

Application research of visual-based method for detecting toilet cleanliness
-
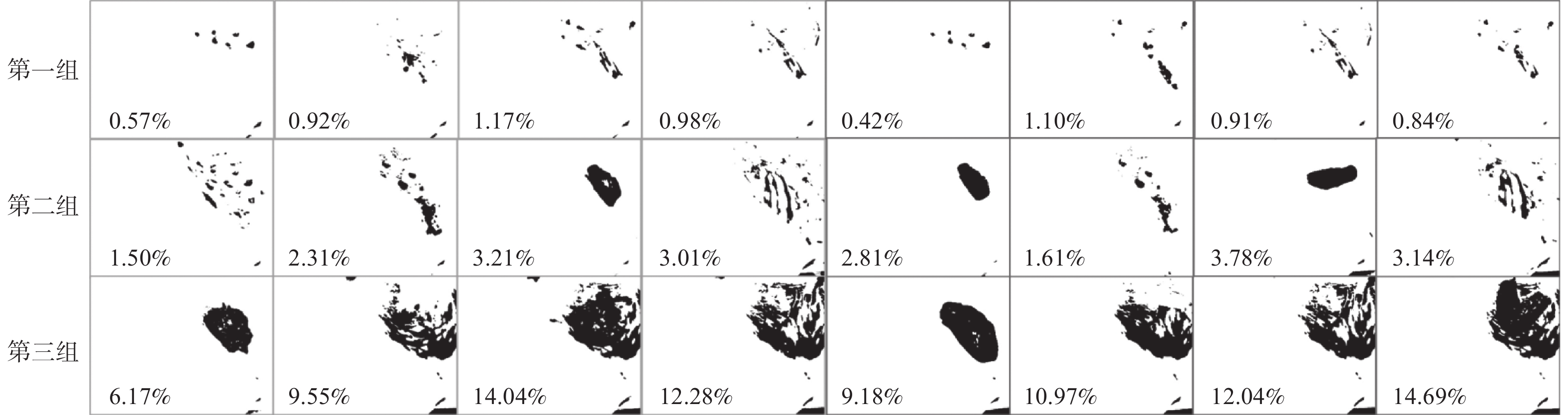
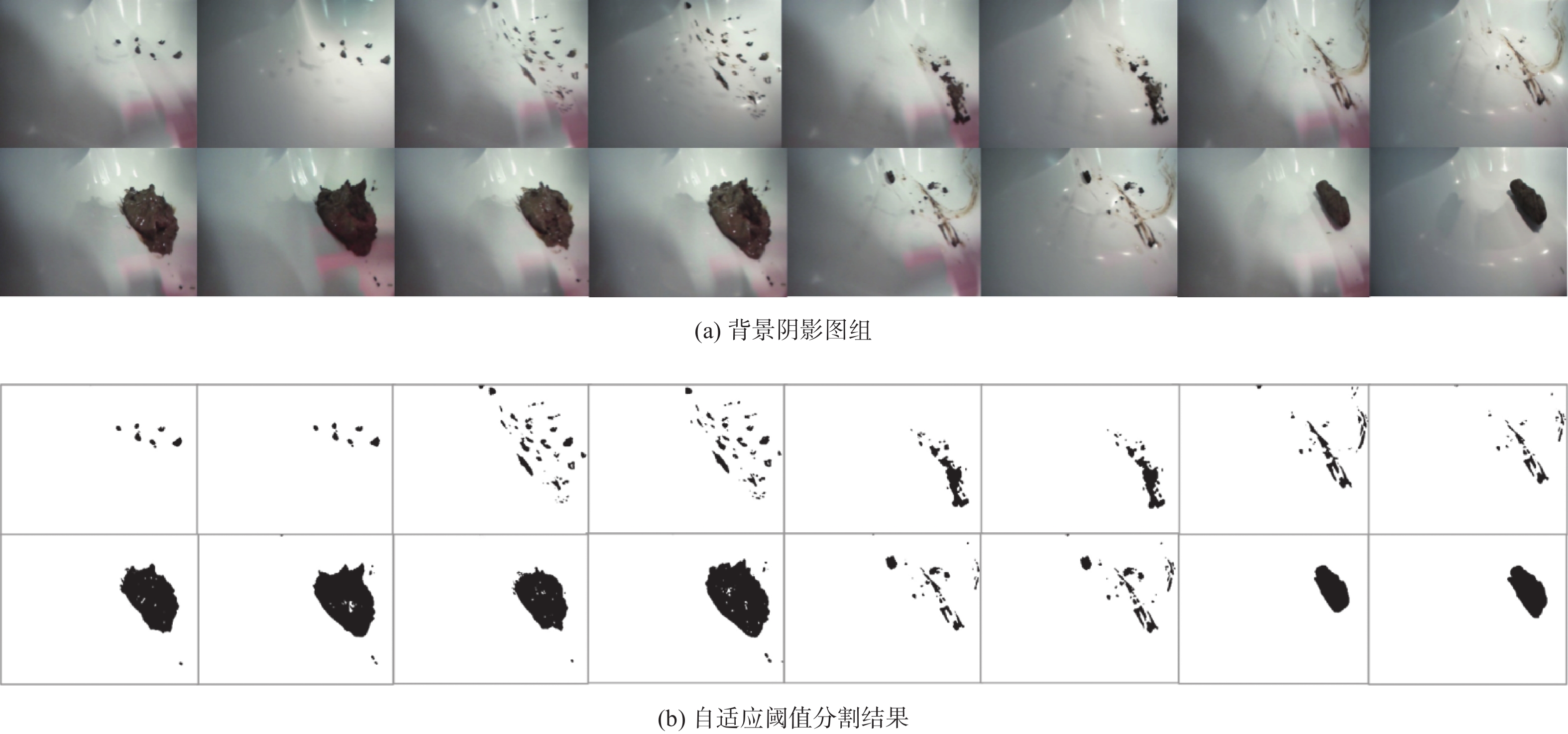
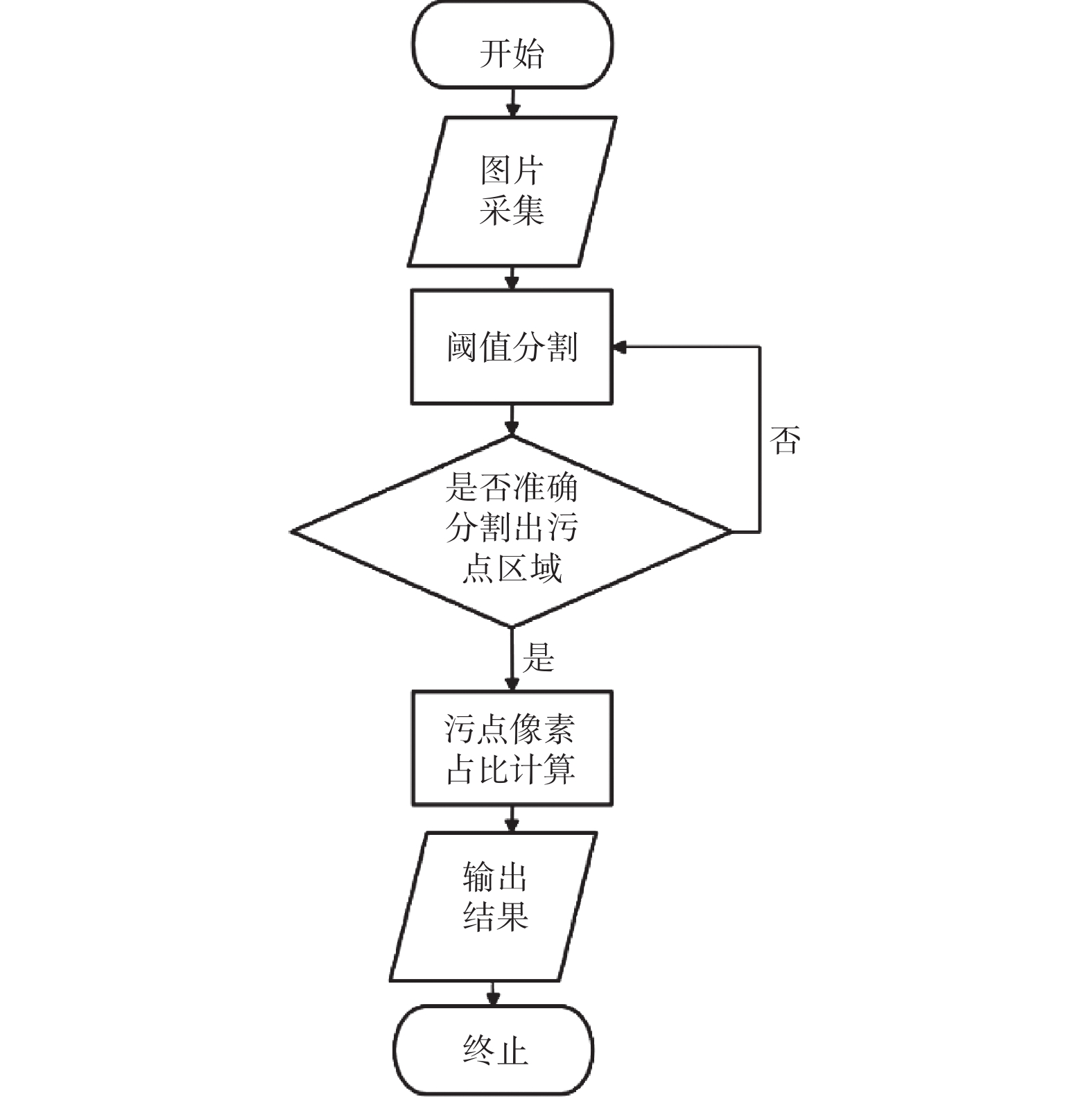
摘要: 目前二便智能护理机器人只在排便结束后对坐便器斗进行一次恒定大水量冲洗,没有相应清洁度检测环节,导致残存的粪便容易造成空气异味和细菌滋生,甚至疾病传染。针对于此,提出基于视觉的两种清洁度检测方法:一种是通过计算污点像素占比来进行坐便器清洁度的评估,另一种是采用图像模板匹配的方法来检测坐便器的清洁度。试验结果表明:采取自适应阈值分割来计算污点像素占比时能够很好地克服背景阴影的影响,且能够准确地区分出不同污染程度的照片组,达到便斗清洁度检测的目的。Abstract: At present, intelligent nursing robots for secondary defecation only rinse the bucket with a constant amount of water after defecation, without corresponding cleanliness testing. The remaining feces can easily cause air odor and bacterial growth, and even spread diseases. In response to this, two visual based cleanliness detection methods were proposed: one is to evaluate the cleanliness of the toilet by calculating the proportion of dirty pixels, and the other is to use image template matching method to detect the cleanliness of the toilet. Experimental results show that by using adaptive threshold segmentation to calculate the proportion of dirty pixels, it can effectively overcome the influence of background shadows and accurately distinguish photo groups with different levels of pollution, thus achieving the goal of detecting the cleanliness of the toilet.
-
Key words:
- cleanliness /
- image processing /
- image similarity /
- adaptive threshold segmentation
-
表 1 3种相似度评估算法匹配得分
Table 1. Matching score results of three similarity evaluation algorithms
图像 SSIM 余弦距离 皮尔逊相关性 组一 组二 组三 组一 组二 组三 组一 组二 组三 a 0.94 0.91 0.86 0.98 0.99 0.91 0.93 0.95 0.56 b 0.92 0.91 0.81 0.92 0.96 0.89 0.93 0.89 0.51 c 0.92 0.92 0.76 0.93 0.93 0.87 0.92 0.75 0.14 d 0.91 0.83 0.78 0.98 0.90 0.92 0.94 0.72 0.34 e 0.94 0.89 0.85 0.98 0.91 0.94 0.94 0.68 0.50 f 0.92 0.87 0.78 0.92 0.93 0.90 0.92 0.79 0.23 g 0.91 0.89 0.78 0.97 0.90 0.92 0.94 0.64 0.35 h 0.93 0.86 0.77 0.94 0.89 0.93 0.93 0.71 0.25  下载: 导出CSV
下载: 导出CSV
-
[1] 周祖茗. 智能护理机器人的设计与研究[D]. 南昌: 南昌大学, 2012. [2] 郝如茜. 白带显微图像中霉菌自动识别及清洁度判定的研究[D]. 成都: 电子科技大学, 2017. [3] 茅靳丰, 朱国栋, 张虎, 等. 风管清扫机器人智能清洁度评估系统的研究[J] . 建筑热能通风空调,34,1:37 − 41. [4] 刘翠, 徐立军, 文建鹏, 等. 洗碗机清洁度自动评分[J] . 电子产品可靠性与环境试验,2022,40(1):51 − 54. [5] 王朝卿, 沈小林, 李磊. 图像相似度计算算法分析[J] . 现代电子技术,2019,42(9):31 − 34. [6] 徐如如. 基于视觉的街道清洁度智能评估算法研究与实现[D]. 上海: 上海市计算技术研究所, 2021. [7] ĆIRIĆ D G. , PERIĆ Z H. , VUČIĆ N J, et al. Analysis of industrial product sound by applying image similarity measures[J] . Mathematics,2023,11(3):498. [8] SPYRIDONOS P, GAITANIS G, BASSUKAS I, et al. Gray Hausdorff distance measure for medical image comparison in dermatology: Evaluation of treatment effectiveness by image similarity[J]. Skin Research and Technology, 2013, 19(1). DOI: 10.1111/srt.12001. [9] 涂德浴, 刘坤, 朱庆, 等. 基于机器视觉的钢管壁厚在线检测方法研究[J] . 计算机工程与应用,2022,58(16):249 − 256. doi: 10.3778/j.issn.1002-8331.2101-0127 [10] 章毓晋. 图像处理和分析教程[M]. 2版. 北京: 人民邮电出版社, 2016: 13−14. [11] 李世文. 局部自适应分割算法在PCB图像处理中的应用[J] . 顺德职业技术学院学报,2019,17(2):9 − 12. doi: 10.3969/j.issn.1672-6138.2019.02.003 [12] 林恒青, 戴立庆. 基于局部自适应阈值分割和Hough变换的答题卡识别算法[J] . 桂林航天工业学院学报,2021,26(3):280 − 286. [13] 张富贵, 秦芝乾, 吴雪梅, 等. 基于结构相似度算法的烟叶光照强度研究[J] . 中国农机化学报,2020,41(3):128 − 133. [14] 孙小琳. 基于余弦相似度的自然计算方法研究及应用[D]. 哈尔滨: 哈尔滨师范大学, 2022. [15] 张宇, 刘雨东, 计钊. 向量相似度测度方法[J] . 声学技术,2009,28(4):532 − 536. -

 下载:
下载:





 点击查看大图
点击查看大图
图(11) / 表(1)
计量
- 文章访问数: 598
- HTML全文浏览量: 345
- PDF下载量: 99
- 被引次数: 0
