

Research on vehicle location of improved point cloud matching algorithm with laser odometer
-
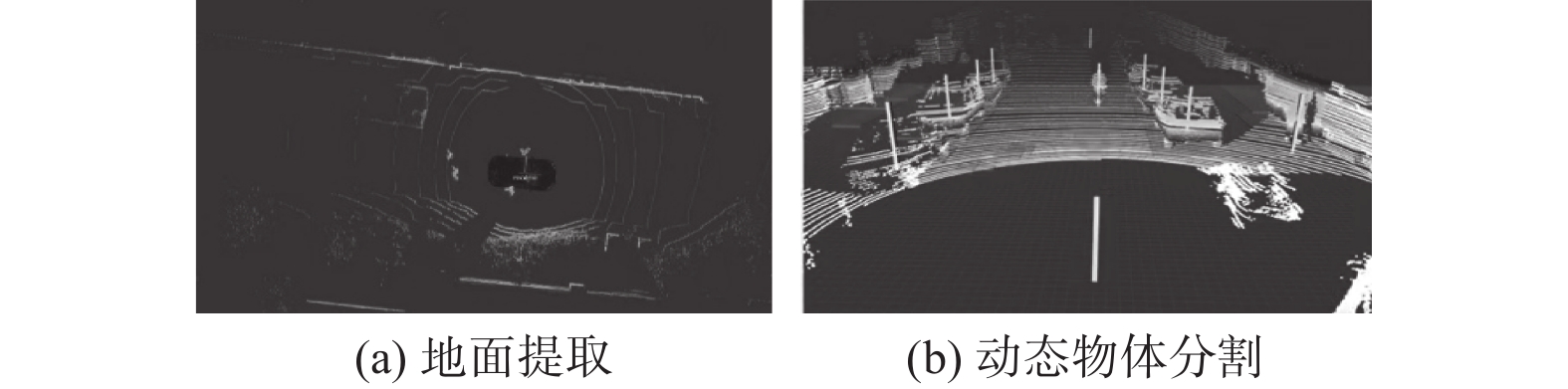
摘要: 针对传统迭代最近点(ICP)算法在点云配准过程中依赖于初始位置、匹配时间长、匹配精度差等问题,提出一种激光里程计改进点云配准算法的车辆定位方法。首先,在点云预处理方面对点云进行有序化和畸变点云补偿处理;然后,对点云动态特征点去除后进行静态特征点的稳定提取;最后,在点云配准过程中先对点云进行粗配准以减少点云对初始位置的依赖,接着提出双向k维树改进ICP算法进行点云精配准。通过KITTI数据集和自动驾驶小车平台进行试验测试分析,结果表明,改进点云配准算法相比于传统ICP算法有更快的匹配速度和精准度,里程计累积轨迹误差小。Abstract: Aiming at the problems that traditional iterative closest point (ICP) algorithm depends on initial position, long matching time and poor matching accuracy in the process of point cloud matching, a vehicle location method based on laser odometry improved point cloud registration algorithm was proposed. Firstly, point clouds were ordered and distorted point clouds were compensated in point cloud preprocessing. Then the static feature points were extracted stably after removing the dynamic feature points of the point cloud. Finally, in the process of point cloud registration, the point cloud was coarse registered to reduce the dependence of point cloud on the initial position, and then the bidirectional k-dimensional tree ICP algorithm was proposed for point cloud precise registration. Through the open source KITTI dataset and self-driving car platform for experimental test and analysis, the results show that compared with the traditional algorithm, the improved point cloud registration algorithm has faster matching speed and accuracy, small cumulative error of odometer trajectory.
-
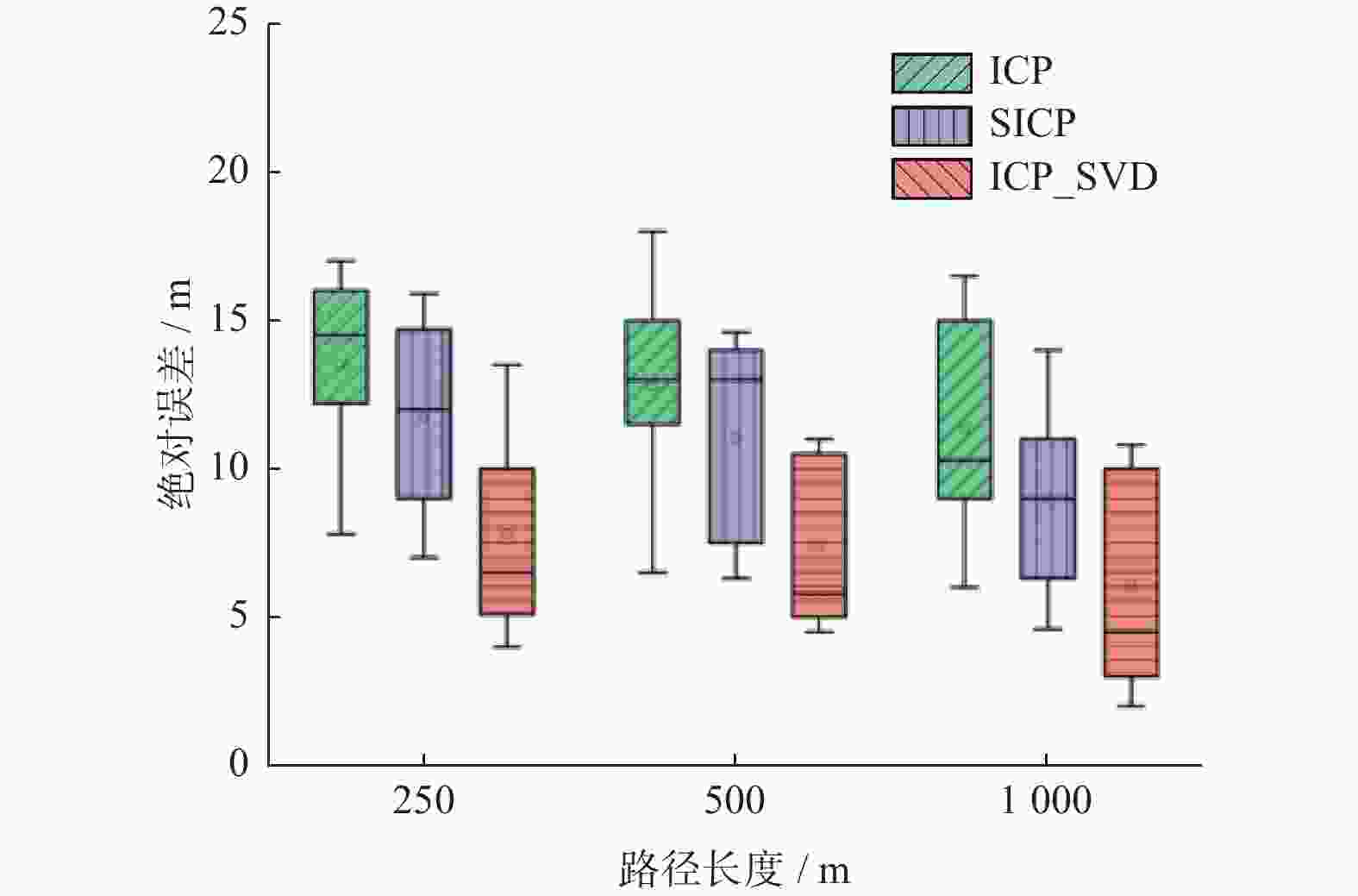
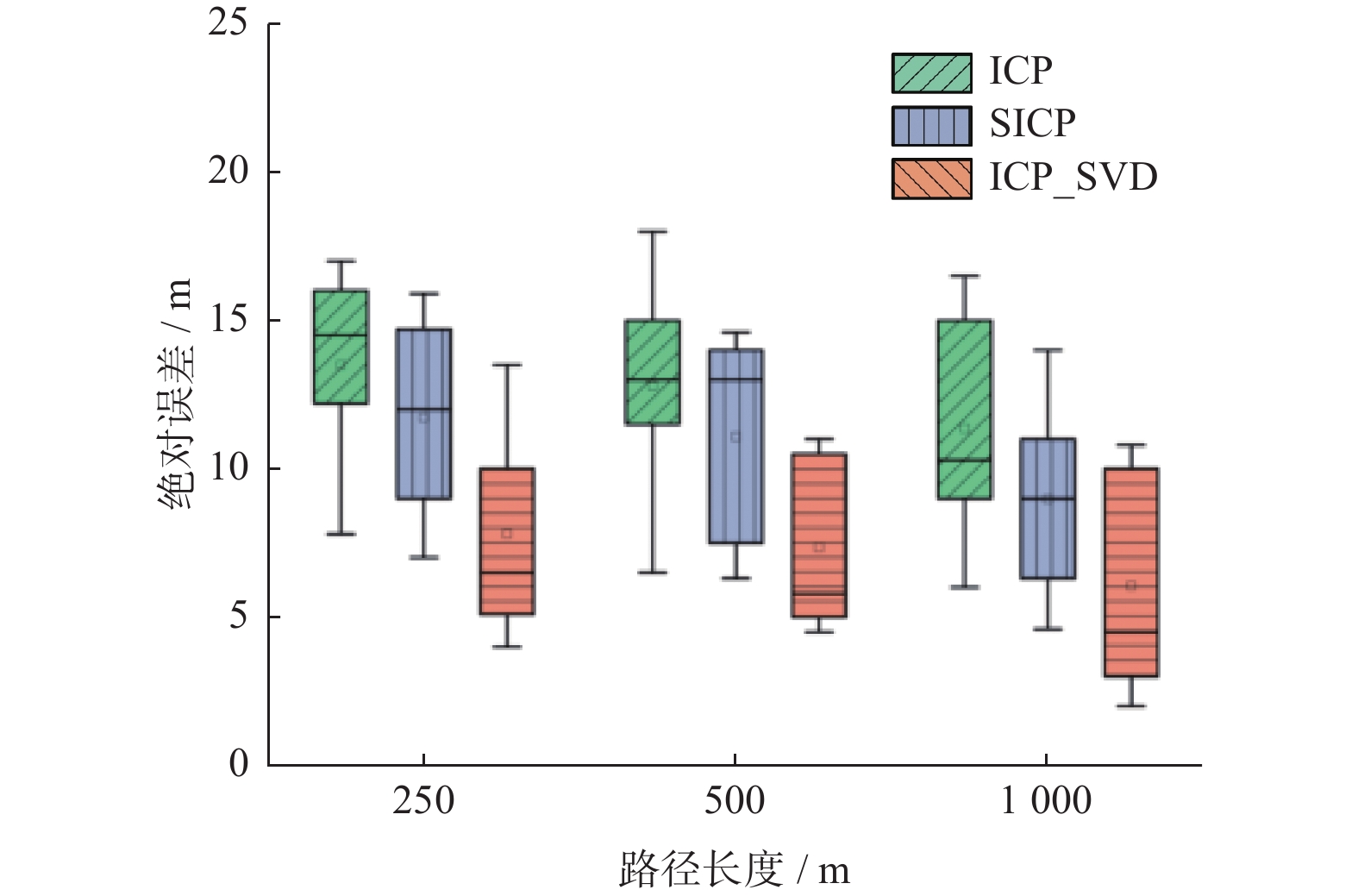
图 4 算法在多路径长度下轨迹的绝对误差
Figure 4. Absolute error of algorithm trajectory under multipath length
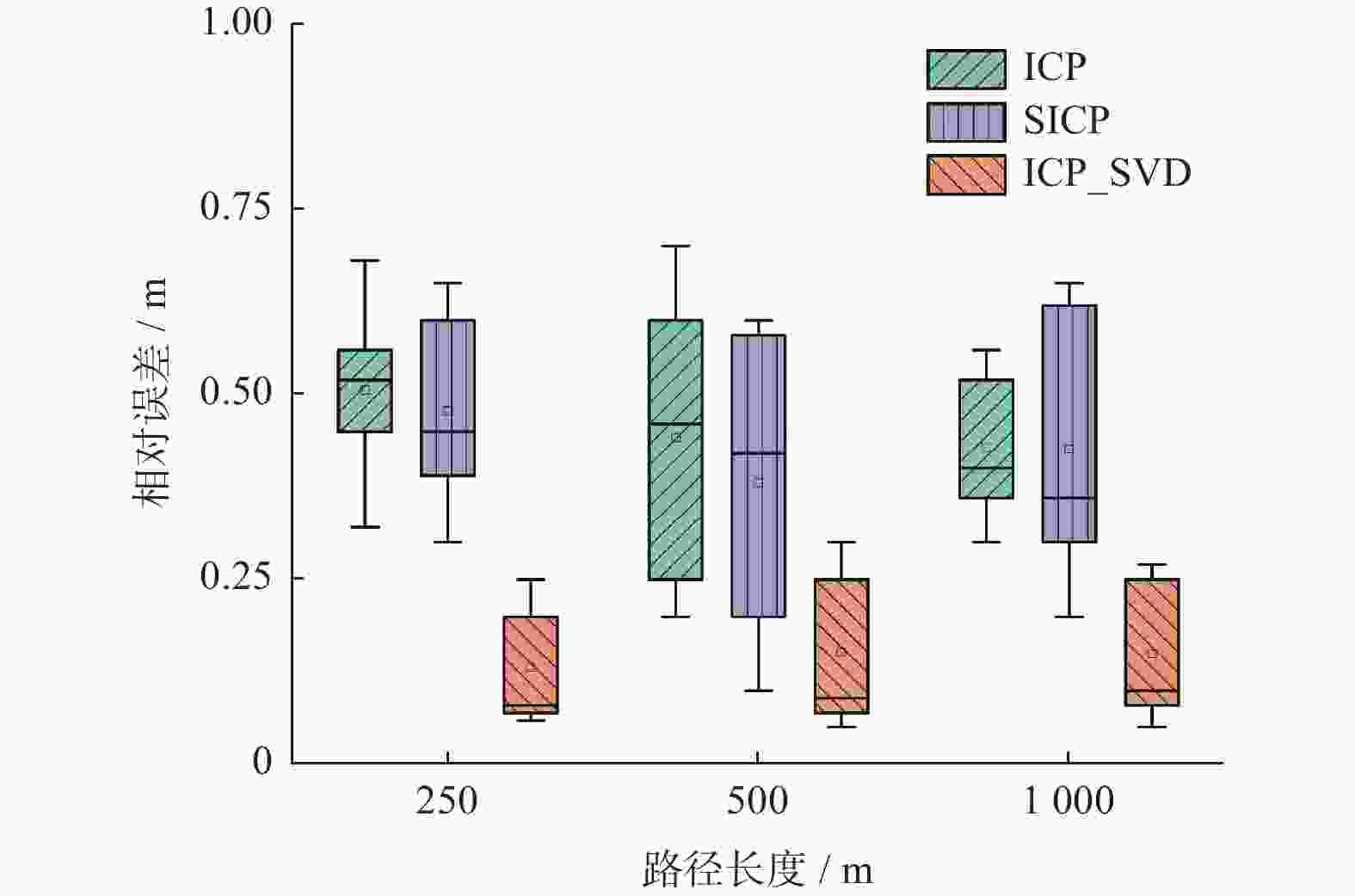
图 5 算法在多路径长度下轨迹的相对误差
Figure 5. Relative error of algorithm trajectory under multipath length
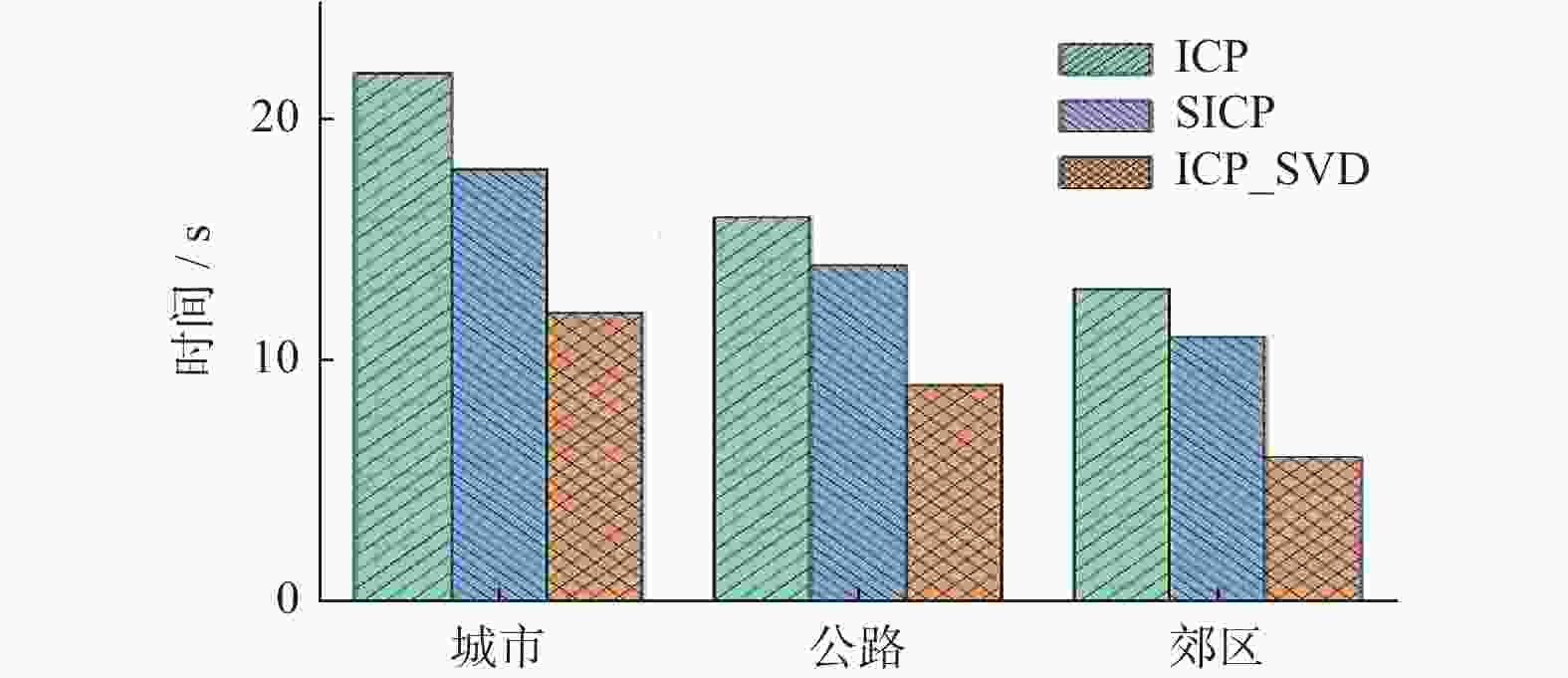
图 6 多场景下不同算法运行时间对比
Figure 6. Comparison of runtimes of different algorithm in multiple scenarios
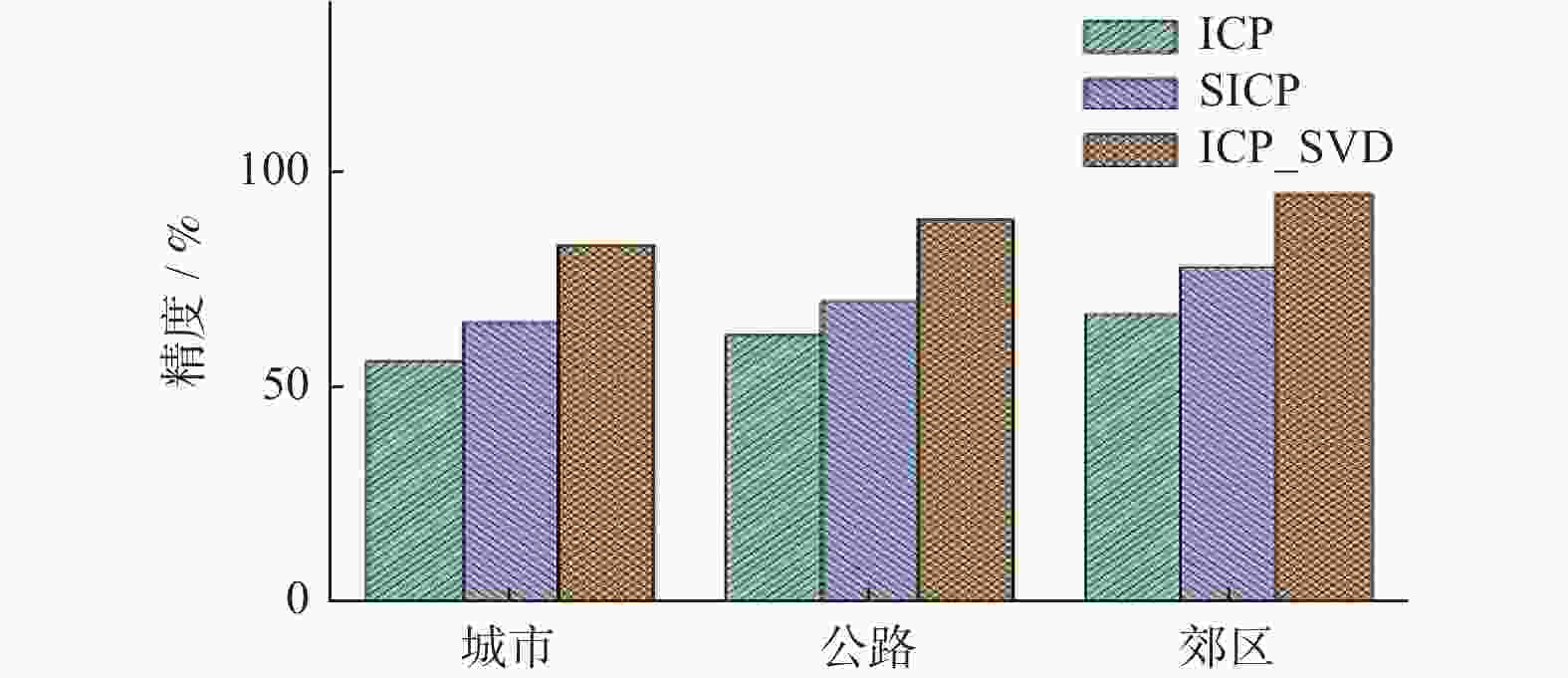
图 7 多场景下不同算法精度对比
Figure 7. Comparison of accuracy of different algorithms in multiple scenarios
表 1 消融试验
Table 1. Ablation experiment
模块 点云预处理 去除动态特征点 静态特征点提取 粗配准 精配准 配准时间 点云重合率/% RMSE(R) RMSE(t) (1) √ 0.0234 65 4.972 0.523 (2) √ √ 0.0192 74 4,646 0.436 (3) √ √ √ 0.0175 82 4.478 0.401 (4) √ √ √ √ 0.0133 89 3.924 0.382 (5) √ √ √ √ √ 0.0107 96 3.510 0.365  下载: 导出CSV
下载: 导出CSV
表 2 两种算法试验数据对比
Table 2. Comparison of experimental data of two algorithms
算法 点云重合数 均方根误差 匹配精度 传统ICP算法 10879 1.12e−6 0.75 改进点云算法 16967 0.78e−6 0.92
下载: 导出CSV
-
[1] HE K, GKIOXARI G, DOLLAR P, et al. Mask R-CNN[C]//Proceedings of the IEEE International Conference on Computer Vision. Venice: IEEE Computer Society, 2017: 2961−2966. [2] POUDEL R P, BONDE U, LIWICKI S, et al. Infrastructure-free hierarchical mobile robot global localization in repetitive environments[J] . IEEE Transactions on Instrumentation and Measurement,2021,4(9):1568 − 1575. [3] 胡玉文, 龚建伟, 姜岩, 等. 基于子地图的智能车辆同步定位与地图创建[J] . 汽车工程,2015,37(2):224 − 229. doi: 10.19562/j.chinasae.qcgc.2015.02.018 [4] DAVAK G. Robust moving object detection based on fusing tanassove Intuitionistic 3D Fuzzy Histon Roughness Index and texture features[J] . International Journal of Approximate Reasoning,2021,4(56):135 − 143. [5] BESL P J, MCKAY N D. A method for registration of 3-D shapes[J] . IEEE Transactions on Pattern Analysis and Machin Intelligence,2022,14(2):239 − 256. [6] SUJYH. L, SHJK K. Tree point clouds registration using an improved ICP algorithm based on kd-tree[C]//Proceedings of 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS). Beijing: IEEE, 2016: 4545−4548. [7] CIM S, TAO L. Improved iterative closest point(ICP)3D point cloud registration algorithm based on point cloud filtering and adaptive fireworks for coarse registration[J] . International Journal of Remote Sensing,2019,37(11):3197 − 3220. [8] 郑立华, 麦春艳, 廖崴, 等. 基于Kinect相机的苹果树三维点云配准[J] . 农业机械学报,2016,47(5):9 − 14. [9] JIANG C, JOB J H, XHEK K C, et al. Registration for 3D point cloud using angular-invariant feature Neuro computing[J] . IEEE Access,2020,8(56):3839 − 3844. [10] CHEN H, BOJK B, HAN K, el at. 3D free-form object recognition in range images using local surface patches[J] . Pattern Recognit,2022,9(124):1252 − 1262. [11] MA G Q, LIU L L, YUK Z, et al. Aplication and development of three-dimensional profile measurement for largeand complex surface[J] . Chinese Optics,2019,12(2):214 − 228. doi: 10.3788/co.20191202.0214 [12] LIU J X, ZHANG G, LI P, et al. ICP three-dimensional point cloud registration based on KD tree optimization[J] . Engineering of Surveying and Mapping,2020,25(6):15 − 18. [13] GREE M. Approximate K-D free search for efficient ICP[J] . Digital Imaging and Modeling,2013,8(114):442 − 448. [14] 李仁忠. 基于ISS特征点结合改进ICP的点云配准算法[J] . 激光与光电子学,2017,54(11):312 − 319. [15] 张涛, 张晨, 魏宏宇, 等. 动态环境下融合激光雷达和IMU的激光里程计设计[J] . 导航定位与授时,2022,4(25):1602 − 1610. [16] 李永锋, 张国良, 徐君, 等. 基于Kinect的帧间配准改进ICP算法[J] . 电光与控制,2016,23(2):56 − 60. doi: 10.3969/j.issn.1671-637X.2016.02.012 -

 下载:
下载:







 点击查看大图
点击查看大图

计量
- 文章访问数: 1686
- HTML全文浏览量: 397
- PDF下载量: 395
- 被引次数: 0
