

Asynchronous sliding mode control for Markovian jumping systems in finite-time intervals
-
摘要: 针对马尔科夫跳变系统,讨论有限时间区间内异步滑模控制及其有限时间有界问题. 针对系统存在状态不可测的非同步现象,基于隐马尔科夫模型,设计了模式相关滑模控制器,使得系统状态轨迹在规定的有限时间内被驱动到滑模面上. 采用有限时间分析法,得到滑模动力学在到达阶段和滑动运动阶段的有限时间有界准则,获得异步控制器增益矩阵解的充分条件. 最后,通过单连杆机器人手臂模型证明所得结果的有效性.Abstract: The problem of asynchronous sliding mode control in finite-time intervals was studied for Markovian jumping systems. A mode-dependent sliding mode surface function was designed based on the hidden Markov model for the unmeasurable non-synchronization phenomenon. A sliding mode controller was designed to drive the state trajectory of the system to the specified sliding mode surface in a specified finite-time. Through the finite-time analysis method, the finite-time boundedness criterion of sliding mode dynamics in the arrival stage and sliding motion stage was gained, sufficient conditions for the solution of the asynchronous controller gain matrix were obtained. Finally, a single-link robot arm model was used to demonstrate the effectiveness of the results.
-
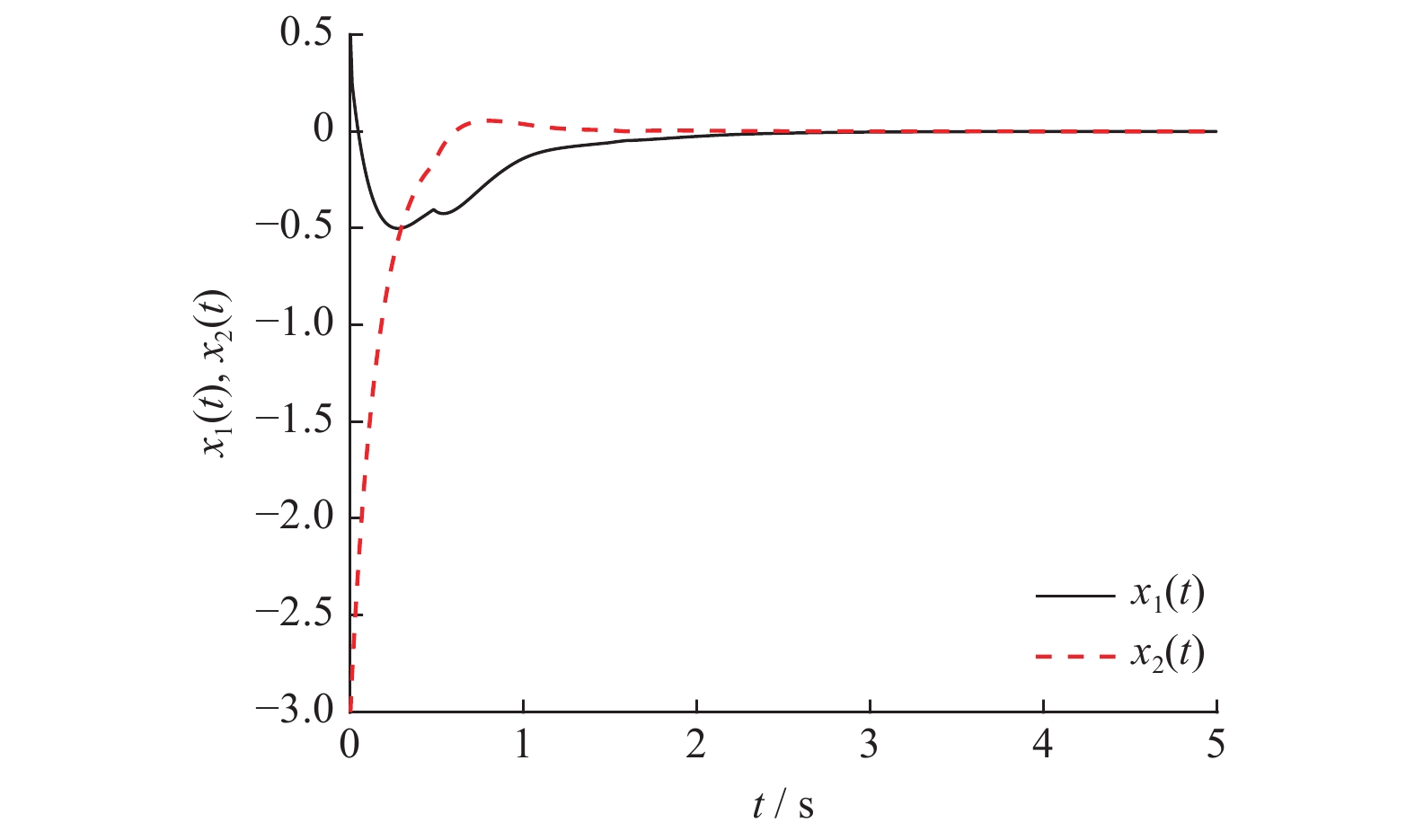
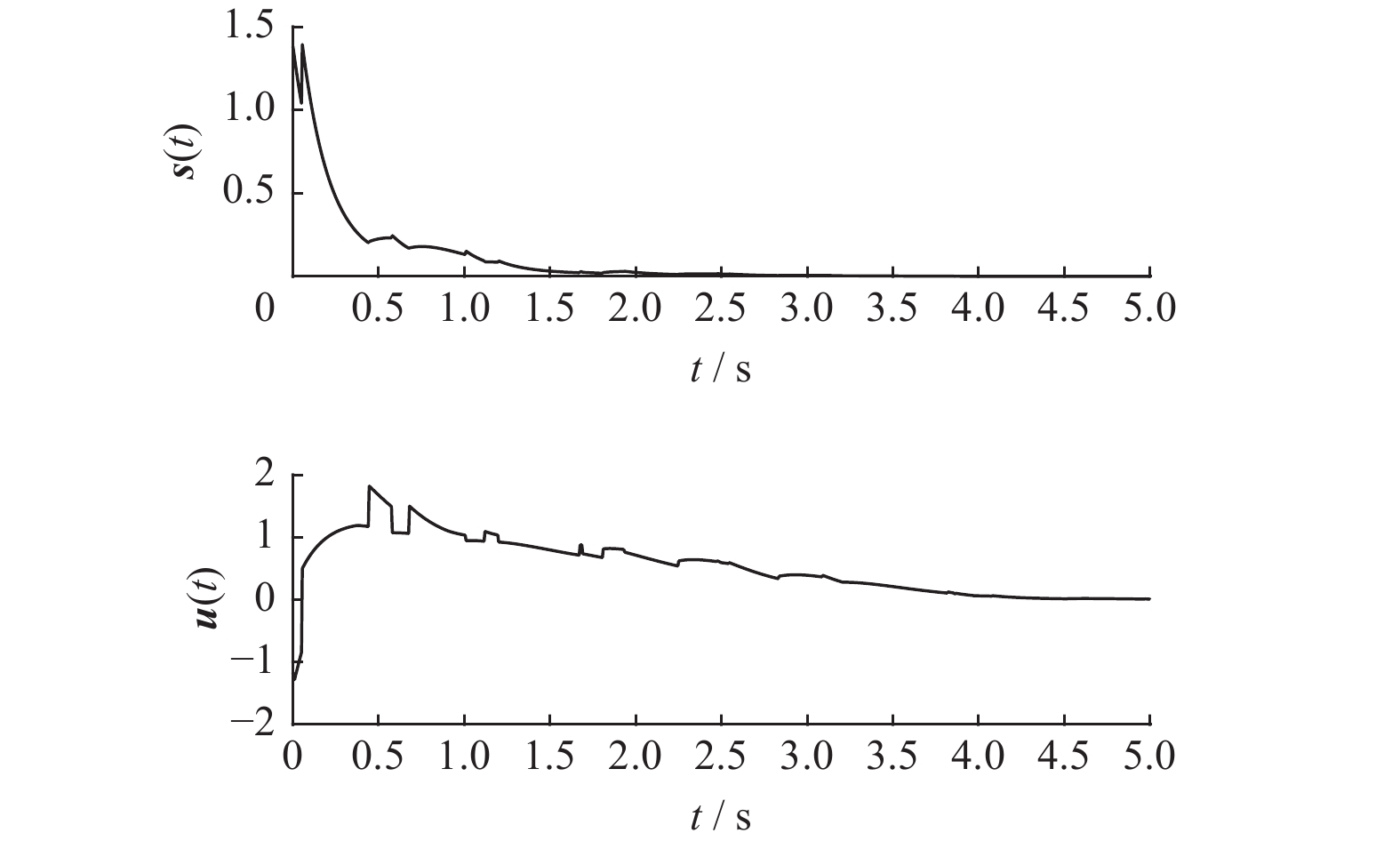
图 4 带有控制器
${\boldsymbol{u}}(t)$ 的系统响应曲线Figure 4. System response curve with
${\boldsymbol{u}}(t)$ 
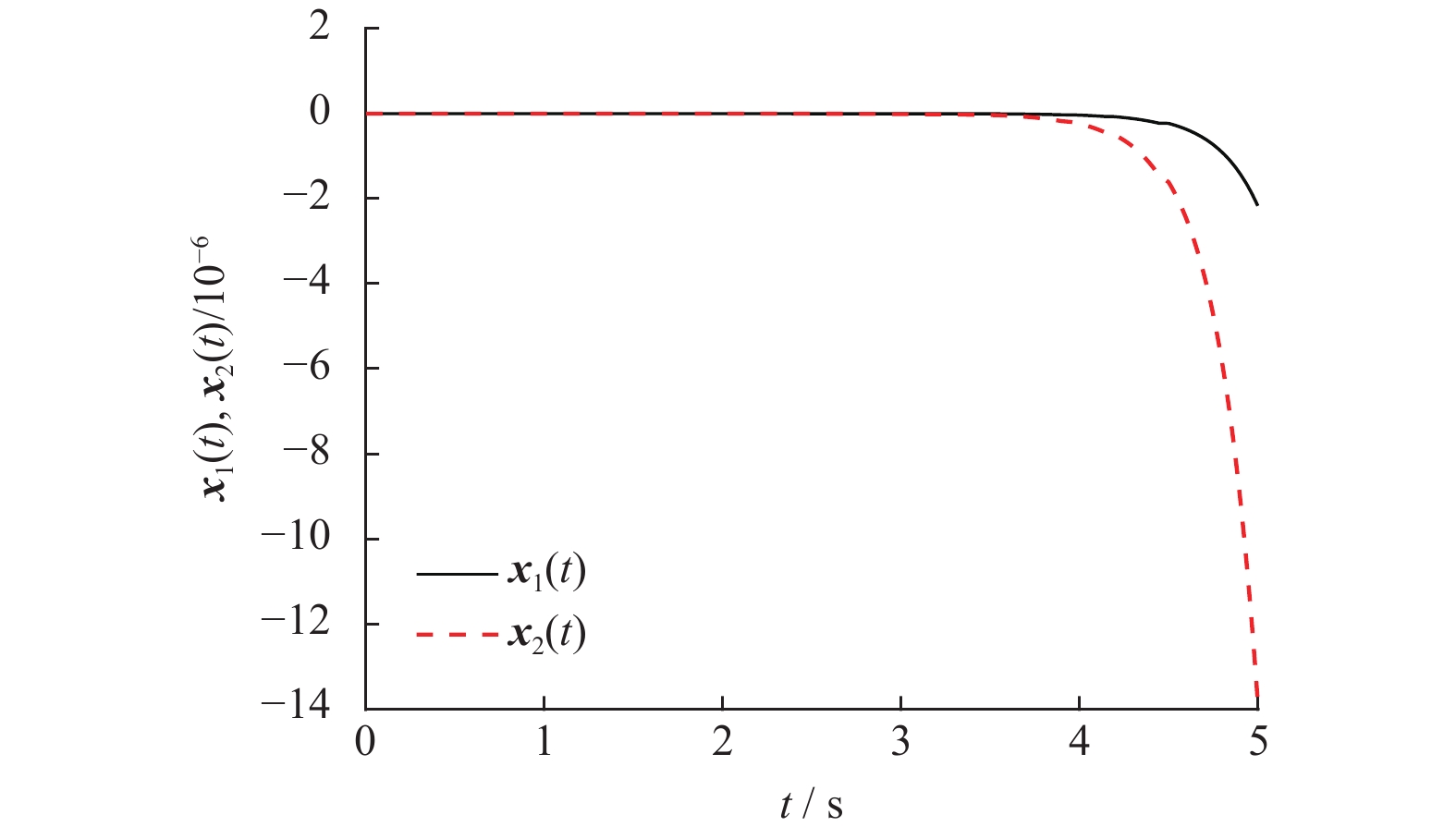
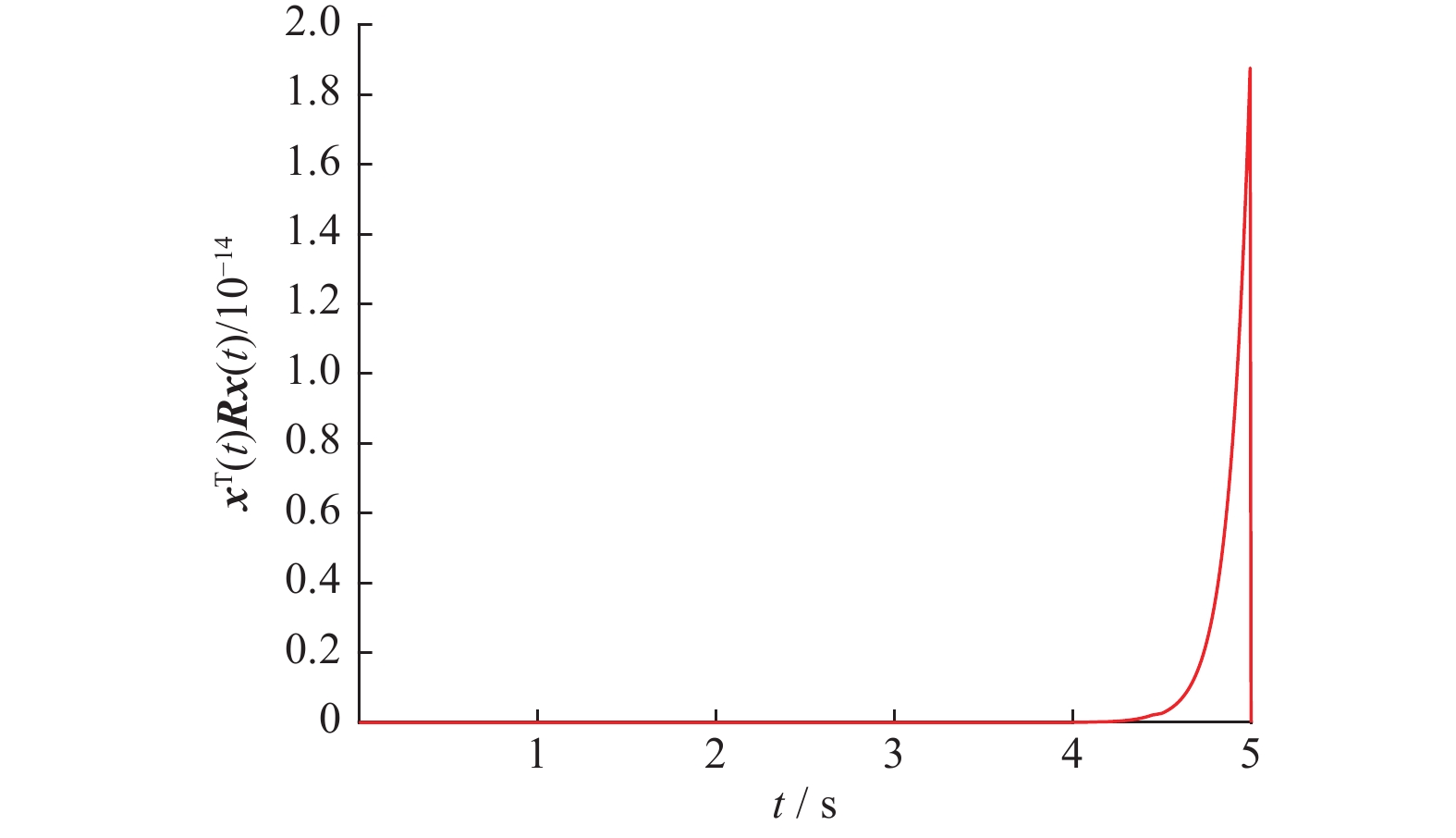
图 5 不带有控制器加权函数
${{\boldsymbol{x}}^{\rm{T}}}(t){\boldsymbol{R}}{\boldsymbol{x}}(t)$ 的变化曲线Figure 5. Curve of state function
${{\boldsymbol{x}}^{\rm{T}}}(t){\boldsymbol{R}}{\boldsymbol{x}}(t)$ without controller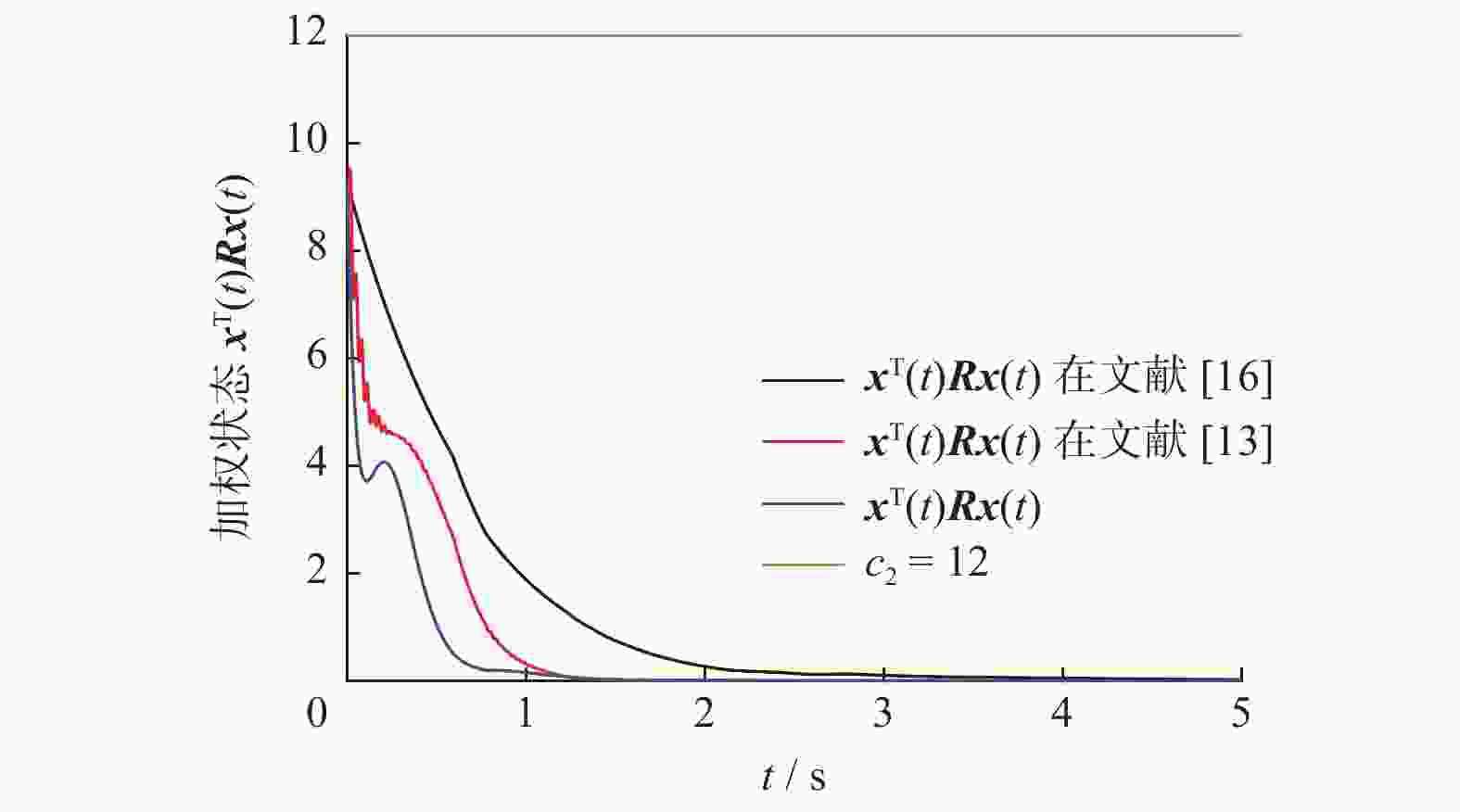
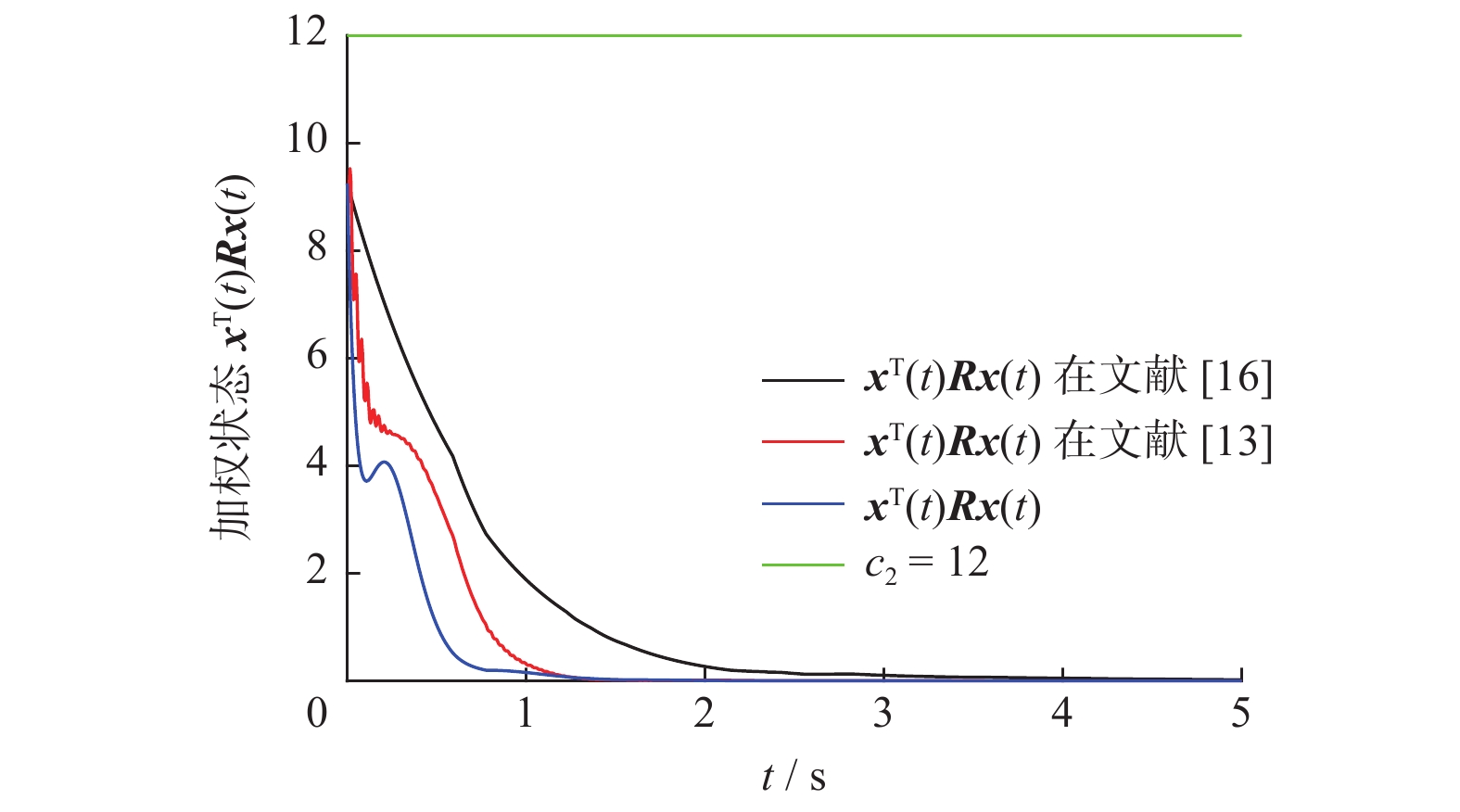
图 6 带有控制器加权函数
${{\boldsymbol{x}}^{\rm{T}}}(t){\boldsymbol{R}}{\boldsymbol{x}}(t)$ 的变化曲线Figure 6. Curves of state function
${{\boldsymbol{x}}^{\rm{T}}}(t){\boldsymbol{R}}{\boldsymbol{x}}(t)$ with controller -
[1] 徐洋, 徐松涛, 唐书娟, 等. 基于马尔可夫切换系统的固定时滞平滑算法[J] . 电光与控制,2014,21(9):45 − 48, 98. [2] 周子龙, 李晓航. 离散马尔可夫跳变系统的降维观测器设计[J] . 电光与控制,2022,29(4):77 − 82, 94. [3] 苏晓明, 石豪达, 包·阿迪亚, 等. 基于中间估计器的非线性广义马尔可夫跳变系统的故障估计[J] . 辽宁师范大学学报(自然科学版),2021,44(3):309 − 316. [4] WANG C, LI R, SU X. Output feedback sliding mode control of Markovian jump systems and its application to switched boost converter[J] . IEEE Transactions on Circuits and Systems I: Regular Papers,2021,68(12):5134 − 5144. doi: 10.1109/TCSI.2021.3113356 [5] 李研, 童东兵, 何德东, 等. 一类具有马尔科夫跳变的时滞神经网络的自适应估计[J] . 上海工程技术大学学报,2015,29(3):222 − 225. [6] ZHANG N, QI W, PARK J H, et al. Sliding mode control for discrete-time singular semi-Markovian jumping models[J] . Information Sciences,2023,624:554 − 566. doi: 10.1016/j.ins.2022.12.102 [7] 蒉秀惠, 王燕锋. 转移概率部分未知的网络化马尔科夫跳变系统镇[J] . 控制工程,2018,25(12):2279 − 2284. [8] CHENG J, PARK J H, WU Z G. Observer-based asynchronous control of nonlinear systems with dynamic event-based try-once-discard protocol[J] . IEEE Transactions on Cybernetics,2021,52(12):12638 − 12648. [9] XIE W, NGUANG S K, ZHU H, et al. A novel event-triggered asynchronous $ {H_\infty } $ control for T-S fuzzy Markov jump systems under hidden Markov switching topologies[J] . Fuzzy Sets and Systems,2022,443:258 − 282. doi: 10.1016/j.fss.2021.09.014[10] WANG Y, XU S, AHN C K. Almost sure finite-time control for Markovian jump systems under asynchronous switching with applications: a sliding mode approach[J] . IEEE Transactions on Circuits and Systems I: Regular Papers,2022,69(9):3726 − 3735. doi: 10.1109/TCSI.2022.3179438 [11] WANG J, RU T, XIA J, et al. Asynchronous event-triggered sliding mode control for semi-Markov jump systems within a finite-time interval[J] . IEEE Transactions on Circuits and Systems I: Regular Papers,2020,68(1):458 − 468. [12] FANG M, SHI P, DONG S. Sliding mode control for Markov jump systems with delays via asynchronous approach[J] . IEEE Transactions on Systems, Man, and Cybernetics: Systems,2019,51(5):2916 − 2925. [13] 林炜星, 李晓航. 基于高阶未知输入观测器的滑模控制[J] . 上海工程技术大学学报,2017,31(2):106 − 111. [14] 周生龙, 陈机林, 姜昭钰, 等. 随动负载模拟器小脑模型滑模控制[J] . 电光与控制,2021,28(12):52 − 56. [15] XU C, TONG D, CHEN Q, et al. Exponential stability of Markovian jumping systems via adaptive sliding mode control[J] . IEEE Transactions on Systems, Man, and Cybernetics: Systems,2021,51(2):954 − 964. doi: 10.1109/TSMC.2018.2884565 [16] WU L, SHI P, GAO H. State estimation and sliding-mode control of Markovian jump singular systems[J] . IEEE Transactions on Automatic Control,2010,55(5):1213 − 1219. doi: 10.1109/TAC.2010.2042234 [17] CAO Z, NIU Y, SONG J. Finite-time sliding-mode control of Markovian jump cyber-physical systems against randomly occurring injection attacks[J] . IEEE Transactions on Automatic Control,2019,65(3):1264 − 1271. [18] QI W, ZONG G, AHN C K. Input-output finite-time asynchronous SMC for nonlinear semi-Markov switching systems with application[J] . IEEE Transactions on Systems, Man, and Cybernetics: Systems,2022,52(8):5344 − 5353. doi: 10.1109/TSMC.2021.3122965 [19] NIE R, HE S, LIU F, et al. Sliding mode controller design for conic-type nonlinear semi-Markovian jumping systems of time-delayed Chua’s circuit[J] . IEEE Transactions on Systems, Man, and Cybernetics: Systems,2019,51(4):2467 − 2475. -

 下载:
下载:














 点击查看大图
点击查看大图

计量
- 文章访问数: 921
- HTML全文浏览量: 375
- PDF下载量: 106
- 被引次数: 0
