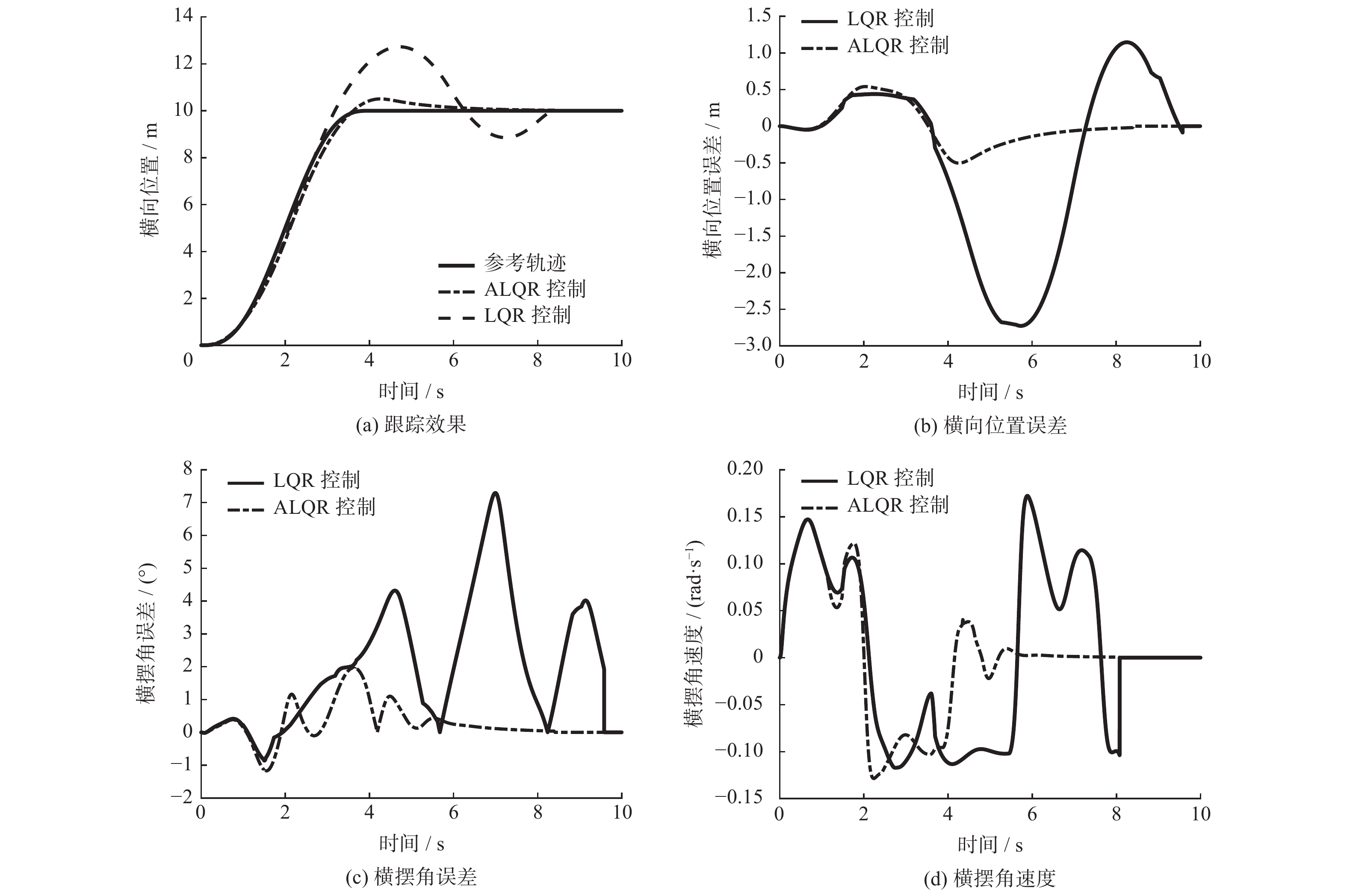
摘要: 提出一种实时估计轮胎侧偏刚度的自适应横向最优跟踪控制算法. 路面附着系数的改变使得轮胎侧向力的近似线性区间发生改变,线性近似得到的轮胎侧偏刚度将不再可靠. 基于递归最小二乘算法,以轮胎侧偏角和侧向力作为输入,实时在线估计轮胎的侧偏刚度,进而提出自适应线性二次型调节器(Adaptive Linear Quadratic Regulator,ALQR)控制器. 在Matlab/Simulink和Carsim联合仿真平台上对其有效性和稳健性进行验证. 结果表明,在多种路面附着条件和不同车速下,所设计的控制算法的性能均优于传统线性二次型调节器(Linear Quadratic Regulator,LQR)控制算法,最大横向位置误差和横摆角误差分别降低81.5%和73.0%. 通过实车测试,算法的实际应用性和有效性得到实证,最大轨迹跟踪误差仅为0.56 m.Abstract: A novel adaptive lateral optimal tracking control algorithm for real-time estimation of tire lateral stiffness was proposed. The approximate linear range of tire lateral forces were altered with variation in road surface adhesion coefficients, rendering tire lateral stiffness estimations based on linear approximations unreliable. Utilizing the recursive least squares algorithm and taking tire slip angle and lateral force as inputs, the tire's lateral stiffness was estimated in real time and an adaptive linear quadratic regulator (ALQR) controller was developed. The effectiveness and robustness of the algorithm were validated on a joint simulation platform combining Matlab/Simulink and Carsim. The results demonstrated that under various road surface adhesion conditions and at different vehicle speeds, the performance of the designed control algorithm consistently surpassed that of the traditional linear quadratic regulator (LQR) control algorithm. Specifically, the maximum lateral position error and yaw angle error were reduced by 81.5% and 73.0%, respectively. Real-vehicle tests empirically validated the practical applicability and effectiveness of the algorithm, with the maximum trajectory tracking error being only 0.56 m.
-
Key words:
- recursive least squares /
- track tracking /
- optimum control /
- adaptive control
-
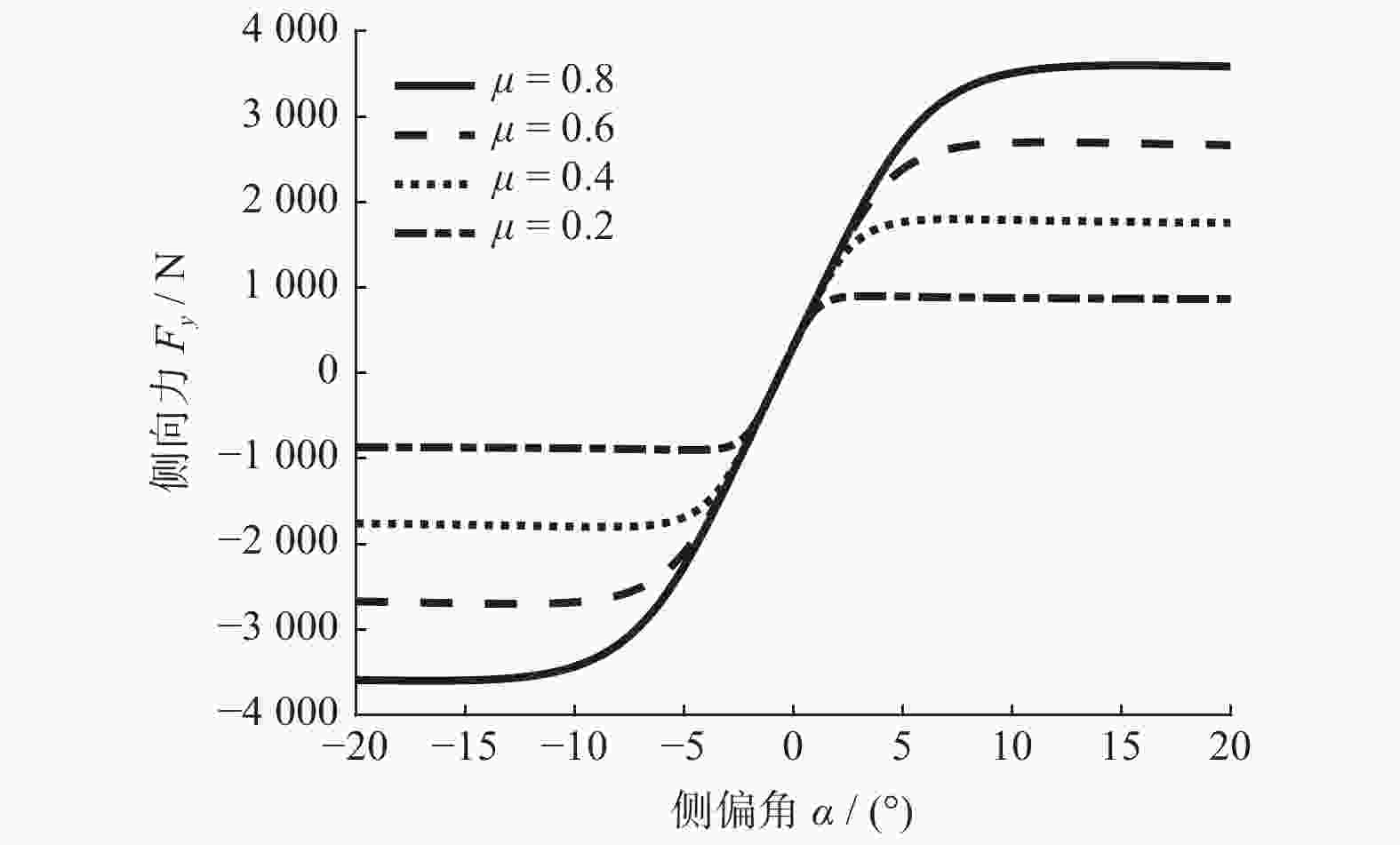
图 3 不同附着系数下侧偏角与侧向力的关系
Figure 3. Relationship between lateral deflection angle and lateral force under different adhesion coefficients
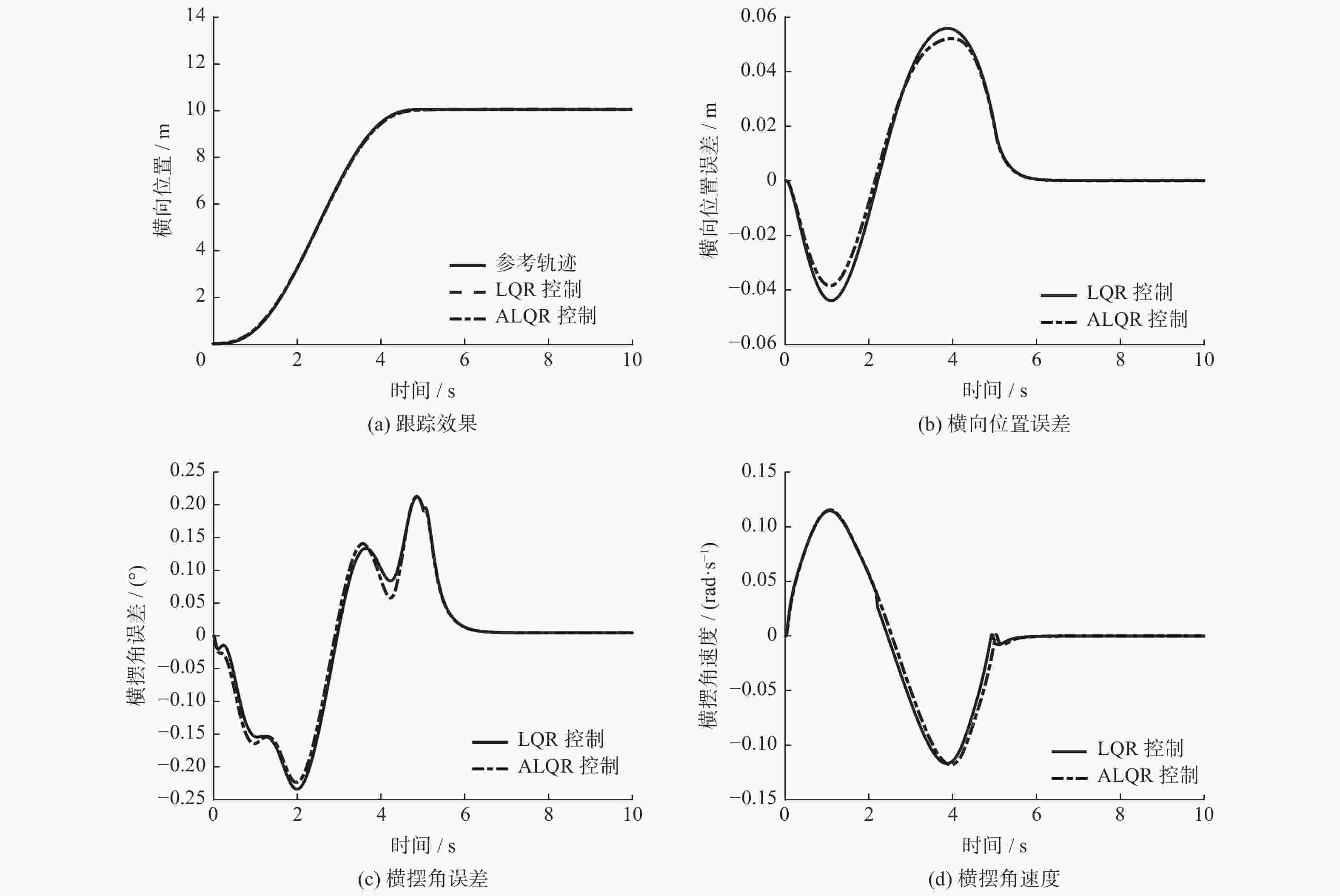
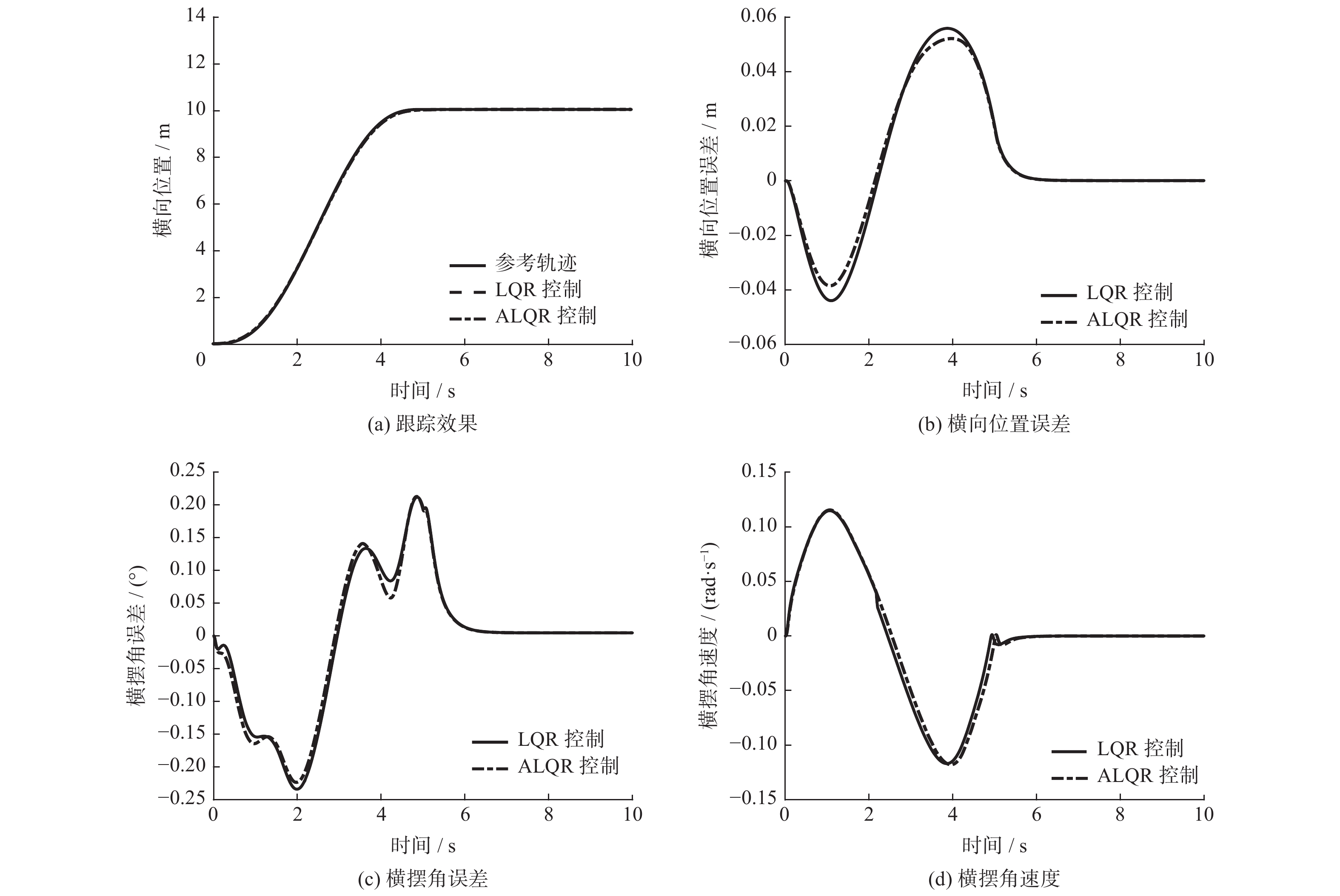
图 5 高附着工况72 km/h控制效果对比
Figure 5. Comparison of 72 km/h control effect under high adhesion condition
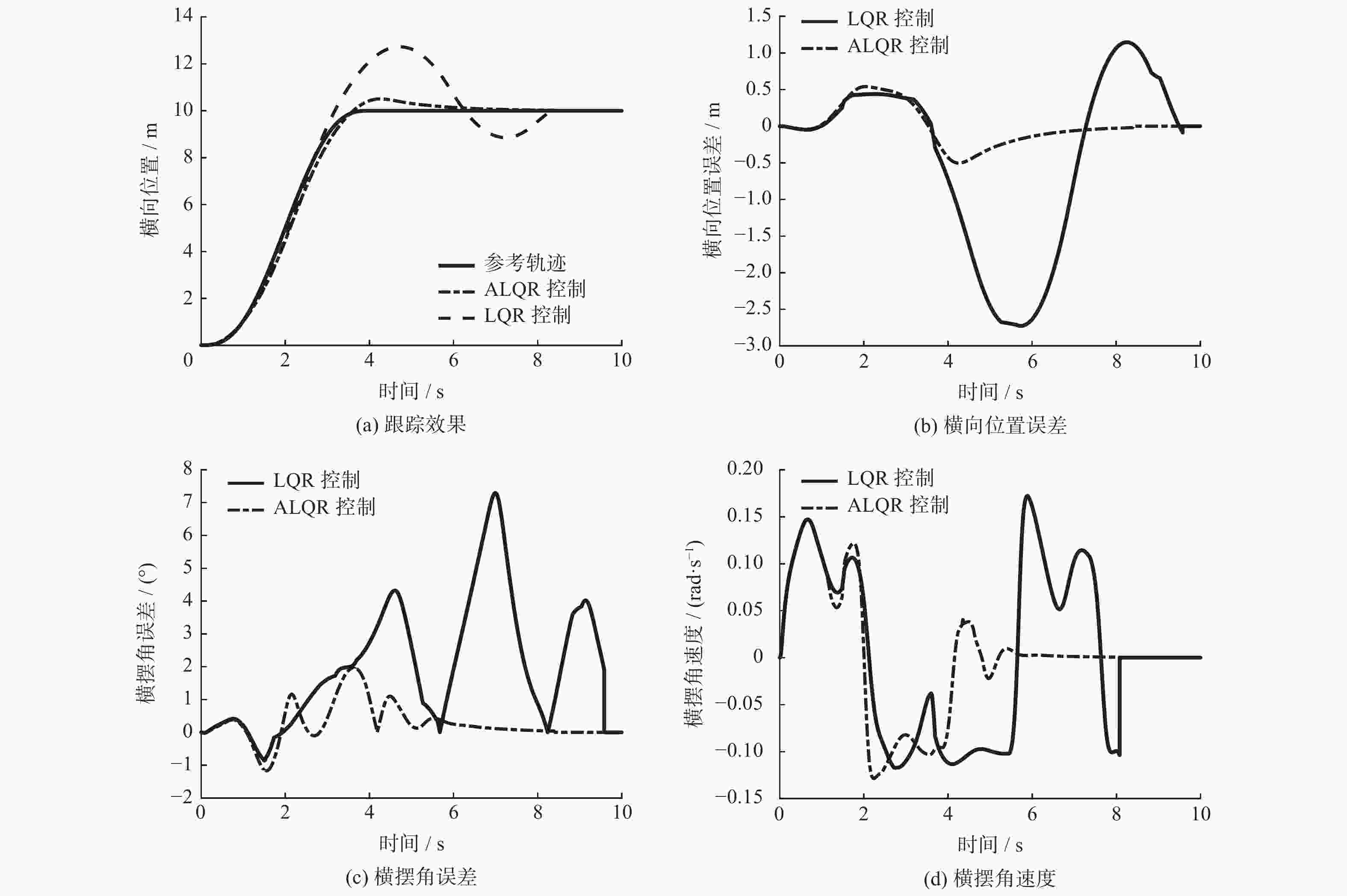
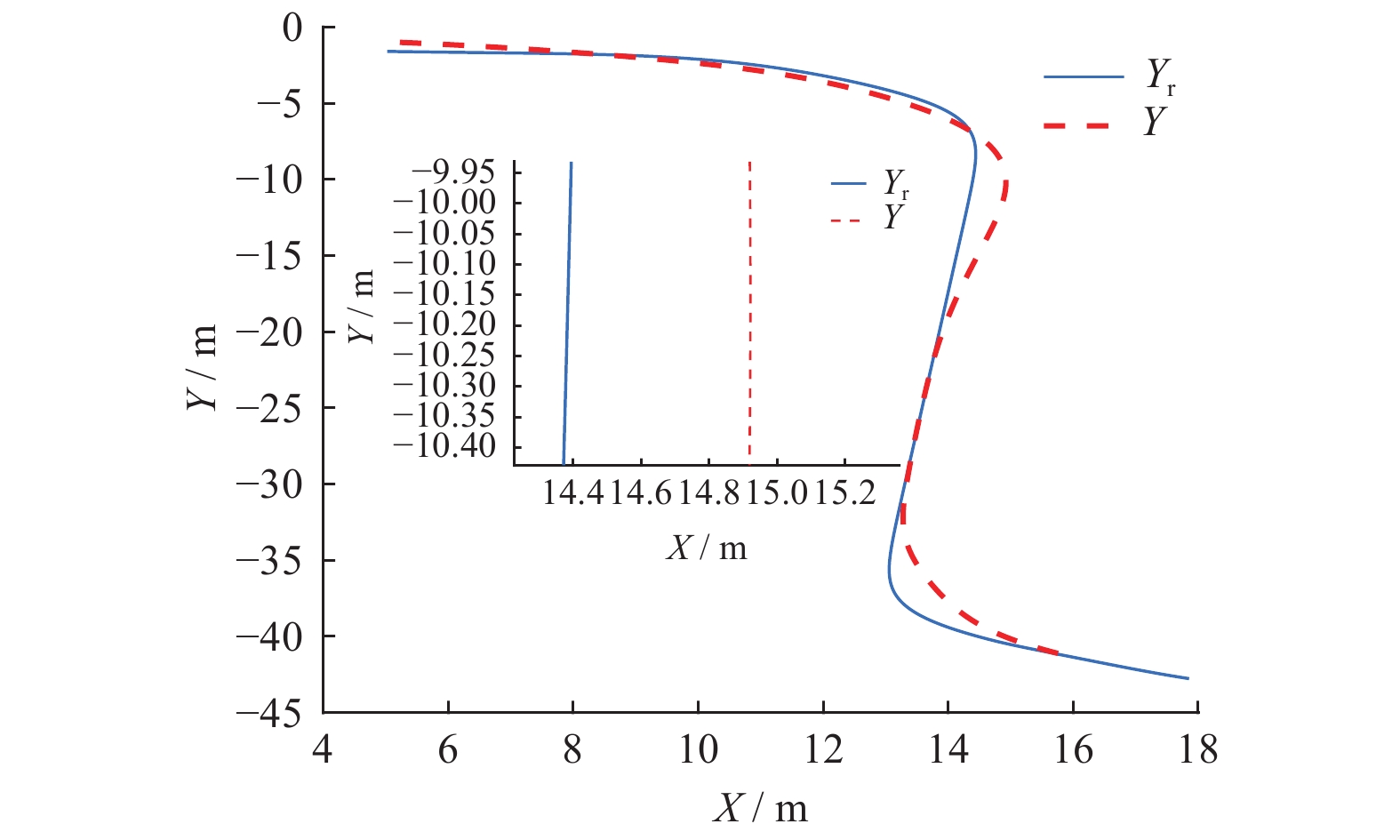
图 6 低附着工况90 km/h控制效果对比
Figure 6. Comparison of 90 km/h control effect under low adhesion condition
表 1 整车参数
Table 1. Vehicle parameters
参数 数值 整车质量m/kg
轴距l/m
汽车的转动惯量Iz/( kg∙m2)
质心到前轴的距离a/m
质心到后轴的距离b/m1865
2.7
4175
1.232
1.468 下载: 导出CSV
下载: 导出CSV
表 2 车速72 km/h跟踪误差
Table 2. Vehicle speed 72 km/h tracking error
控制器 峰值横向位置
误差/m峰值横摆角
误差/(°)ALQR 0.0517 0.2235 LQR 0.0559 0.2340 误差降低/% 7.5 4.5
下载: 导出CSV
表 3 低附着工况跟踪误差
Table 3. Tracking error under low adhesion condition
控制器 峰值横向位置
误差/m峰值横摆角
误差/(°)ALQR 0.5045 1.9675 LQR 2.7265 7.2911 误差降低/% 81.5 73.0
下载: 导出CSV
-
[1] 高昌平, 毕仕强, 蔡沈卫. 世界汽车工业的崛起与发展研究[J] . 产业与科技论坛,2020,19(15):77 − 78. doi: 10.3969/j.issn.1673-5641.2020.15.038 [2] 陈明伟, 袁晓华, 潘敏, 等. 从道路交通事故统计分析对比谈预防措施[J] . 中国安全科学学报,2004(8):62 − 66. [3] HUANG Y J, DING H T, ZHAG Y B, et al. A motion planning and tracking framework for autonomous vehicles based on artificial potential field elaborated resistance network approach[J] . IEEE Transactions on Industrial Electronics,2020,67(2):1376 − 1386. doi: 10.1109/TIE.2019.2898599 [4] TALVALAK L R, KRITAYAKIRANA K, GERDES J C. Pushing the limits: From lanekeeping to autonomous racing[J] . Annual Reviews in Control,2011,35(1):137 − 148. doi: 10.1016/j.arcontrol.2011.03.009 [5] YAO Q Q, TIAN Y, WANG Q, et al. Control strategies on path tracking for autonomous vehicle: State of the art and future challenges[J] . IEEE ACCESS,2020,8:161211 − 161222. doi: 10.1109/ACCESS.2020.3020075 [6] MARINO R, SCALZI S, NETTO M. Nested PID steering control for lane keeping in autonomous vehicles[J] . Control Engineering Practice,2011,19(12):1459 − 1467. doi: 10.1016/j.conengprac.2011.08.005 [7] 王占山, 王继东, 刘秀翀, 等. 二阶系统的复特征根对其鲁棒H∞控制性能的影响[J] . 东北大学学报(自然科学版),2019,40(9):1217 − 1221. [8] WANG P W, GAO S, LI L, et al. Automatic steering control strategy for unmanned vehicles based on robust backstepping sliding mode control theory[J] . IEEE ACCESS,2019,7:64984 − 64992. doi: 10.1109/ACCESS.2019.2917507 [9] 邓国红, 肖皓鑫, 韩龙海, 等. 基于模型预测控制的车辆横纵向跟踪控制[J] . 重庆理工大学学报(自然科学),2021,35(11):18 − 26. [10] 刘子龙, 杨汝清, 杨明, 等. 无人驾驶车辆横向位置最优跟踪控制[J] . 上海交通大学学报,2008,42(2):257 − 261, 265. [11] GOODRAZI A, SABOOTEH A, ESMAILZADEH E. Automatic path control based on integrated steering and external yaw-moment control[J] . Proceedings of the Institution of Mechanical Engineers Part K: Journal of Multi-body Dynamics,2008,222(2):189 − 200. doi: 10.1243/14644193JMBD120 [12] 高琳琳, 唐风敏, 郭蓬, 等. 自动驾驶横向运动控制的改进LQR方法研究[J] . 机械科学与技术,2021,40(3):435 − 441. [13] 倪兰青, 林棻. 基于预瞄的智能车辆路径跟踪控制研究[J] . 重庆理工大学学报(自然科学版),2017,31(3):27 − 33. [14] YANG T, BAI Z, LI Z, et al. Intelligent vehicle lateral control method based on feedforward + predictive LQR algorithm[J] . Actuators,2021,10(9):228. doi: 10.3390/act10090228 [15] PARK M, KANG Y. Experimental verification of a drift controller for autonomous vehicle tracking: A circular trajectory using LQR method[J] . International Journal of Control, Automation and Systems,2020,19(1):404 − 416. [16] YUE M, AN C, SUN J. Zero dynamics stabilisation and adaptive trajectory tracking for WIP vehicles through feedback linearisation and LQR technique[J] . International Journal of Control,2016,89(12):2533 − 2542. doi: 10.1080/00207179.2016.1169440 [17] YU H, ZHAO C, LI S, et al. Pre-work for the birth of driver-less scraper (LHD) in the underground mine: The path tracking control based on an LQR controller and algorithms comparison[J] . Sensors (Basel),2021,21(23):7839. doi: 10.3390/s21237839 [18] LICHOTA P, DUL F, KARBOWSKI A. System identification and LQR controller design with incomplete state observation for aircraft trajectory tracking[J] . Energies,2020,13(20):5354. doi: 10.3390/en13205354 [19] SINELKHATEM A, NACI E S. Robust LQR and LQR-PI control strategies based on adaptive weighting matrix selection for a UAV position and attitude tracking control[J] . Alexandria Engineering Journal,2022,61(8):6275 − 6292. doi: 10.1016/j.aej.2021.11.057 [20] 梁忠超, 张欢, 赵晶, 等. 基于自适应MPC的无人驾驶车辆轨迹跟踪控制[J] . 东北大学学报(自然科学版),2020,41(6):835 − 840. doi: 10.12068/j.issn.1005-3026.2020.06.013 [21] 孙忠廷, 柏建军, 陈炳旭, 等. 轮式移动机器人自适应轨迹跟踪控制[J] . 控制工程,2021,28(12):2420 − 2425. [22] REN Y, ZHAO Z, K C, et al. Adaptive fuzzy control for an uncertain axially moving slung-load cable system of a hovering helicopter with actuator fault[J] . IEEE Transactions on Fuzzy Systems,2022,61(8):6275 − 6292. [23] WU Y X, HUANG R, LI X, et al. Adaptive neural network control of uncertain robotic manipulators with external disturbance and time-varying output constraints[J] . Neurocomputing,2019,323:108 − 116. doi: 10.1016/j.neucom.2018.09.072 [24] LIU L, LIU Y J, LI D, et al. Barrier lyapunov function-based adaptive fuzzy FTC for switched systems and its applications to resistance-inductance-capacitance circuit system[J] . IEEE Transactions on Cybernetics,2020,50(8):3491 − 3502. doi: 10.1109/TCYB.2019.2931770 [25] 杨亮, 陈勇, 刘治. 基于参数不确定机械臂系统的自适应轨迹跟踪控制[J] . 控制与决策,2019,34(11):2485 − 2490. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 781
- HTML全文浏览量: 1006
- PDF下载量: 103
- 被引次数: 0
