

Design and implementation of massage robot based on visual guidance
-
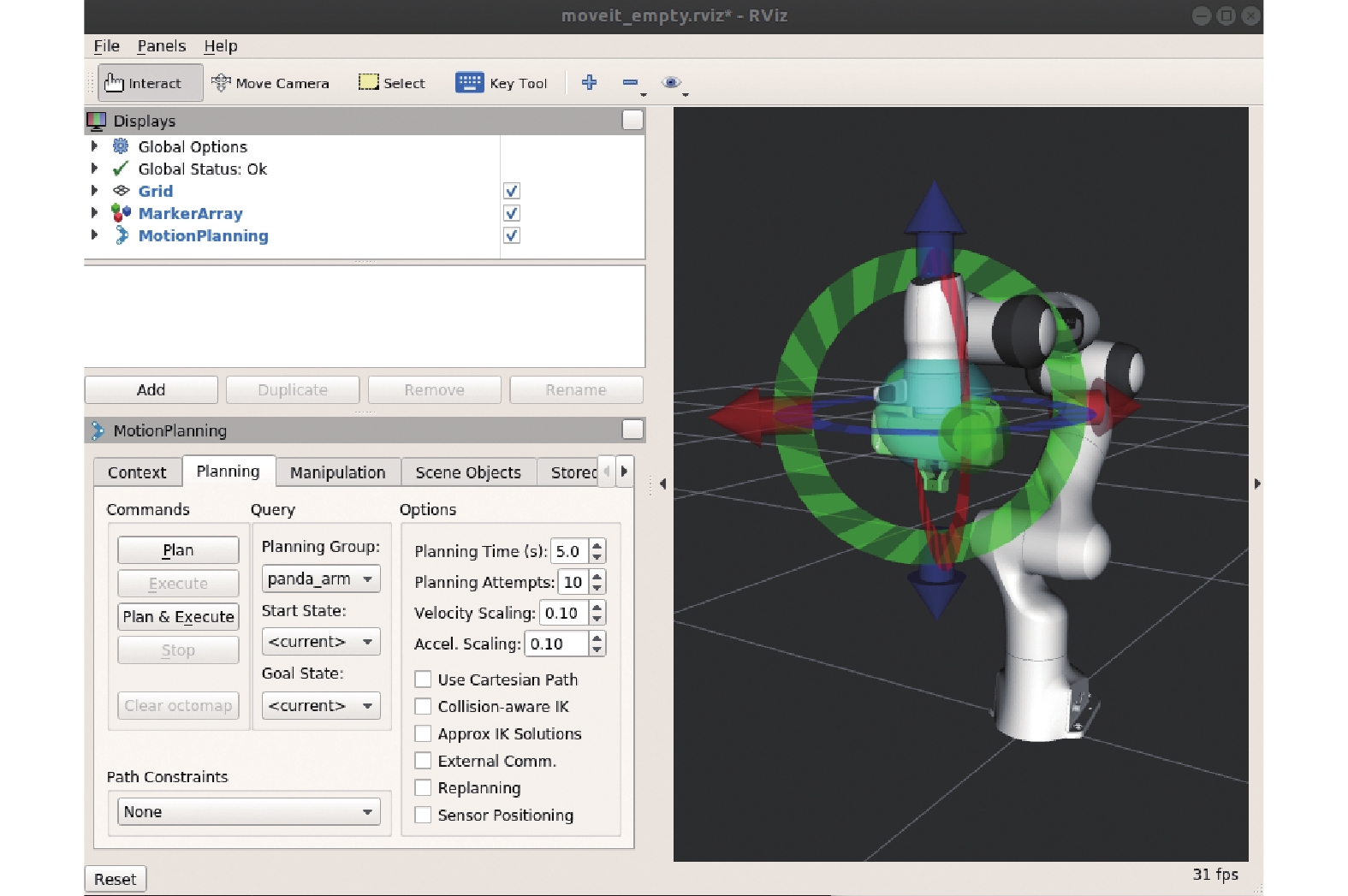
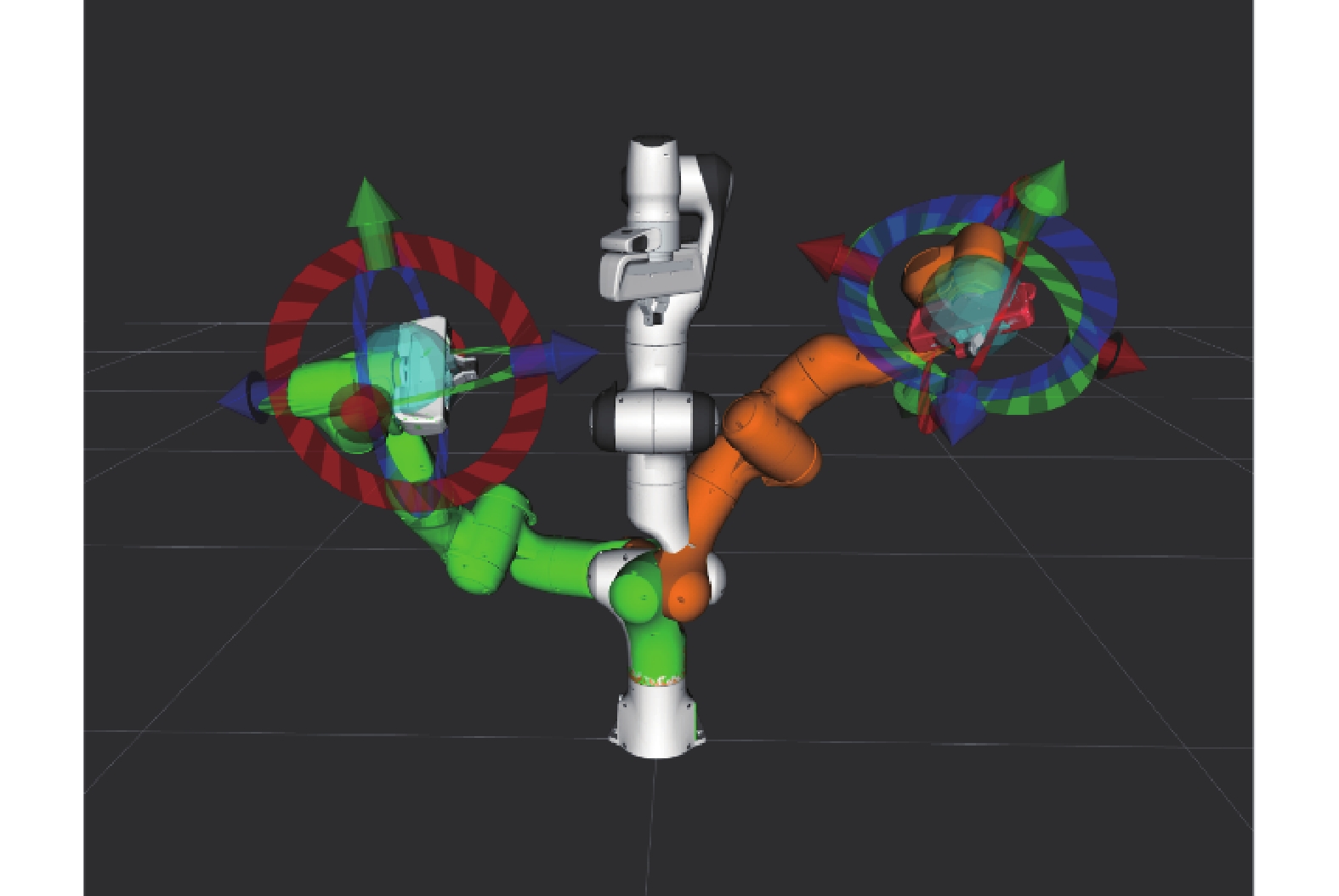
摘要: 基于视觉引导设计中医(traditional chinese medicine,TCM)推拿机器人。通过搭建视觉引导平台,以Franka多自由度机械臂为基础建立推拿机器人平台,并构建两个平台间的数据映射模型,通过机器人操作系统(robot operating system,ROS)将机械臂与计算机(PC)端连接实现实时控制;将光学运动捕捉技术与多自由度机械臂融合,实现对中医推拿过程的学习与复现。Abstract: A traditional Chinese medicine (TCM) massage robot based on visual guidance was designed. By building a visual guidance platform, the massage robot platform was established based on the Franka multi-degree of freedom robotic arm, and the data mapping model between the two platforms was constructed. The robot arm was connected to the PC through the robot operating system (ROS) system to achieve real-time control. By integrating the optical motion capture technology with the multi-degree of freedom robotic arm, the learning and reproduction of TCM massage techniques were realized.
-

图 11 Optitrack系统与Franka机械臂的坐标映射模型
base—Franka机械臂安装基座;Opt—L型标定尺;tool—Franka末端;Cbase—基坐标系;Ctool—末端工具坐标系;COpt—Optitrack系统坐标系。
Figure 11. Coordinate mapping model of Optitrack system and Franka robot arm
表 1 Franka Panda的D−H坐标参数
Table 1. Franka Panda's D−H coordinate parameters
关节 a/m d/m θ/rad α/rad Joint1 0 0.333 θ1 0 Joint2 0 0 θ2 -π/2 Joint3 0 0.316 θ3 π/2 Joint4 0.0825 0 θ4 π/2 Joint5 −0.0825 0.384 θ5 −π/2 Joint6 0 0 θ6 π/2 Joint7 0.088 0 θ7 π/2 Flange 0 0.107 0 0  下载: 导出CSV
下载: 导出CSV
-
[1] MAŃKO G, JEKIEŁEK M, AMBROŻY T, et al. Physiotherapeutic methods in the treatment of cervical discopathy and degenerative cervical myelopathy: a prospective study[J] . Life,2022,12(4):513. doi: 10.3390/life12040513 [2] 陈龙安, 马春杰, 李秀兰, 等. 推拿联合针灸疗法在神经根型颈椎病治疗中的效果分析[J] . 现代医学与健康研究电子杂志,2022,6(18):32 − 36. [3] 曾振华, 陈莉. 颈椎推拿联合常规治疗对神经根型颈椎病的临床疗效分析[J] . 四川中医,2018,36(9):196 − 198. [4] CHANG Z H, FENG H. Review of acupoints positioning and tracking technology for chinese massage robot[J] . Advanced Materials Research,2012,1898(542/543):741 − 744. [5] MOURI K, TERASHIMA K, MINYONG P, et al. Identification and hybrid impedance control of human skin muscle by multi-fingered robot hand[C]//Proceedings of 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego: IEEE, 2007: 2895−2900. [6] PANYA M, KEISUKE M, HIDEO K, et al. Hybrid impedance and force control for massage system by using humanoid multi-fingered robot hand[C]//Proceedings of 2007 IEEE International Conference on Systems, Man and Cybernetics. Montreal: IEEE, 2007: 1764−1769. [7] ARIJI Y, NAKAYAMA M, NISHIYAMA W, et al. Potential clinical application of masseter and temporal muscle massage treatment using an oral rehabilitation robot in temporomandibular disorder patients with myofascial pain[J] . Cranio,2015,33(4):256 − 262. [8] QIU C, ZHANG Y, KAI L. Massage apparatus: United States, 20200281805 [P]. 2020−09−10 [9] 周润生, 尹小琴, 朱和军. 推拿灵巧手的设计及其位置分析与仿真[J] . 机械传动,2017,41(7):102 − 105. [10] 张明亮, 石志新, 罗玉峰, 等. 中医推拿机器人末端执行器的结构设计与分析[J] . 机械传动,2020,44(6):73 − 77, 83. [11] 陈俊, 王殊轶, 汪鹏, 等. 中医推拿机器人设计与研究[J] . 生物医学工程学进展,2019,40(4):190 − 195. -

 下载:
下载:







 点击查看大图
点击查看大图

图(13) / 表(1)
计量
- 文章访问数: 1786
- HTML全文浏览量: 1172
- PDF下载量: 171
- 被引次数: 0
