

Research on safety redundancy of automotive EPS system based on functional safety
-
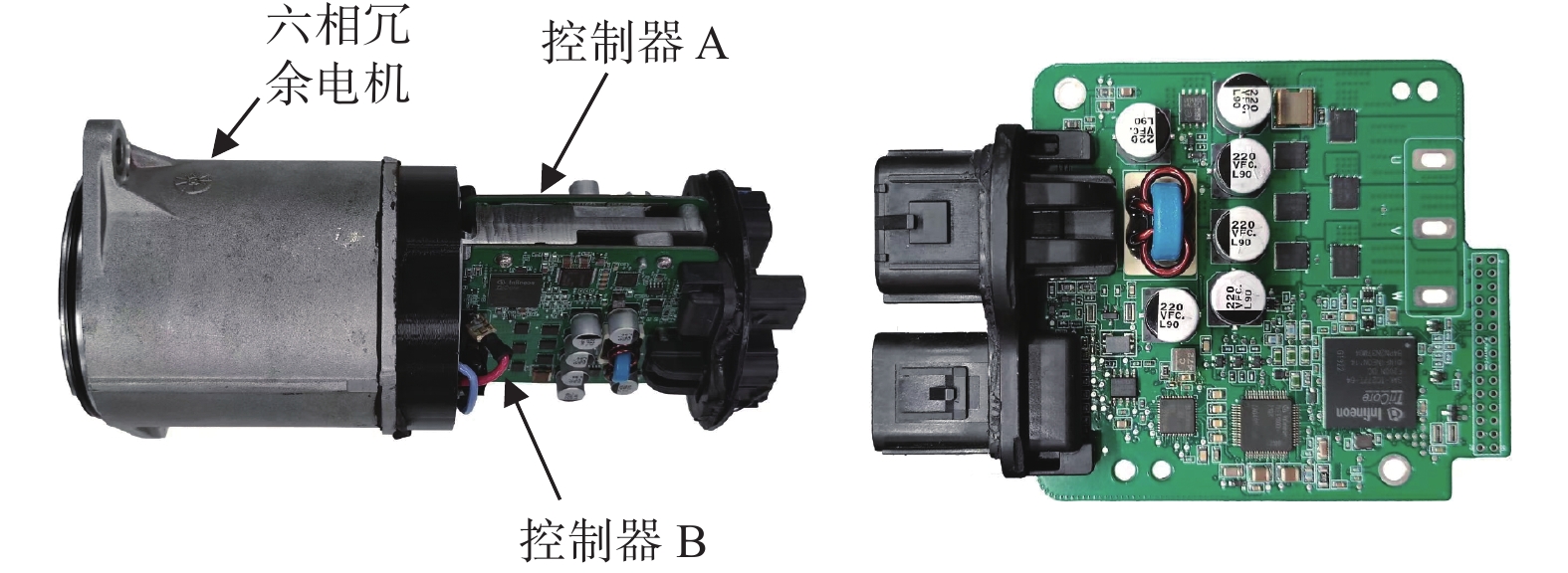
摘要: 电动助力转向(electric power steering, EPS)系统是车辆常用的转向执行器,其失效将严重影响驾乘人员的安全。为提高EPS系统的安全性与可靠性,基于功能安全标准建立EPS系统安全冗余机制:基于ISO26262对EPS系统进行研究,通过相关项定义、危害分析与风险评估(HARA),得到系统的功能安全目标与需求,并对其进行分配;设计EPS系统架构、容错机制,以提高系统的安全性;最后,对所设计的安全冗余机制进行台架试验。结果表明,在单侧桥驱芯片故障、单侧电机位置传感器故障、双侧电机位置传感器故障等故障注入的情况下,系统能够实现预期响应,满足功能安全目标,验证了所设计安全冗余机制的有效性。Abstract: Electric power steering (EPS) system is a commonly used steering actuator for vehicles at present, and its failure will seriously affect the safety of drivers and passengers. A safety redundancy mechanism for the EPS system was established based on functional safety standards. Based on ISO26262, the EPS system was studied. Through the item definition, hazard analysis and risk assessment, the safety goal and functional safety requirements of the system were obtained and allocated. The architecture and fault-tolerant mechanism of EPS system were designed to improve the security of the system. Finally, the designed safety redundancy mechanism was tested on the bench. The results show that the system can achieve the expected response and meet the functional safety goal under the condition of fault injection such as unilateral bridge driver IC fault, unilateral motor position sensor fault and bilateral motor position sensor fault, which verifies the effectiveness of the designed safety redundancy mechanism.
-
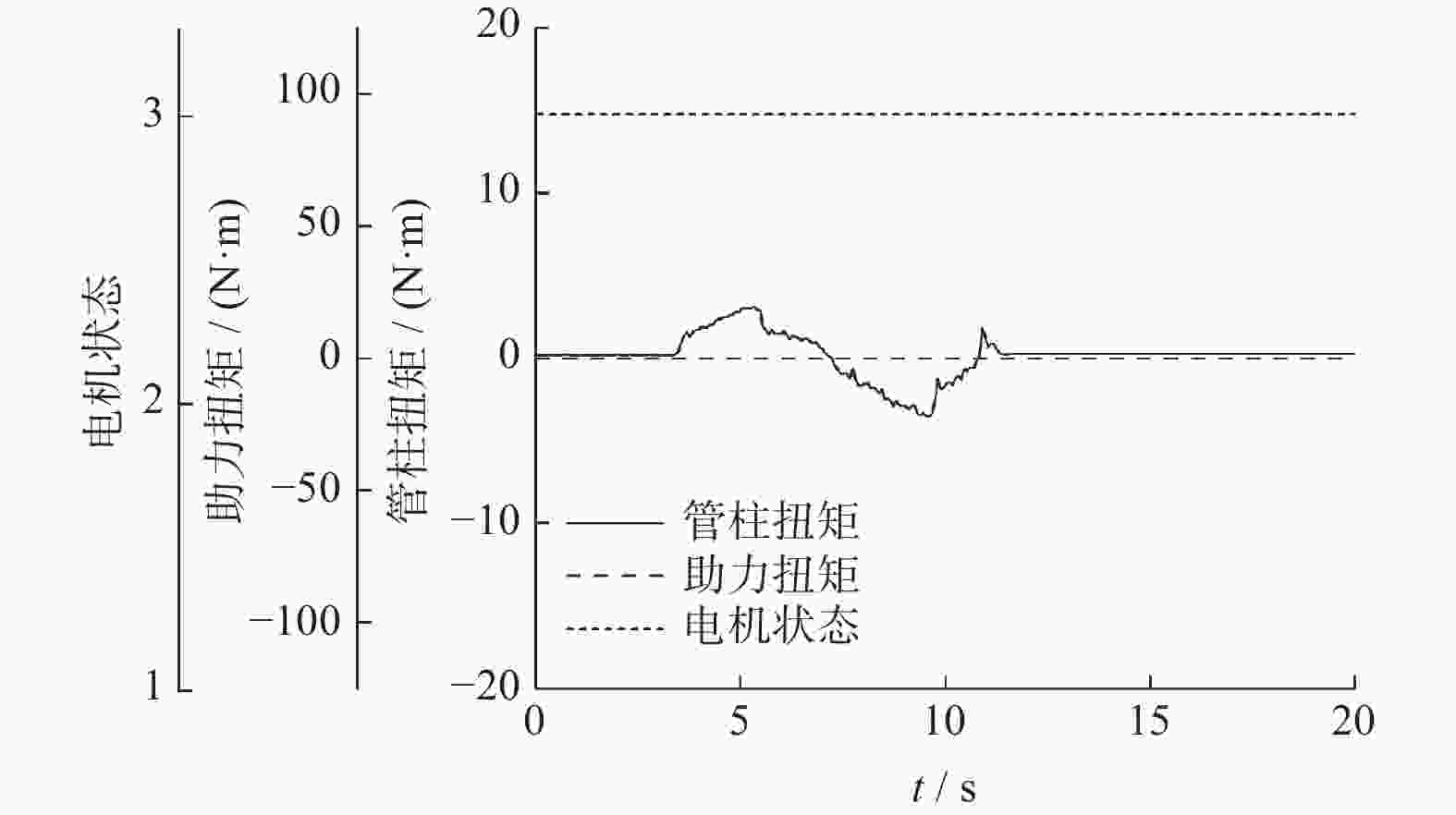
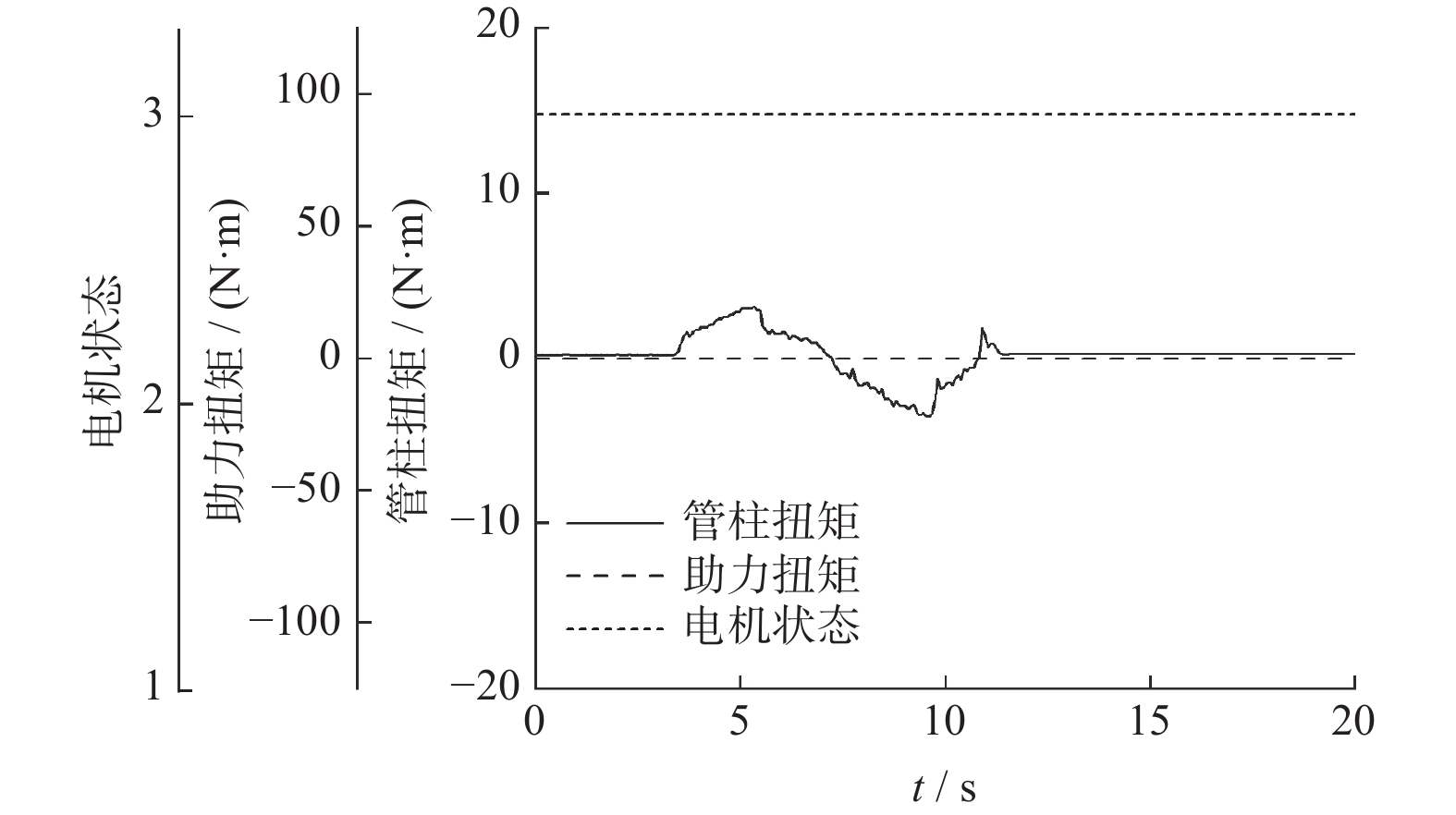
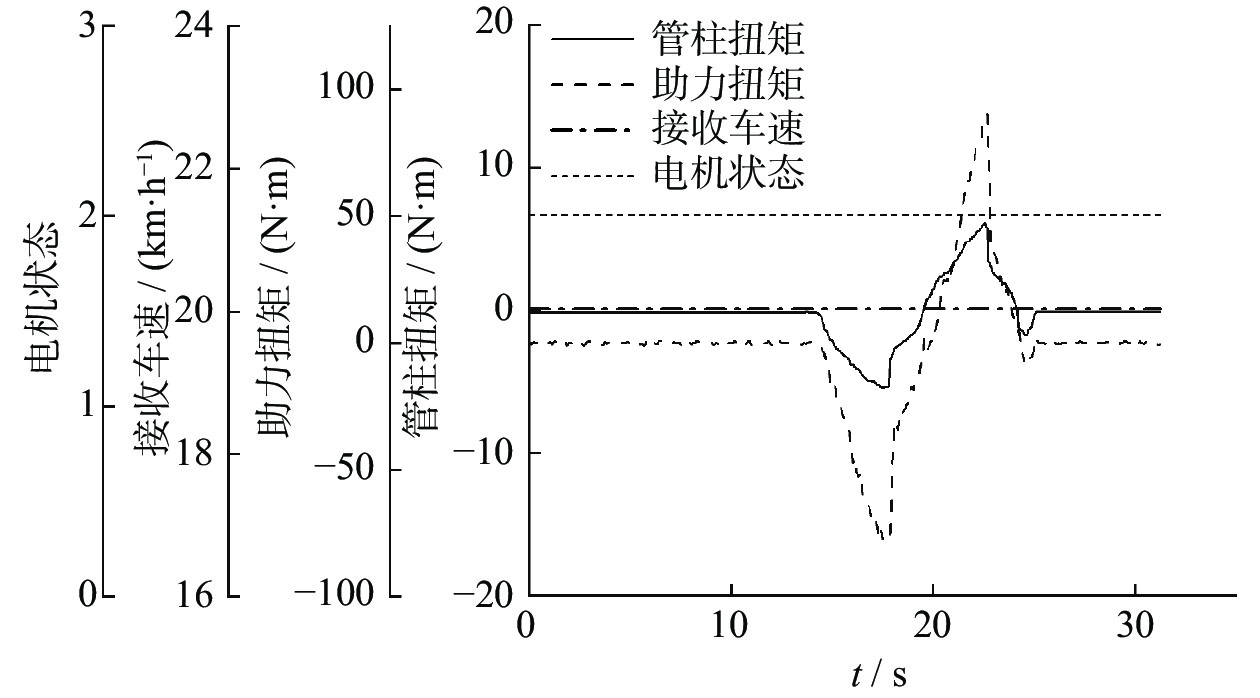
图 5 桥驱芯片单侧故障注入后A板响应
Figure 5. Response of A board after unilateral fault injection of bridge driver IC
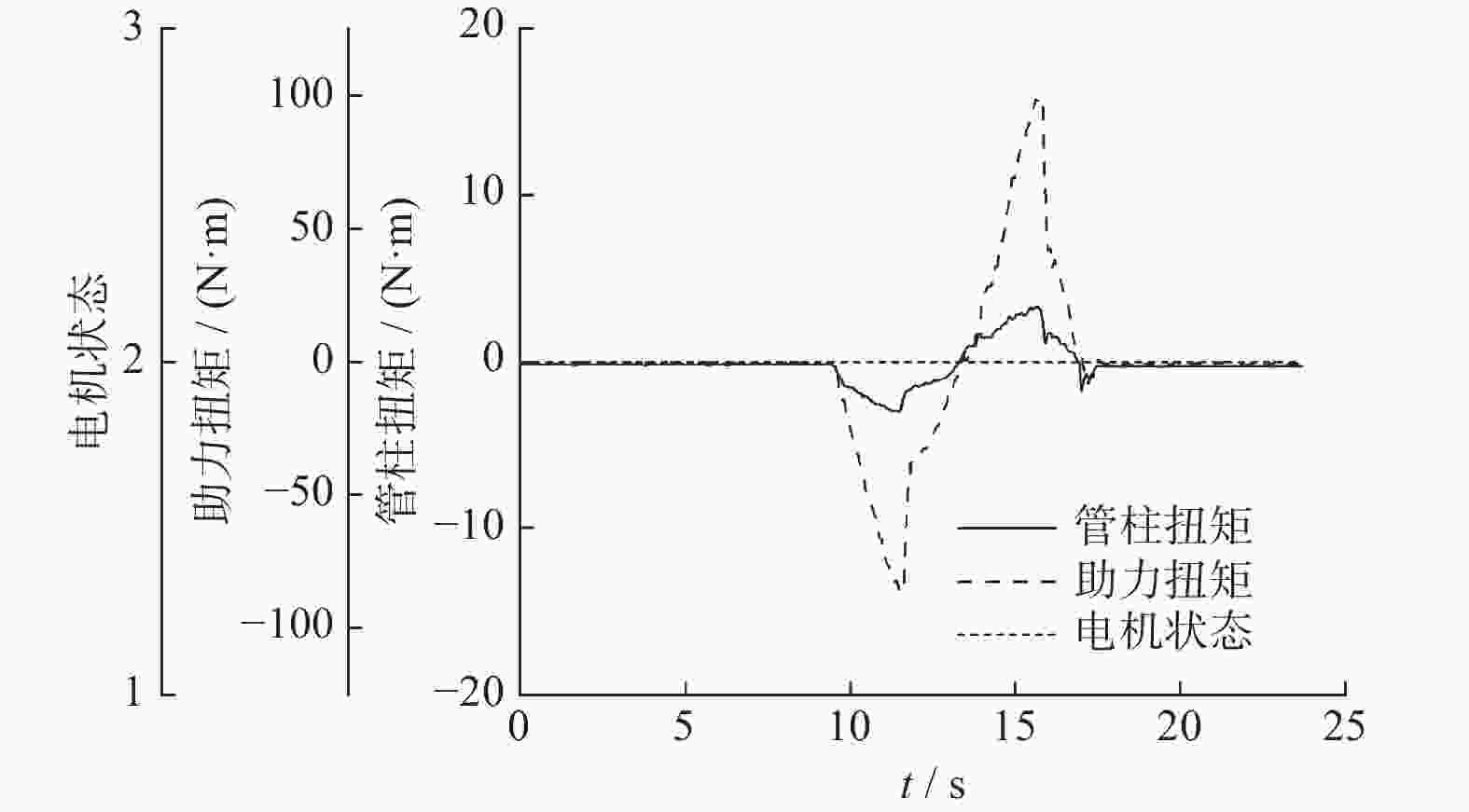
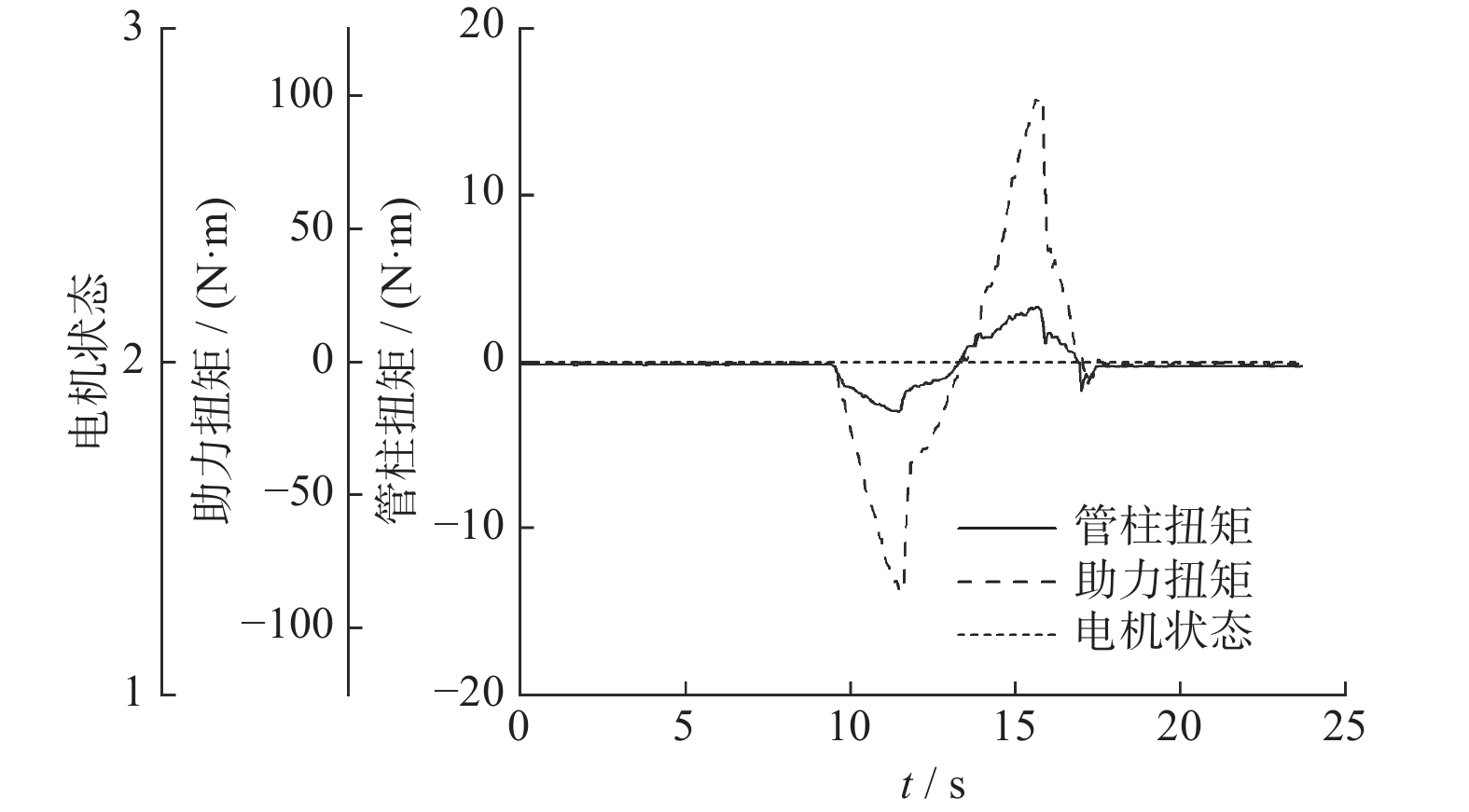
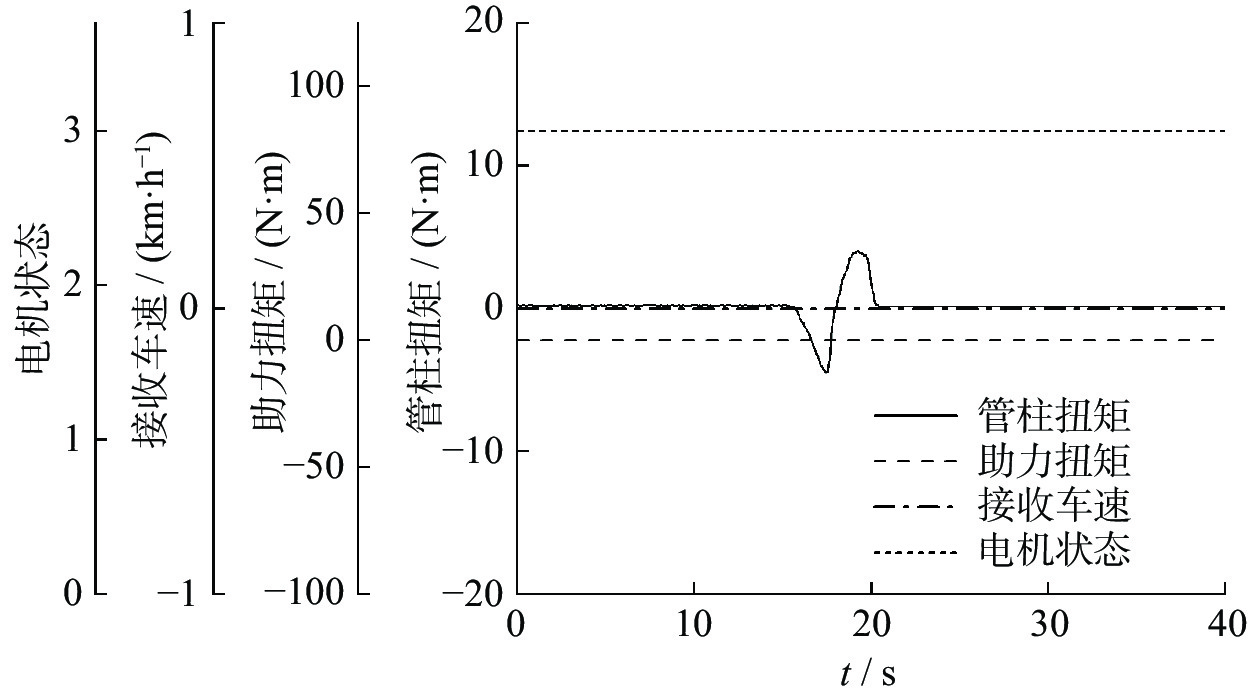
图 6 桥驱芯片单侧故障注入后B板响应
Figure 6. Response of B board after unilateral fault injection of bridge driver IC
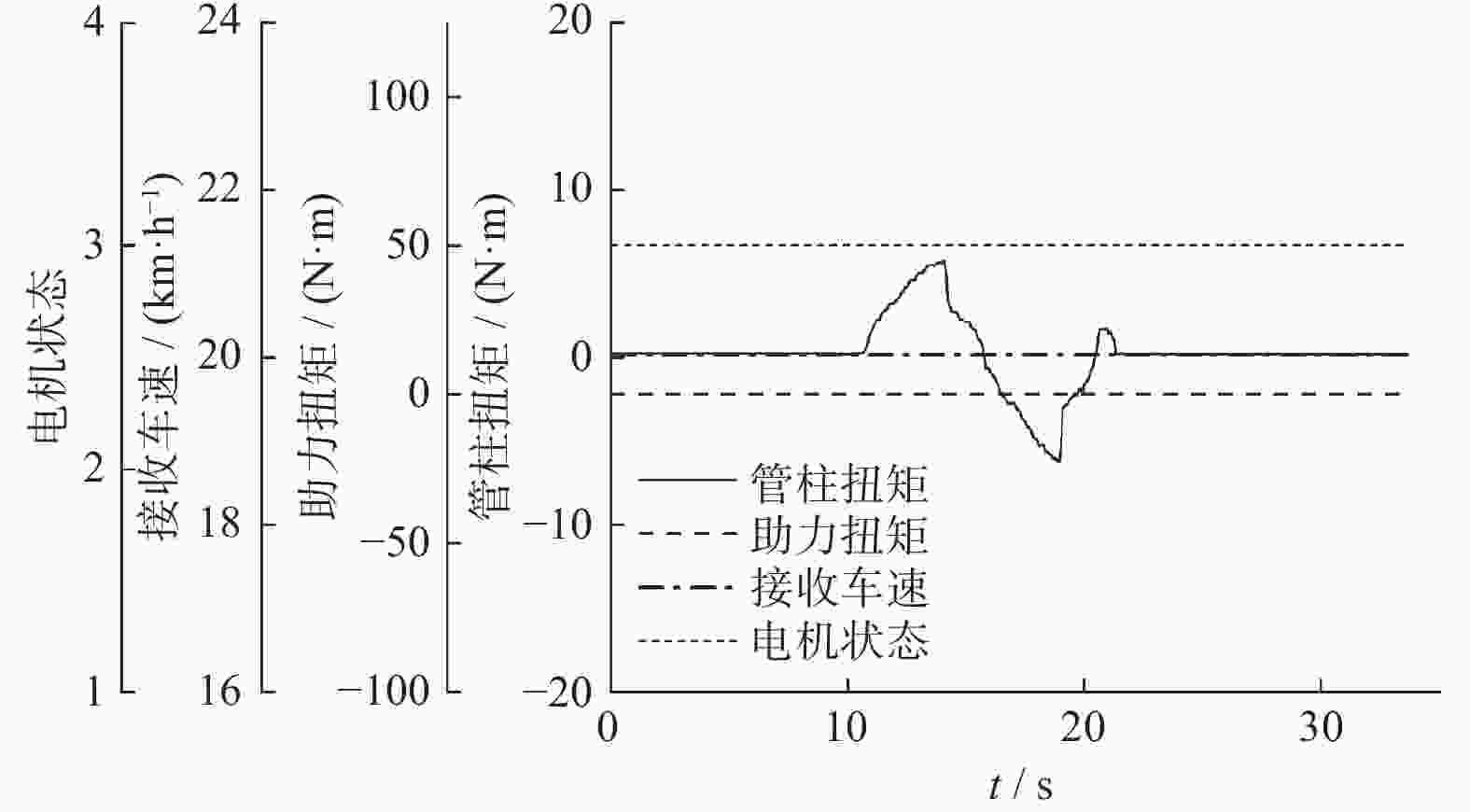
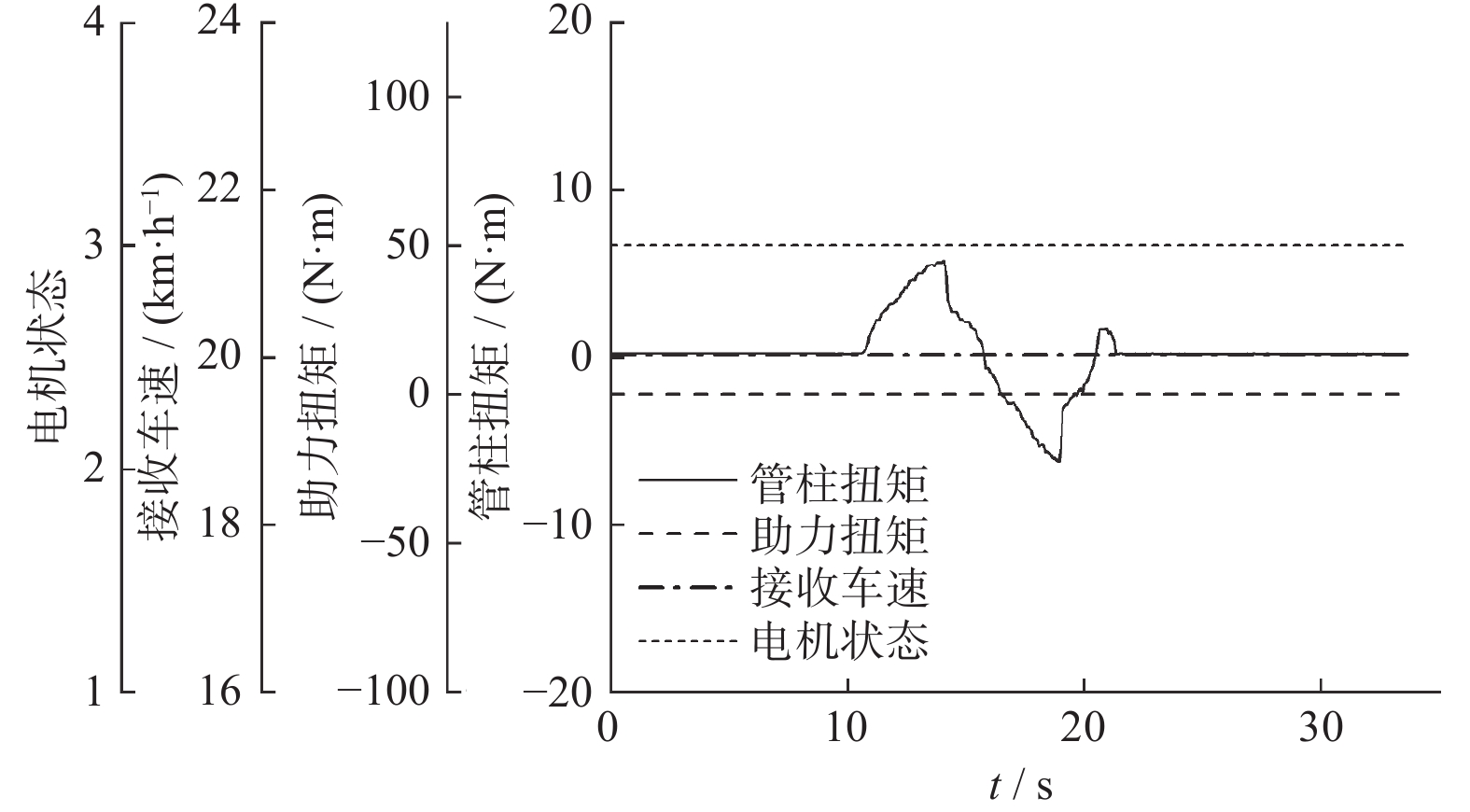
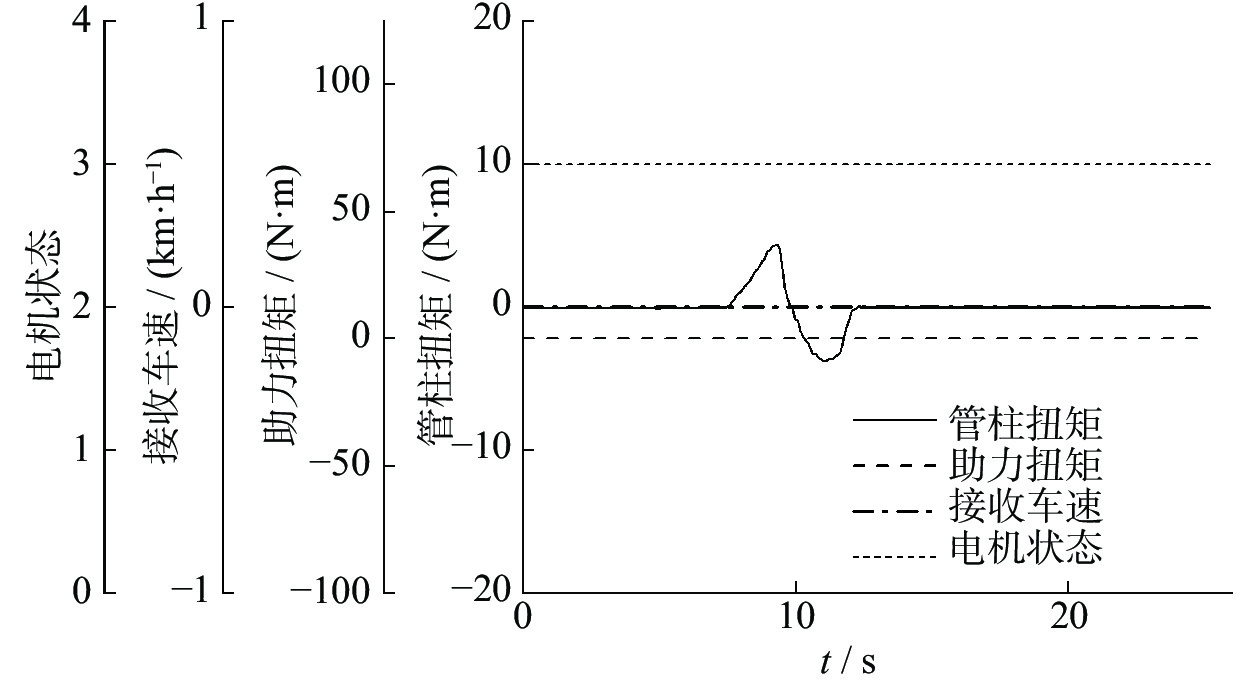
图 7 电机位置传感器单侧故障注入后A板响应
Figure 7. Response of A board after unilateral fault injection of motor position sensor
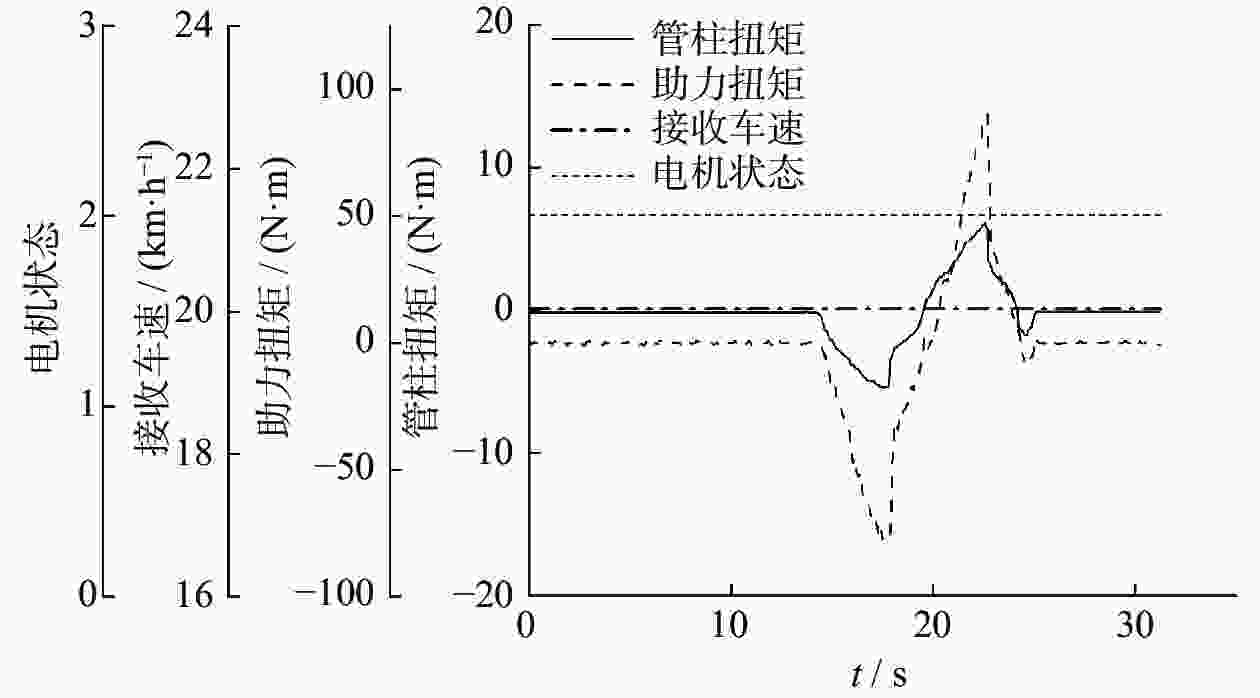
图 8 电机位置传感器单侧故障注入后B板响应
Figure 8. Response of B board after unilateral fault injection of motor position sensor
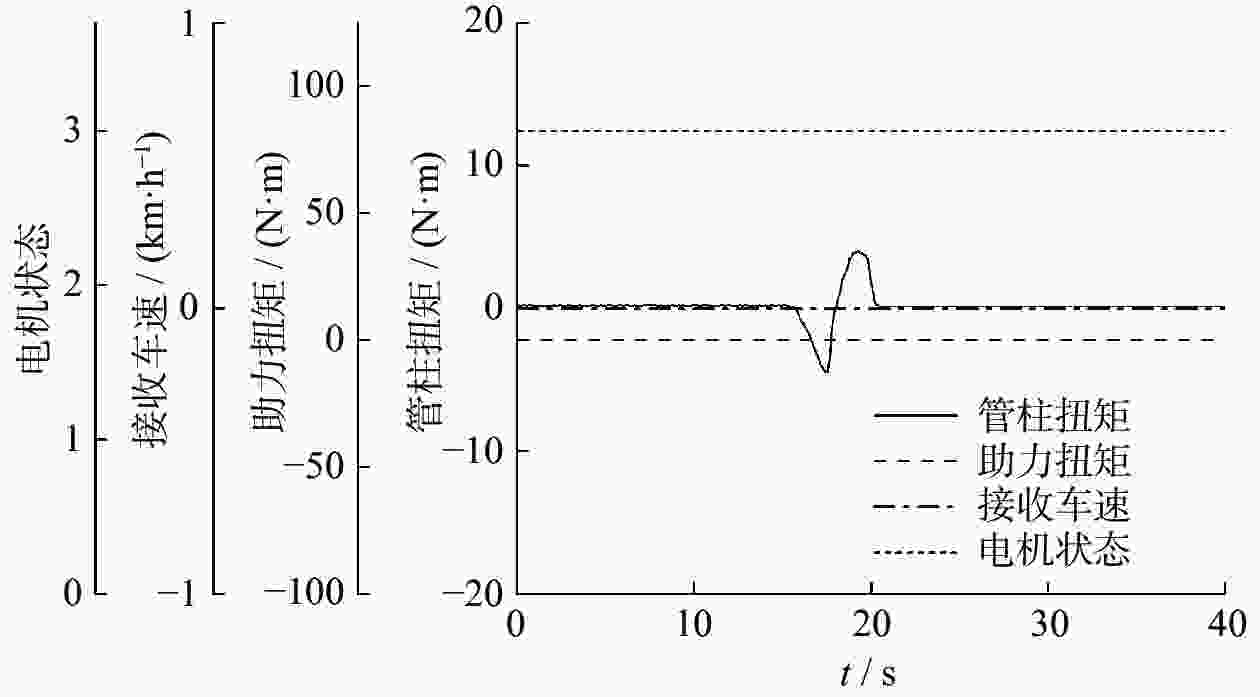
图 9 电机位置传感器双侧故障注入后A板响应
Figure 9. Response of A board after bilateral fault injection of motor position sensor
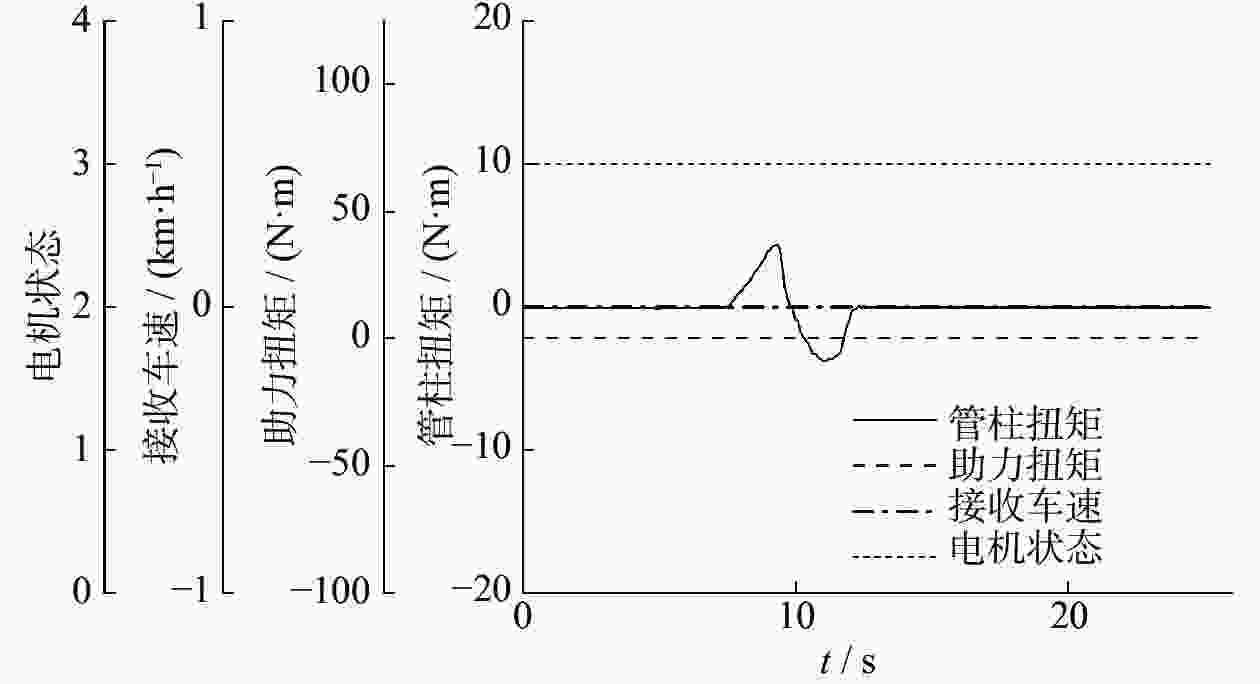
图 10 电机位置传感器双侧故障注入后B板响应
Figure 10. Response of B board after bilateral fault injection of motor position sensor
表 1 EPS系统危害识别
Table 1. Hazard identification of EPS system
功能失效 整车级危害 转向助力丢失 车辆失去助力 无助力需求时被激活 车辆非预期转向 转向助力过大 车辆转向过度 转向助力过小 车辆转向过重 转向助力方向相反 车辆转向相反 转向卡死 车辆失去横向控制功能  下载: 导出CSV
下载: 导出CSV
表 2 ASIL等级确定表
Table 2. ASIL level determination table
严重度 暴露度 可控性 C1 C2 C3 S1 E1 QM QM QM E2 QM QM QM E3 QM QM A E4 QM A B S2 E1 QM QM QM E2 QM QM A E3 QM A B E4 A B C S3 E1 QM QM A E2 QM A B E3 A B C E4 B C D
下载: 导出CSV
表 3 EPS系统功能安全目标
Table 3. Functional safety goal of EPS system
编号 安全目标 ASIL等级 SG_01 避免转向助力丢失 D SG_02 避免转向助力过小 C SG_03 避免转向助力过大 D SG_04 避免转向助力方向相反 D SG_05 避免无助力需求时被激活 D SG_06 避免转向卡死 D
下载: 导出CSV
表 4 功能安全需求
Table 4. Functional safety requirement
序号 功能安全需求 FSR1.1 角度/扭矩传感器与控制器之间正常通信,并进行数据的有效性检测; FSR1.2 角度/扭矩传感器故障能够在检测区间被检测到; FSR1.3 角度/扭矩传感器发生故障后,点亮故障灯给驾驶员发出警告,系统过渡到相应的安全状态; FSR1.4 角度/扭矩传感器具有故障外发功能,在出现违反功能安全目标的故障后,将故障信息传递给控制模块; FSR2.1 助力电机在EPS系统任何助力工况下,正常提供助力; FSR2.2 助力电机故障能够在检测区间被检测到; FSR2.3 助力电机发生故障后,点亮故障灯给驾驶员发出警告,EPS系统过渡到相应的安全状态; FSR2.4 助力电机具有故障外发功能,在出现违反功能安全目标的故障后,将故障信息传递给控制模块; FSR3.1 通信总线传输信号满足有效性检测; FSR3.2 通信总线故障发生后,故障信息能够被EPS控制模块获取;
下载: 导出CSV
-
[1] 段顺昌, 白先旭, 石琴, 等. 汽车自动紧急制动系统控制策略的预期功能安全设计[J] . 汽车工程,2022,44(9):1305 − 1317,1338. [2] 邵文博, 李骏, 张玉新, 等. 智能汽车预期功能安全保障关键技术[J] . 汽车工程,2022,44(9):1289 − 1304. [3] 夏伟. 基于深度强化学习的自动驾驶决策仿真[D]. 深圳: 中国科学院大学(中国科学院深圳先进技术研究院), 2017. [4] 郭建, 王高翃, 赵涌鑫, 等. 基于ISO26262的汽车电子功能安全: 方法与应用[M]. 北京: 机械工业出版社, 2021. [5] 赵贺森. EPS功能安全设计方法与基于MCU在环测试的研究[D]. 长春: 吉林大学, 2014. [6] 汤玮. 基于功能安全的智能汽车EPS系统容错控制研究[D]. 合肥: 合肥工业大学, 2020. [7] 荣芩, 吴晓东, 许敏. 基于ISO标准的道路车辆线控转向系统的功能安全概念设计[J] . 汽车安全与节能学报,2018,9(3):250 − 257. [8] 常秀岩, 高尚, 姜廷龙, 等. 基于功能安全要求的线控转向系统开发及验证[J] . 汽车技术,2021(9):27 − 32. [9] 王俊明, 周宏伟. 基于ISO26262的车道保持辅助的功能安全概念设计[J] . 重庆交通大学学报(自然科学版),2019,38(3):135 − 142. [10] HUANG C, LI L. Architectural design and analysis of a steer-by-wire system in view of functional safety concept[J] . Reliability Engineering & System Safety,2020,198:106822. [11] 董自远, 李捷辉. 基于ISO 26262的甲醇/柴油喷射控制系统功能安全概念开发[J] . 中国安全生产科学技术,2021,17(12):78 − 85. [12] SCHRANNER F S, MISHENI A A, WARNECKE J. Deriving a representative variant for the functional safety development according to ISO 26262[J] . Reliability Engineering & System Safety,2021,209:107436. [13] 程洁, 郑凯, 秦嘉等. 面向智能车辆的EMB系统功能安全分析及应用设计[J] . 汽车安全与节能学报,2023,14(1):69 − 79. [14] 高云峰. 基于功能安全的线控底盘电液混合制动系统研究[D]. 长沙: 湖南大学, 2021. [15] WU Z, SU X, ZHU Y. Functional safety system design on EPS[C]//Proceedings of SAE-China Congress 2016: Selected Papers. Singapore: Springer, 2017: 647−664. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 2422
- HTML全文浏览量: 1075
- PDF下载量: 331
- 被引次数: 0
