

Force feedback control for variable parameter vascular interventional surgery robot based on terminal sliding mode
-
摘要: 针对主从式血管介入手术机器人力反馈控制系统存在的变参数及外部扰动问题,提出一种含有连续函数特性的终端滑模控制方法。首先分别基于计算和力测量的方法对血管介入手术力反馈控制系统参数及其变化进行分析。然后在终端滑模控制方法的基础上,设计一种包含连续特性函数的终端滑模控制器,并使用Lyapunov稳定性分析方法,证明了控制器的稳定性。仿真验证表明,从跟踪效果和控制器输出两个角度分析,改进后的终端滑模控制方法不仅有效地抑制了抖振,还提高了信号的跟踪精度,证明了该策略在提升变参数系统稳定性和提升控制精度方面具有重要的应用价值。Abstract: Aiming at the problem of variable parameters and external disturbance in force feedback control system of master-slave vascular interventional surgery robot, a terminal sliding mode control method with continuous function characteristics was proposed. The parameters and changes of the force feedback control system of vascular interventional surgery were analyzed based on the calculation and force measurement methods. Then, a terminal sliding mode controller with continuous characteristic function was designed based on the terminal sliding mode control method, and the stability of the controller was proved by using the Lyapunov stability analysis method. Finally, simulation verification was carried out. It shows that from the two perspectives of tracking effect and controller output, the improved terminal sliding mode control method can not only effectively suppress chattering, but also improve the tracking accuracy of the signal, which proves that the strategy has important application value in improving the robustness and the control accuracy of variable parameter system.
-
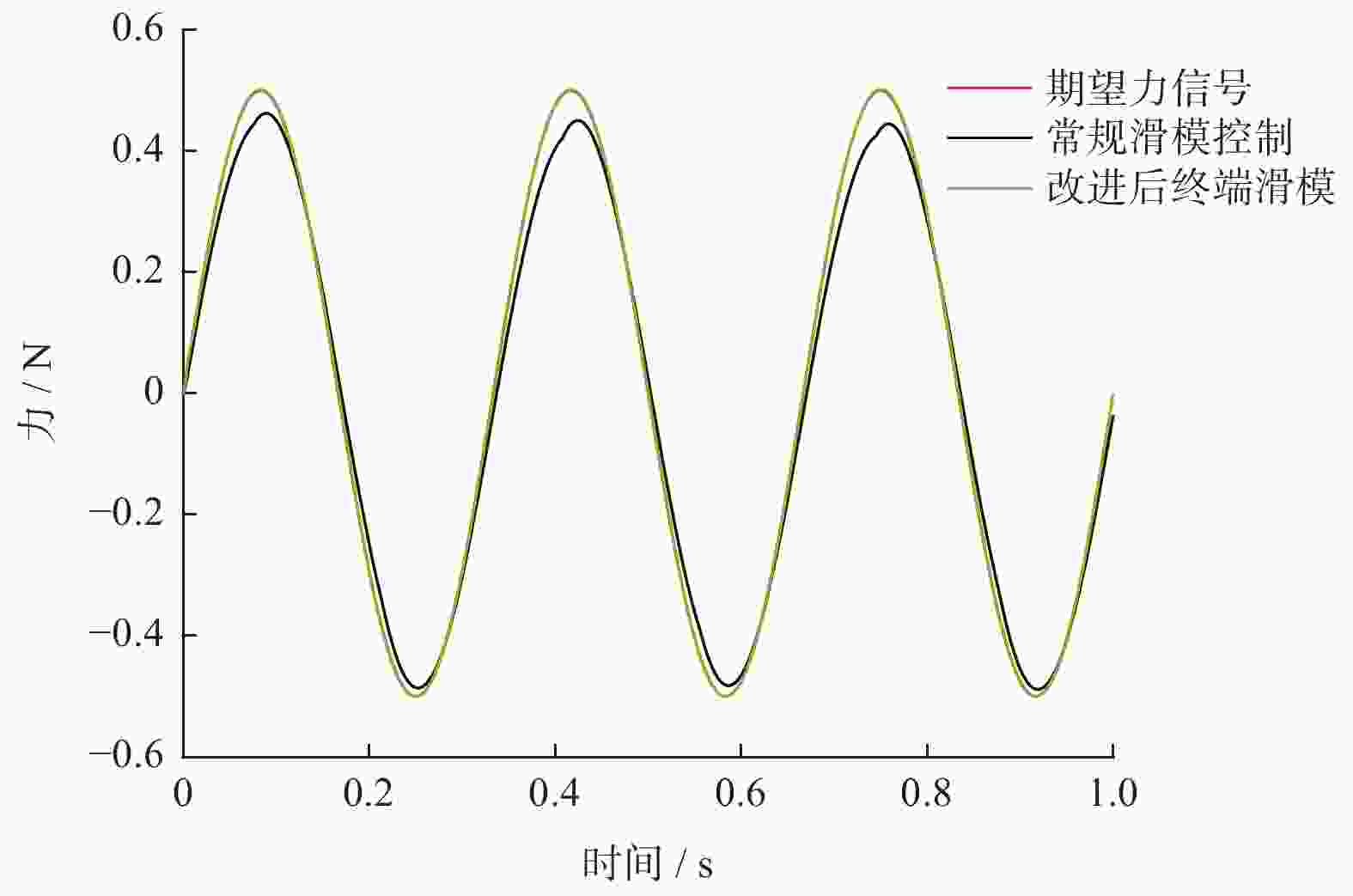
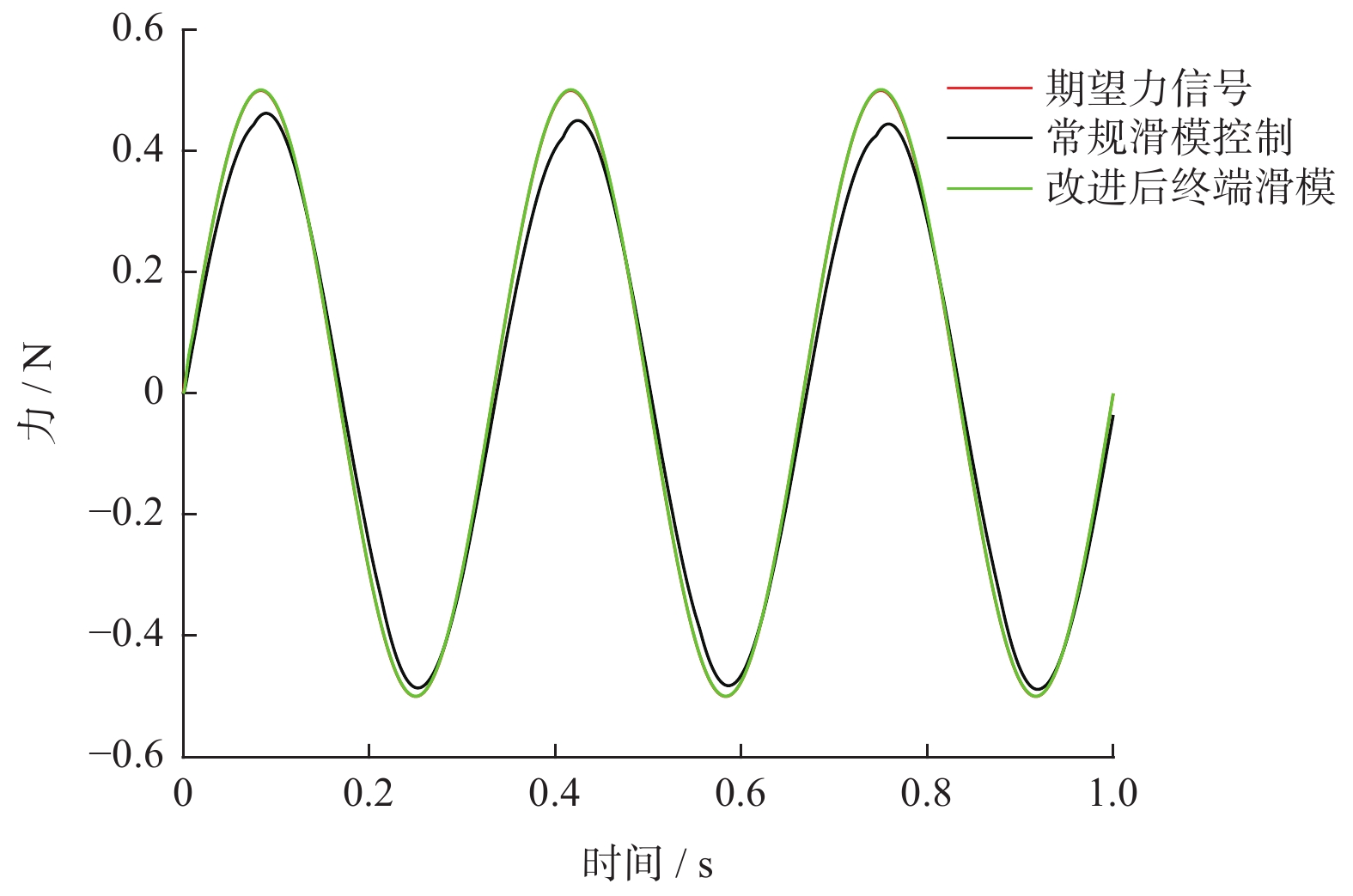
图 8 常规滑模和改进后终端滑模控制跟踪效果
Figure 8. Tracking effect of conventional sliding mode control and improved terminal sliding mode control
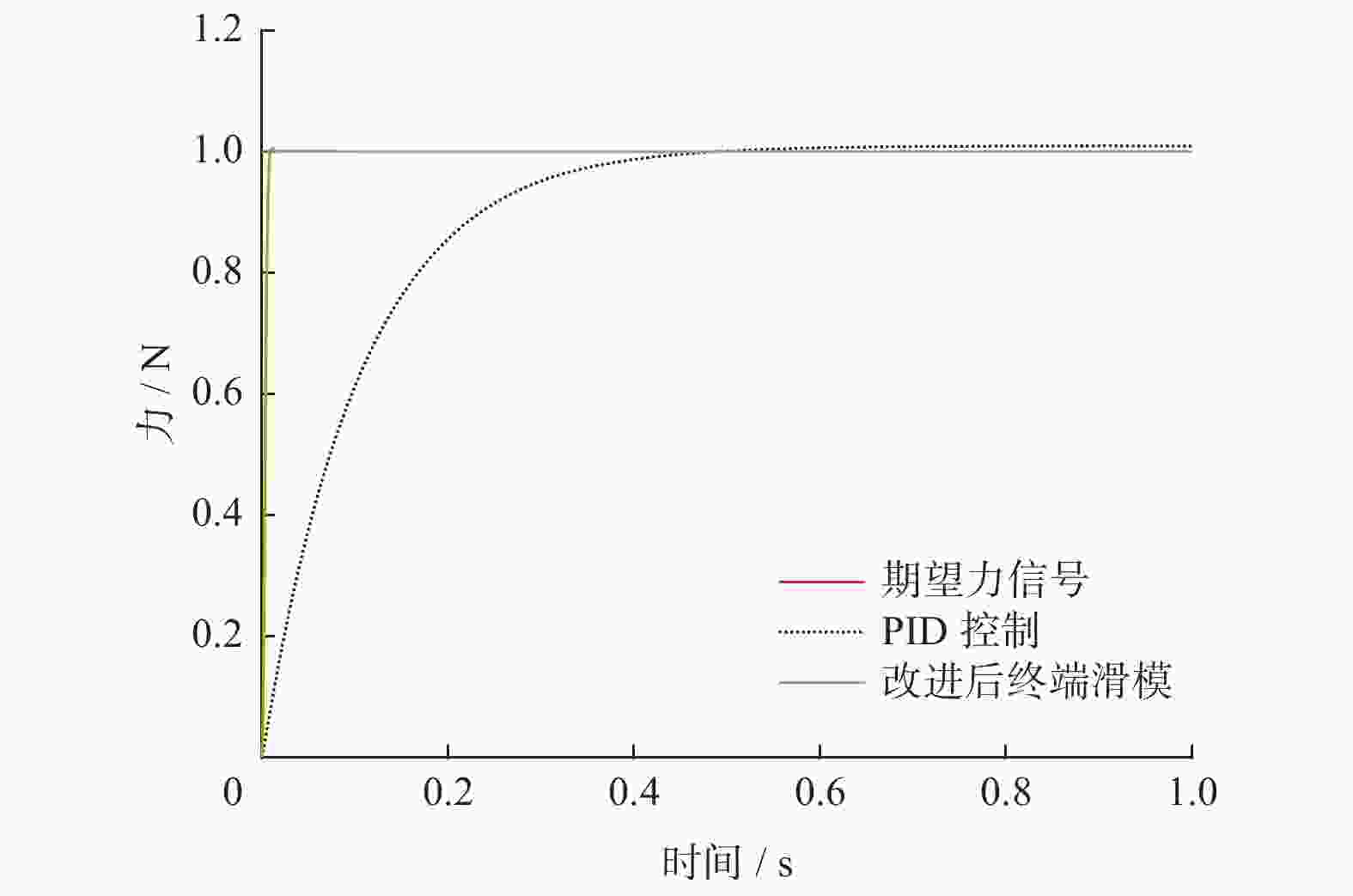
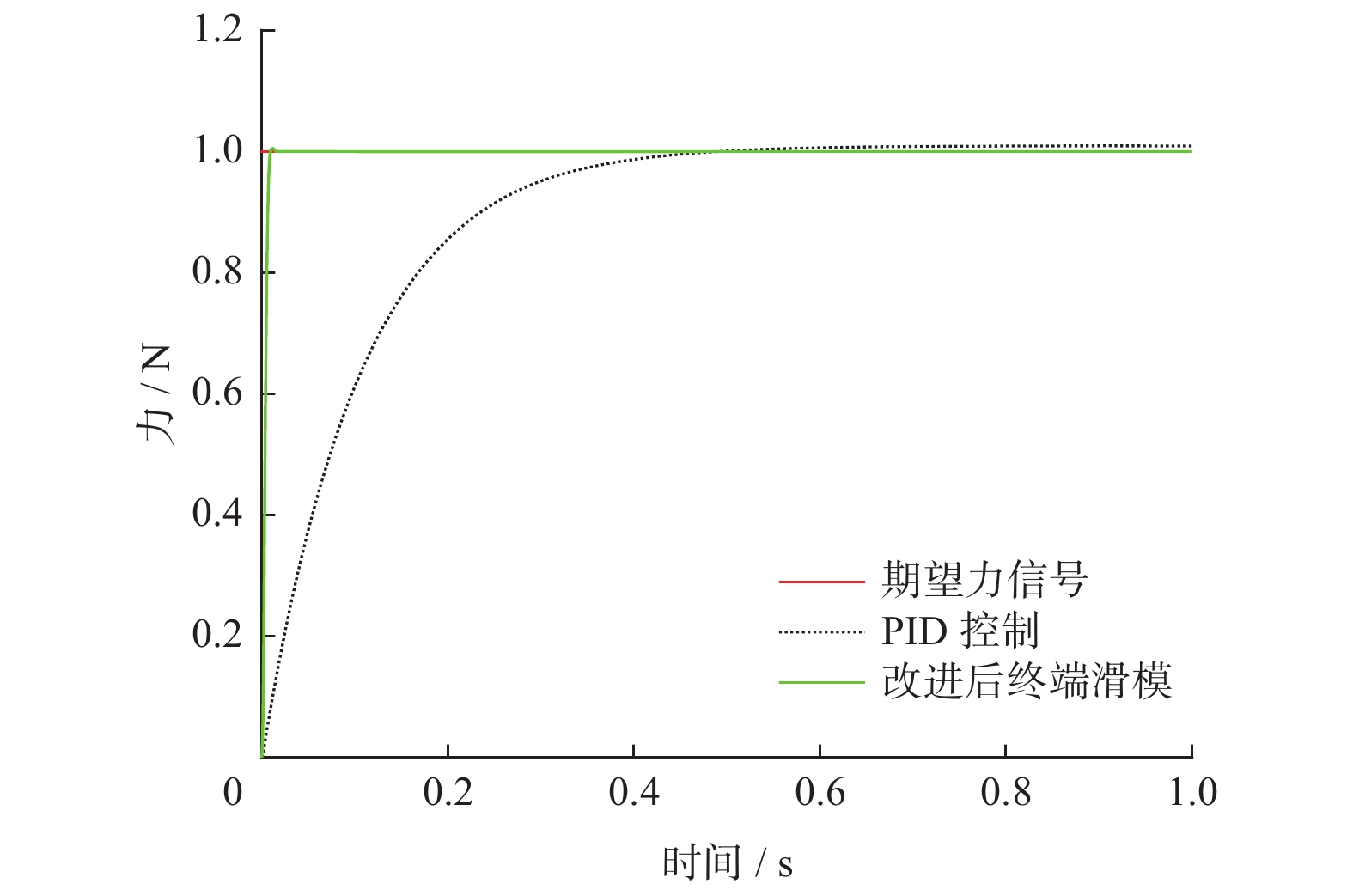
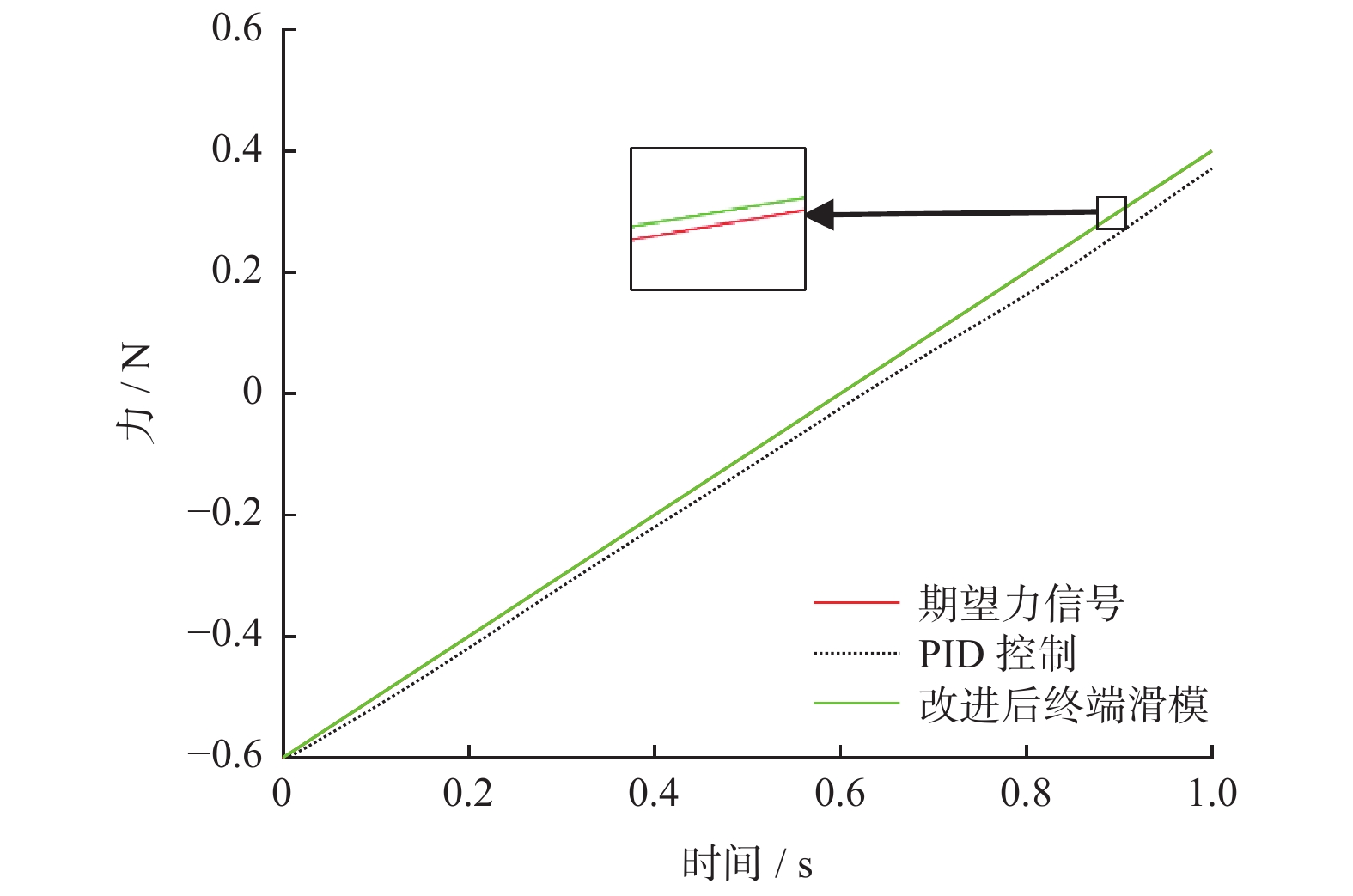
图 10 输入近似阶跃信号的PID控制和改进后终端滑模控制跟踪效果
Figure 10. Tracking effect of PID control and improved terminal sliding mode control when inputting step signal
-
[1] BAO X, GUO S, XIAO N, et al. A cooperation of catheters and guidewires-based novel remote-controlled vascular interventional robot[J] . Biomedical Microdevices,2018,20(20):2 − 19. doi: 10.1007/s10544-017-0241-9 [2] GUO S X, WANG Y, XIAO N, et al. Study on real-time force feedback for a master-slave interventional surgical robotic system[J] . Biomedical Microdevices,2018,20(37):2 − 10. doi: 10.1007/s10544-018-0278-4 [3] 袁雷, 肖飞, 沈建清, 等. 基于扰动观测器的不确定非线性系统非奇异终端滑模控制[J] . 控制与决策,2014,29(2):353 − 357. [4] 冒建亮, 李奇, 朱海荣. 一种连续非奇异快速终端滑模控制方法[J] . 控制与决策,2016,31(10):1873 − 1878. [5] REN C, LI X, YANG X, et al. Extended state observer-based sliding mode control of an omnidirectional mobile robot with friction compensation[J] . IEEE Transactions on Industrial Electronics,2019,66(12):9480 − 9489. doi: 10.1109/TIE.2019.2892678 [6] TRAN X T, OH H, KIM I R, et al. Attitude stabilization of flapping micro-air vehicles via an observer-based sliding mode control method[J] . Aerospace Science and Technology,2018,76:386 − 393. doi: 10.1016/j.ast.2018.01.045 [7] DEVIKA K B, THOMAS S. Sliding mode controller design for MIMO nonlinear systems: A novel power rate reaching law approach for improved performance[J] . Journal of the Franklin Institute,2018,355(12):5082 − 5098. doi: 10.1016/j.jfranklin.2018.05.034 [8] ZHAO L, ZHANG H, YANG Y, et al. Integral sliding mode control of a bilateral teleoperation system based on extended state observers[J] . International Journal of Control, Automation and Systems,2017,15:2118 − 2125. doi: 10.1007/s12555-016-0441-8 [9] YANG C, GUO S, BAO X, et al. A vascular interventional surgical robot based on surgeon’s operating skills[J] . Medical & Biological Engineering & Computing,2019,57:1999 − 2010. [10] LIU H, WANG H, YANG X, et al. Mechanism design of the minimally invasive vascular interventional surgery robot system[C]//Proceedings of 2017 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM). Ningbo: IEEE, 2017: 225−230. -

 下载:
下载:






 点击查看大图
点击查看大图

图(11)
计量
- 文章访问数: 1145
- HTML全文浏览量: 553
- PDF下载量: 110
- 被引次数: 0
