

Research on target recognition algorithm and control strategy of AEB system in curved roads
-
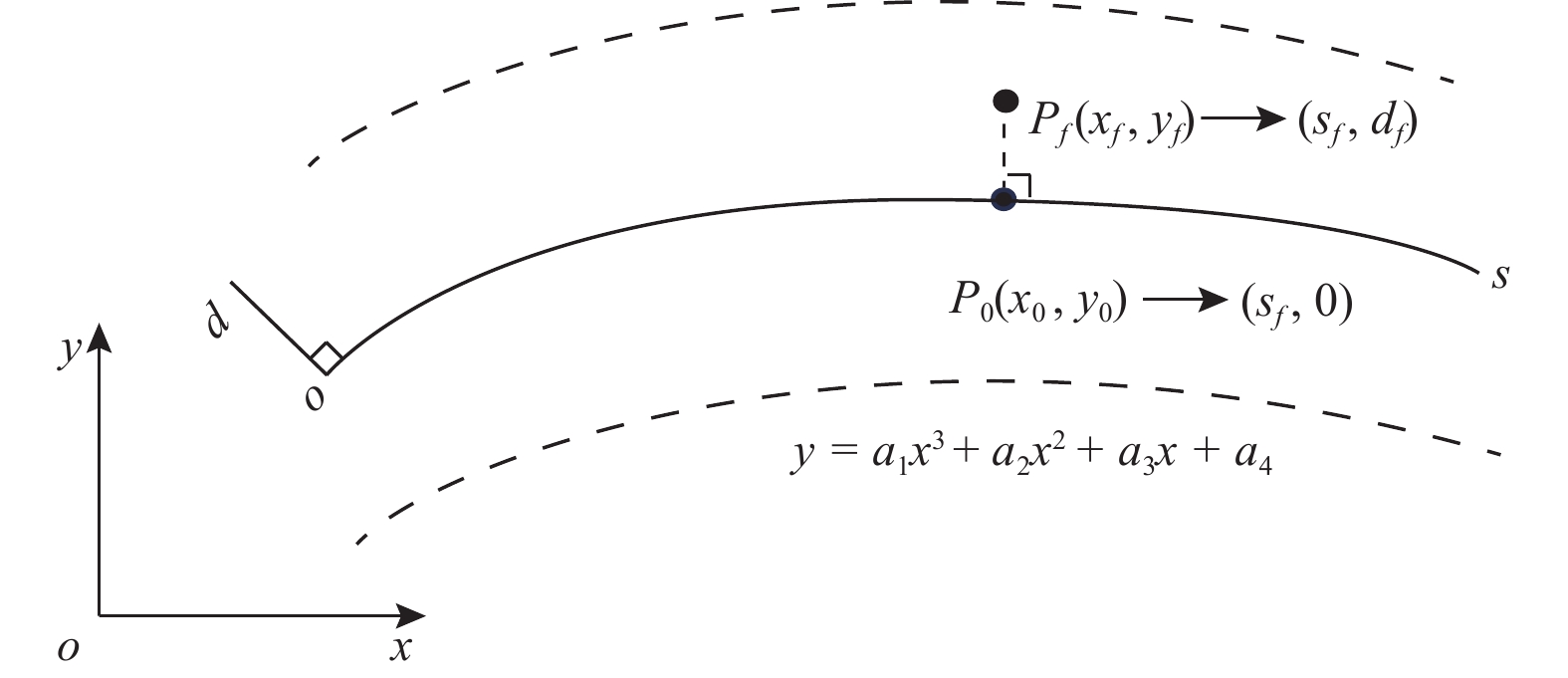
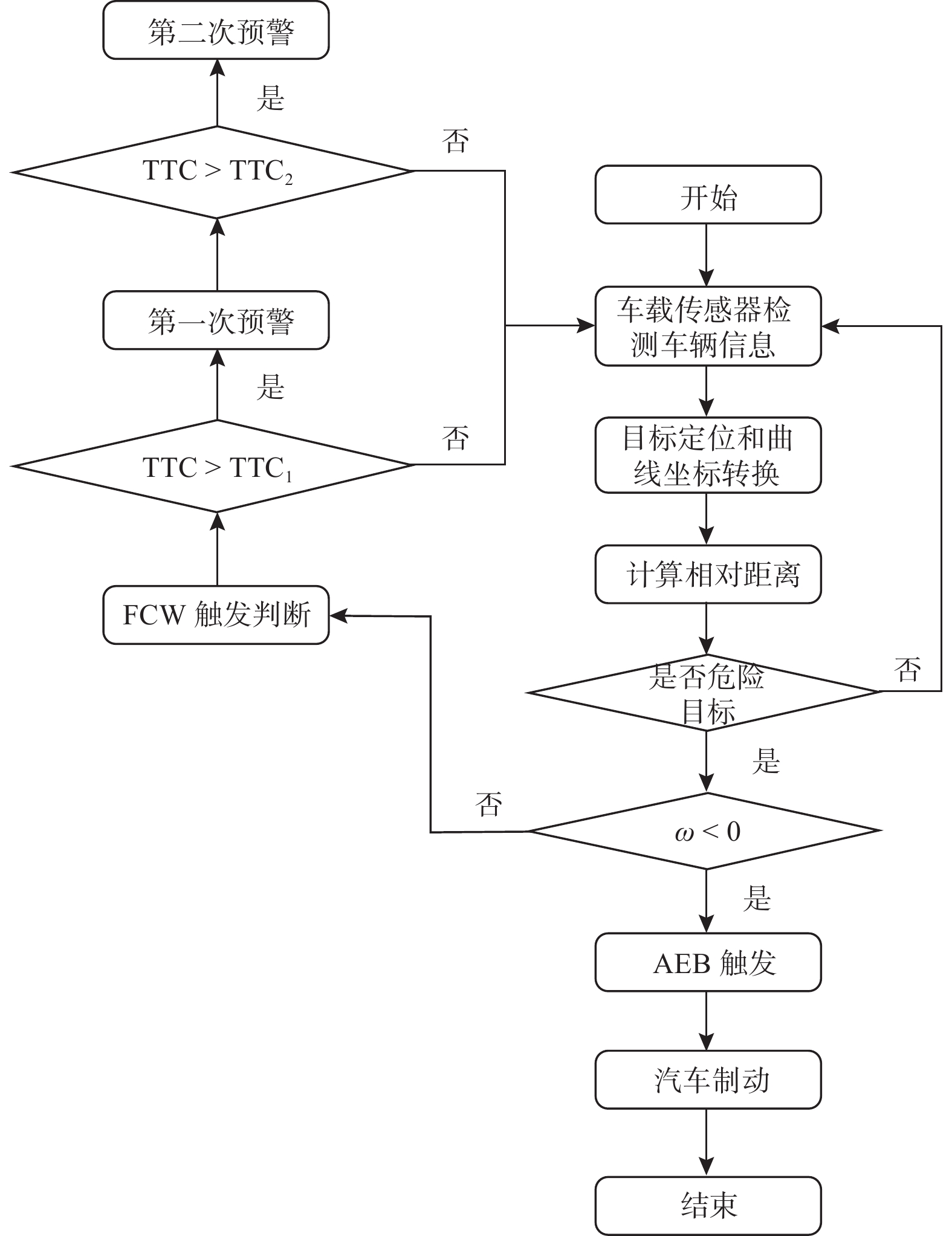
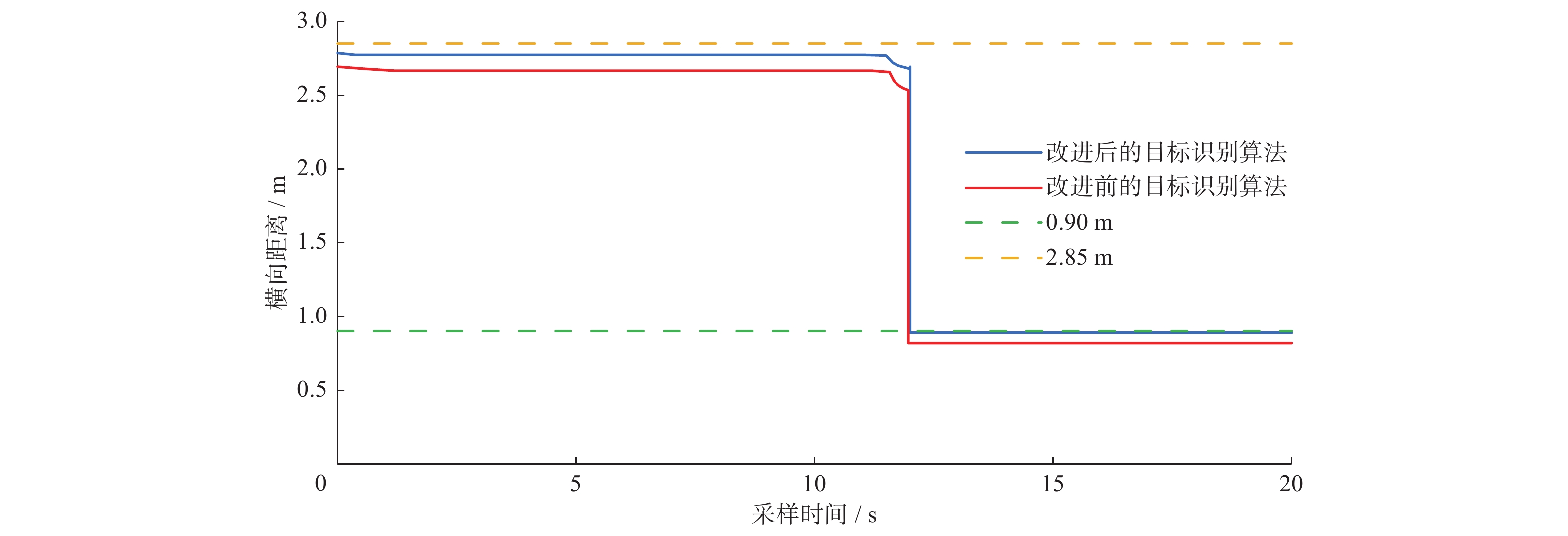
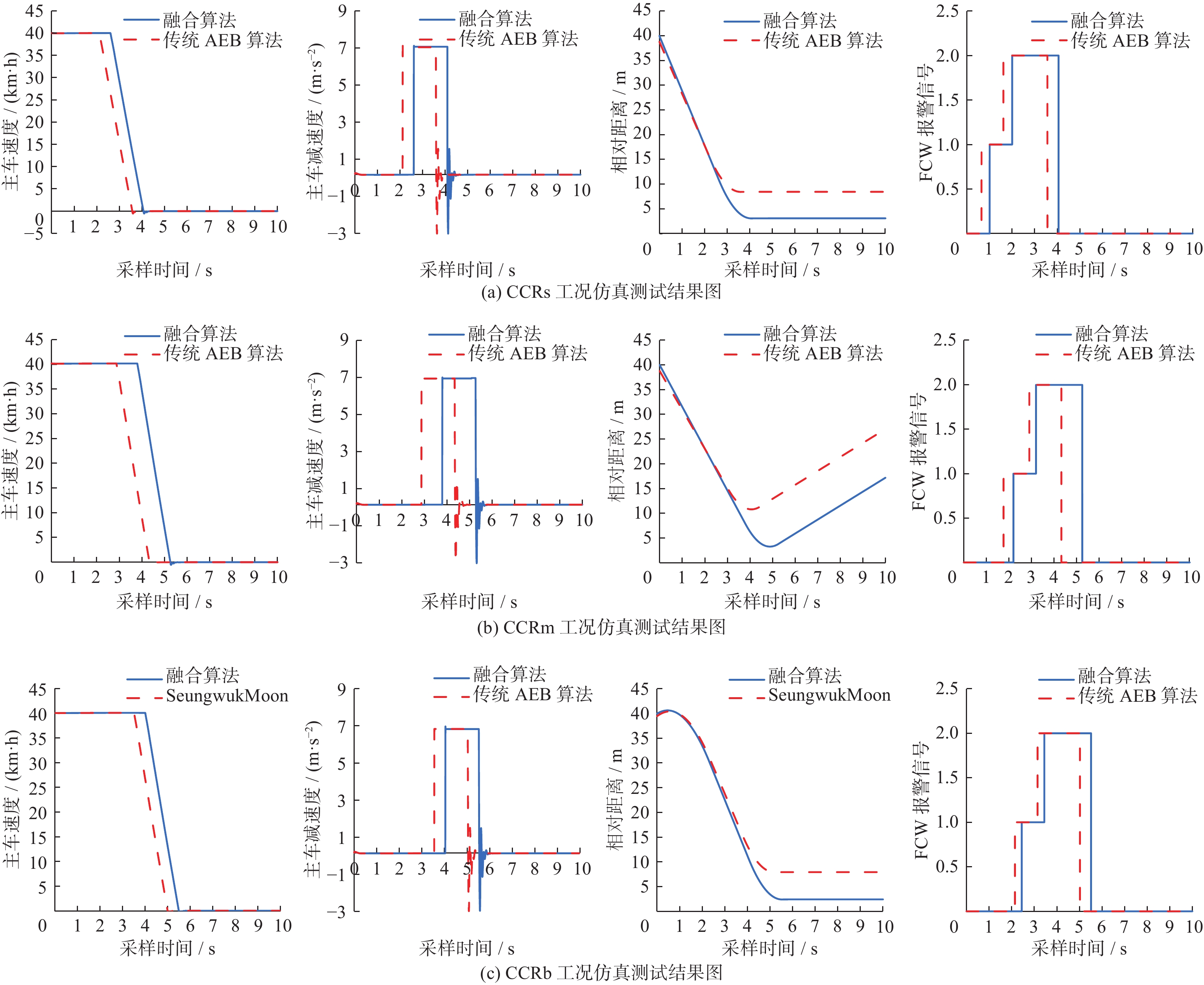
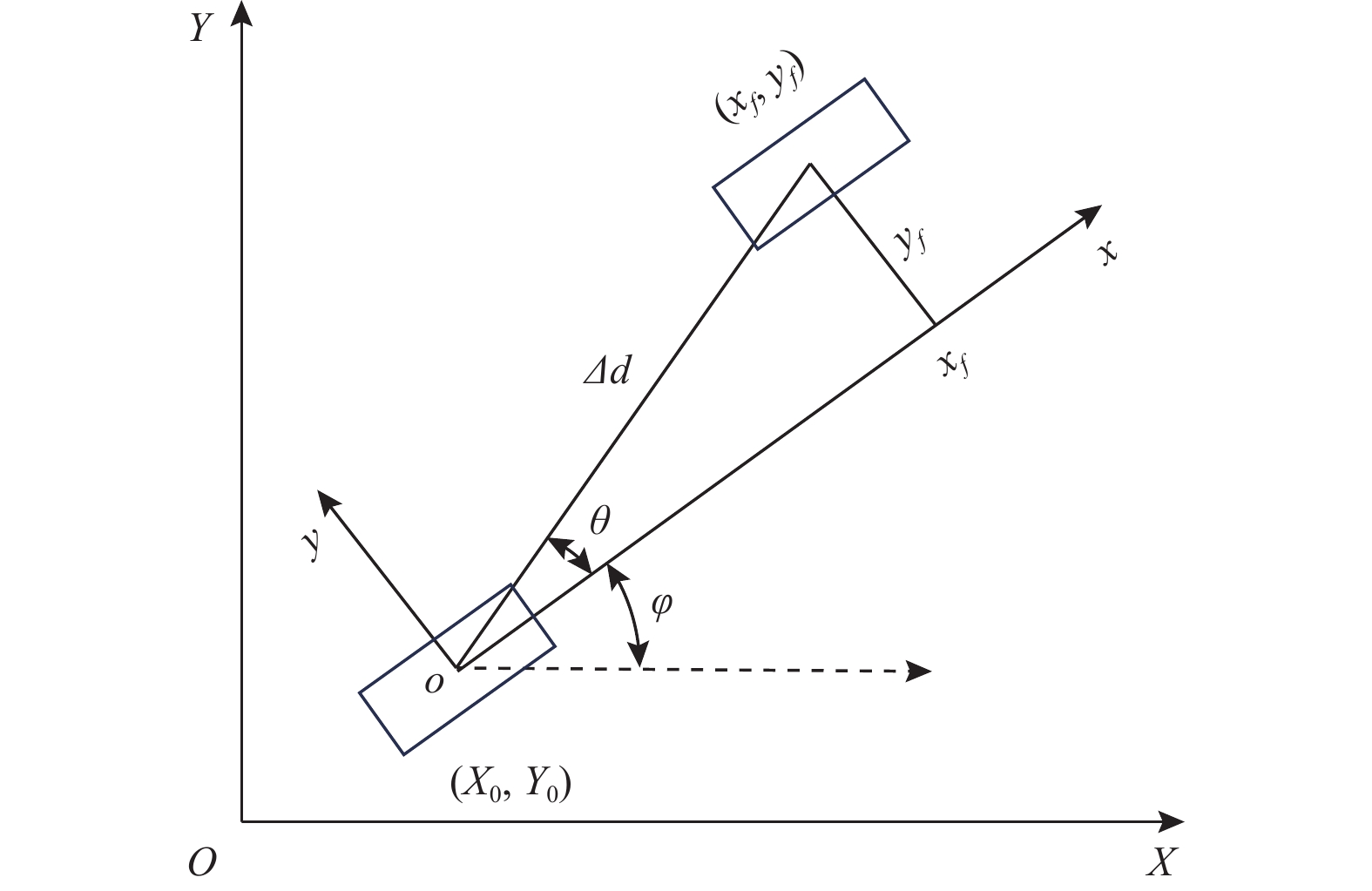
摘要: 针对现有的自动紧急制动(autonomous emergency braking, AEB)系统在弯道工况下存在误识别的情况,提出一种基于曲线坐标转换法的目标识别方法。通过传感器反映道路模型几何信息,利用曲线坐标转换法定位主车与目标车辆的位置,计算车辆之间的相对距离,采用逻辑门限制法确定危险目标车辆。针对基于安全距离模型或者碰撞时间(time to collision,TTC)算法的传统避撞算法无法兼顾制动过程中的安全性和舒适性问题,提出一种融合优化的Honda算法和TTC算法的纵向避撞控制策略。利用TTC算法作为前向碰撞预警策略,根据优化的Honda算法设计自动紧急制动策略。仿真结果表明,基于曲线坐标变换的方法能够精确计算主车与目标车辆之间的距离,准确且高效地识别危险目标车辆,基于安全距离算法和TTC算法协同控制的融合算法有效避免车辆纵向跟驰碰撞,兼顾了紧急制动过程的安全性和舒适性。Abstract: A target recognition method based on curve coordinate transformation was proposed to address the challenge of misidentification in existing automatic emergency braking (AEB) systems under curved conditions. The geometric information of the road model could be reflects through sensors, the curve coordinate transformation method was used to locate the position of the main vehicle and the target vehicle, the relative distance between vehicles were calculated, and the dangerous target vehicle was determined by using the logic gate restriction method. A longitudinal collision avoidance control strategy combining the Honda algorithm and TTC algorithm were proposed to address the traditional collision avoidance algorithms based on the safe distance model or time-to-collision (TTC) algorithm, which cannot balance the safety and comfort issues during the braking process. Using the TTC algorithm as a forward collision warning strategy, and the autonomous emergency braking strategy was designed based on the optimized Honda algorithm. The simulation results show that the proposed method based on curve coordinate transformation can accurately calculate the distance between the main vehicle and the target vehicle, accurately and efficiently identify dangerous target vehicles. The fusion algorithm based on the collaborative control of the safety distance algorithm and TTC algorithm can effectively avoid longitudinal car following collisions, and take into account the safety and comfort of the emergency braking process.
-

图 3 弯道工况下车辆目标识别示意图
Figure 3. Schematic diagram of vehicle target recognition under curved conditions
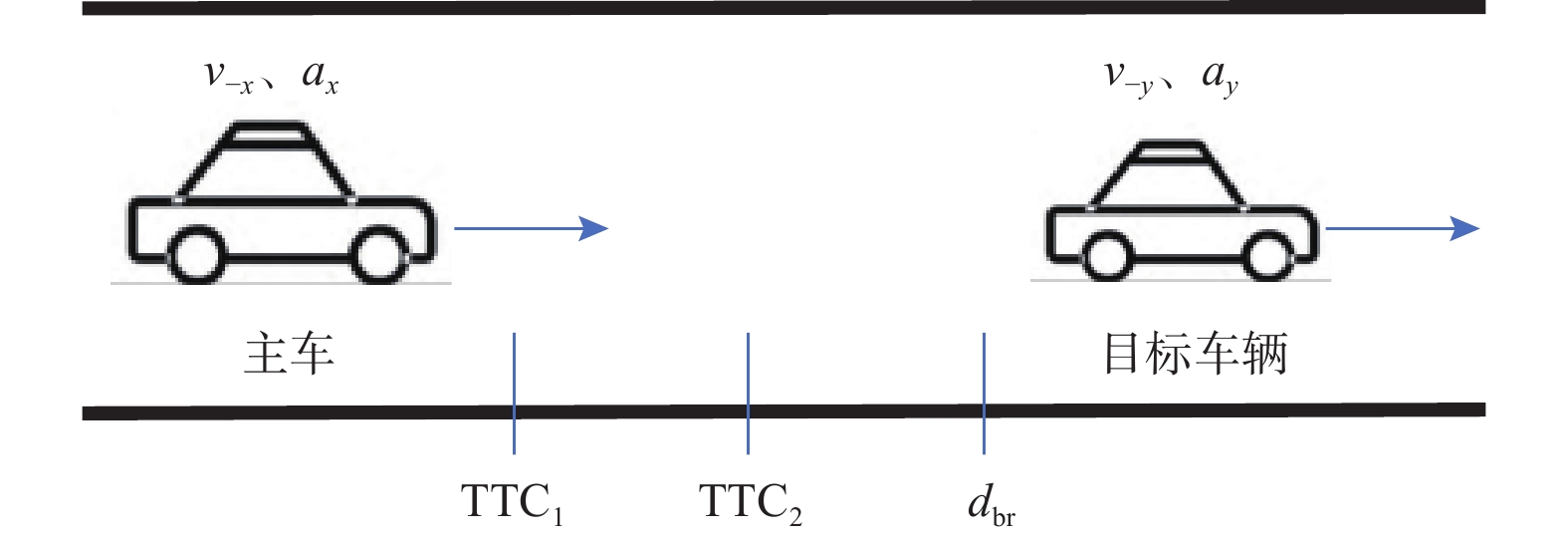
图 4 两车位置关系及TTC分级阈值
Figure 4. Position relationship between two vehicles and TTC classification threshold
图 5 弯道AEB系统控制逻辑示意图
Figure 5. Schematic diagram of control logic for AEB system in curved roads
图 6 改进前后的目标识别算法测试结果对比
Figure 6. Comparison of test results of target recognition algorithms before and after improvement
图 7 CCRs、CCRm与CCRb标准测试工况下的仿真结果
Figure 7. Simulation test results of CCRs, CCRm, CCRb Working Condition
表 1 测试工况
Table 1. Test Conditions
测试工况 目标车辆静止(CCRs) 目标车辆匀速(CCRm) 目标车辆减速(CCRb) 目标车辆速度/
(km·h−1)0 10 50 目标车辆加速度/
($ {{{\rm{m}}}\cdot{{\rm{s}}}}^{{-2}} $)0 0 −6  下载: 导出CSV
下载: 导出CSV
表 2 整车部分参数
Table 2. Partial parameters of entire vehicle
参数 数值 整车质量/kg 1412 质心至前轴距离/m 1.051 质心至后轴距离/m 1.859 质心高度/m 0.54 发动机功率/kW 125 轮距/m 1.675 轮胎规格 215/55 R17
下载: 导出CSV
-
[1] 马玉喆, 张顺舟, 丁能根. 弯道下商用车AEB的系统算法[J] . 江苏大学学报(自然科学版),2019,40(4):386 − 390. [2] ZHANG L, YU Z, XU X, et al. Research on automatic emergency braking system based on target recognition and fusion control strategy in curved road[J] . Electronics,2023,12(16):3490. doi: 10.3390/electronics12163490 [3] 黄城. 考虑舒适性的AEB控制策略研究[D]. 重庆: 西南大学, 2021. [4] 赵林峰, 张丁之, 王慧然, 等. 基于改进安全距离模型的人机协同纵向避撞研究[J] . 汽车工程,2021,43(4):588 − 600. [5] YIN S, YANG C, KAWSAR I, et al. Longitudinal predictive control for vehicle-following collision avoidance in autonomous driving considering distance and acceleration compensation[J] . Sensors,2022,22(19):7395. doi: 10.3390/s22197395 [6] BAE J J, LEE M S, KANG N. Partial and full braking algorithm according to time-to-collision for both safety and ride comfort in an autonomous vehicle[J] . International Journal of Automotive Technology,2020,21:351 − 360. doi: 10.1007/s12239-020-0033-8 [7] LAI F, YANG H, HUANG C Q. Automatic emergency collision avoidance of straight-crossing intelligent vehicle at a 90-degree intersection based on vehicle-to-everything technology[J]. SAE International Journal of Transportation Safety, 2023, 11(3). DOI: 10.4271/09-11-03-0010. [8] 兰凤崇, 余蒙, 李诗成, 等. 考虑预碰撞时间的自动紧急制动系统分层控制策略研究[J] . 汽车工程,2020,42(2):206 − 214. [9] JEON S, KIM B. V2V-based evaluation of overtaking risk in curved road conditions[J] . International Journal of Applied Engineering Research,2016,11(2):1104 − 1108. [10] CHU K, LEE M, SUNWOO M. Local path planning for off-road autonomous driving with avoidance of static obstacles[J] . IEEE Transactions on Intelligent Transportation Systems,2012,13(4):1599 − 1616. doi: 10.1109/TITS.2012.2198214 [11] 胡远志, 吕章洁, 刘西. 基于PreScan的AEB系统纵向避撞算法及仿真验证[J] . 汽车安全与节能学报,2017,8(2):136 − 142. doi: 10.3969/j.issn.1674-8484.2017.02.004 [12] 徐杰, 李博, 霍克, 等. 基于Euro-NCAP的自动紧急制动系统算法开发[C]//2014第十七届汽车安全技术学术会议论文集. 保定: 中国汽车工程学会汽车安全技术分会, 2014: 142−148. [13] COELINGH E, EIDEHALL A, BENGTSSON M. Collision warning with full auto brake and pedestrian detection-a practical example of automatic emergency braking[C]//Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems. Piscataway: IEEE, 2010: 155−160. [14] 辛佳庚, 杨复钰, 张宝迪, 等. 基于融合算法的电动汽车AEB控制策略[J] . 北京交通大学学报,2021,45(6):77 − 86, 93. doi: 10.11860/j.issn.1673-0291.20210029 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 2134
- HTML全文浏览量: 1083
- PDF下载量: 425
- 被引次数: 0
