

Intelligent wheelchair obstacle avoidance design based on fuzzy PID control
-
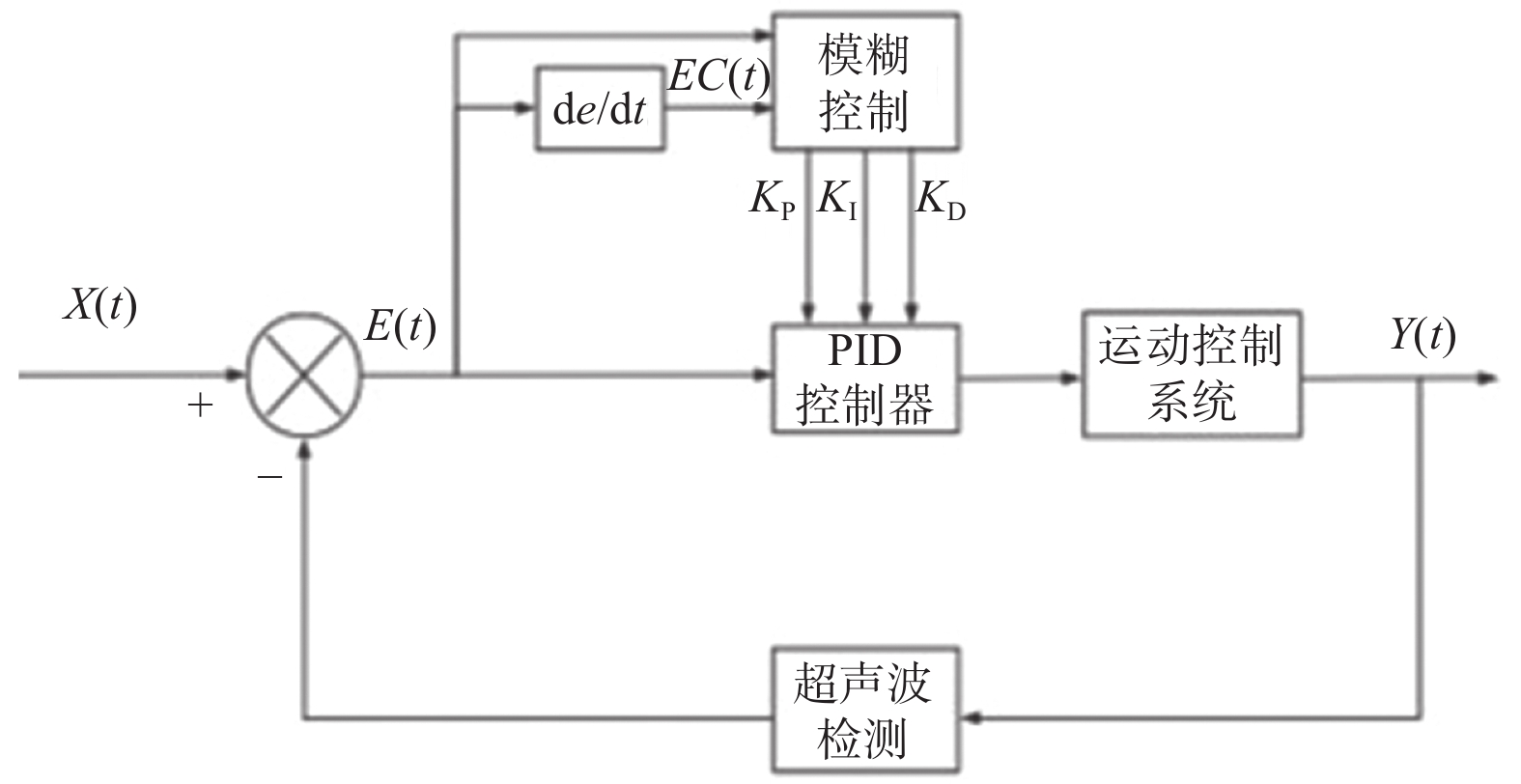
摘要: 为提高智能轮椅的避障精度,提出一种基于模糊PID控制的智能轮椅控制算法。建立智能轮椅的运动学模型,在传统PID控制方法的基础上,设计基于模糊PID控制的智能轮椅控制系统。使用Matlab构建仿真试验,在Simulink中设计搭建模糊控制器,并对传统PID控制和模糊PID控制的避障性能进行仿真。试验结果表明:该控制算法可实现智能轮椅避障误差的优化,与传统PID控制算法相比较,具有超调量小,响应快、精确度更高的优点。Abstract: In order to improve obstacle avoidance accuracy of intelligent wheelchair, a control algorithm of intelligent wheelchair based on fuzzy PID control was proposed. The kinematics model of intelligent wheelchair was established, and the intelligent wheelchair control system based on Fuzzy PID control was designed on the basis of traditional PID control method. Matlab was used to construct simulation tests, the fuzzy controller was designed and constructed in Simulink, and the obstacle avoidance performances of traditional and fuzzy PID control were simulated. The experimental results show that the control algorithm can optimize the obstacle avoidance error of intelligent wheelchair, and it has advantages of small overshoot, fast response, and higher accuracy compared with the traditional PID control algorithm.
-
Key words:
- intelligent wheelchair /
- fuzzy PID control /
- obstacle avoidance
-
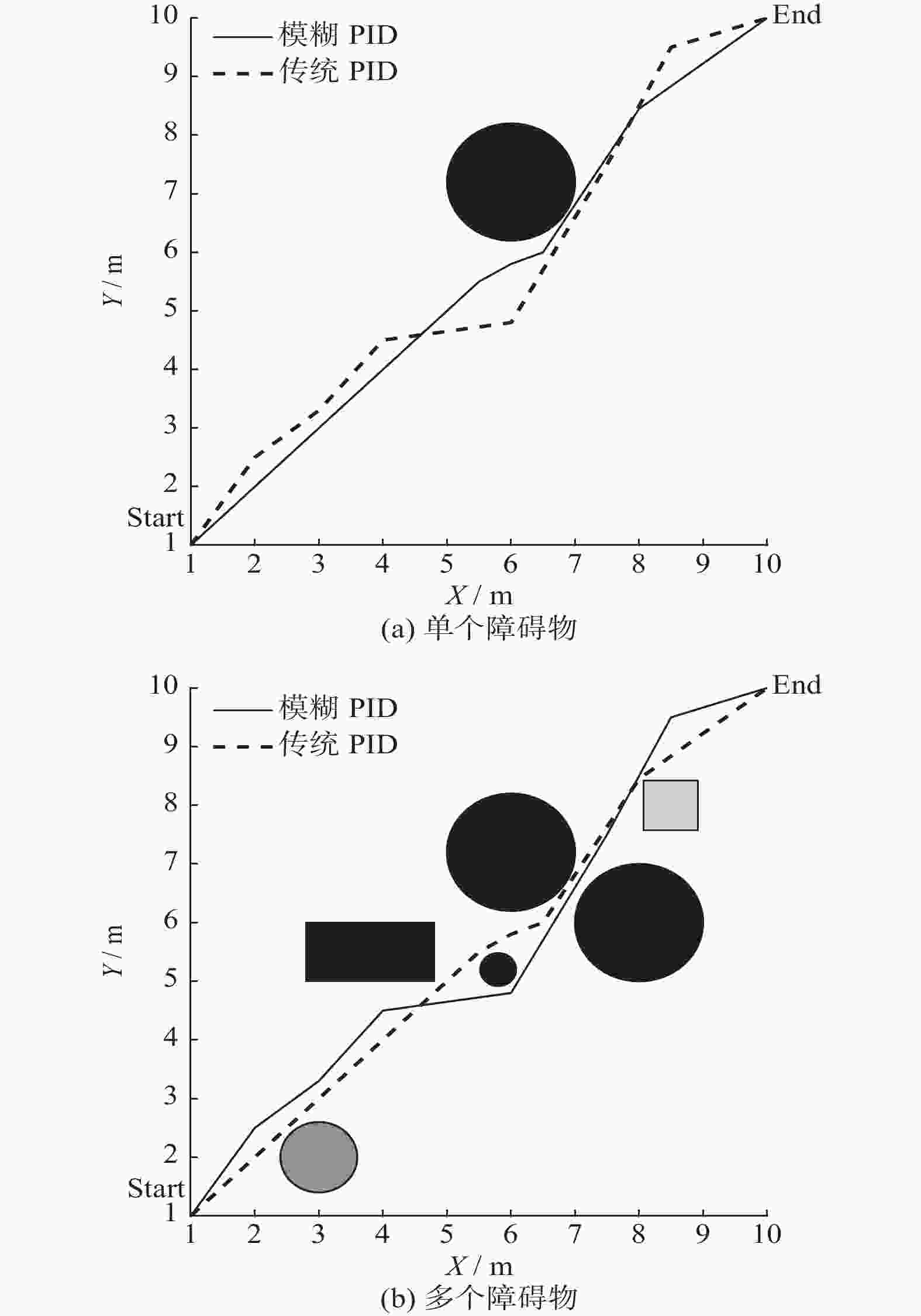
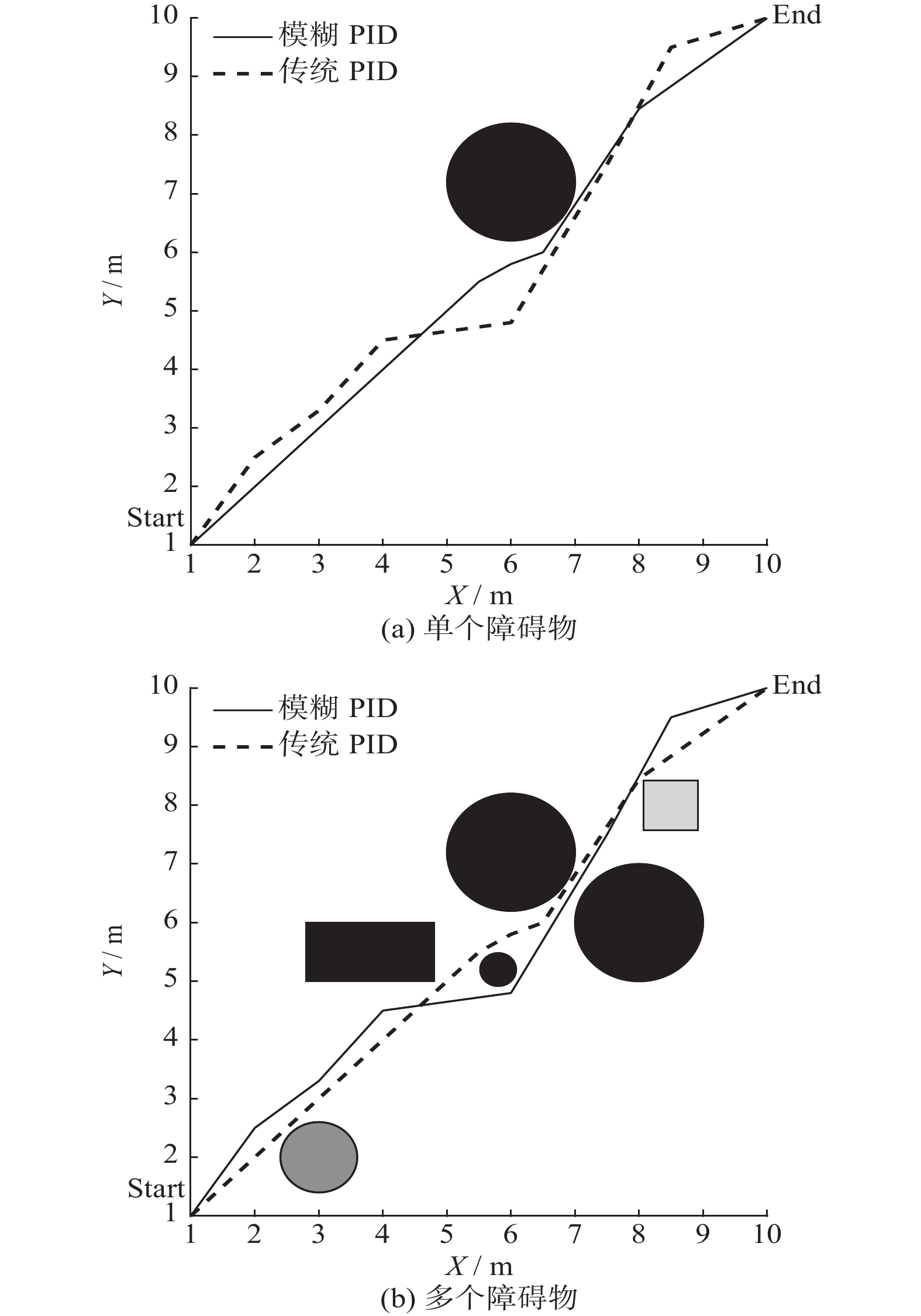
图 10 轮椅避障仿真轨迹图
Figure 10. Simulation trajectory chart for wheelchair obstacle avoidance
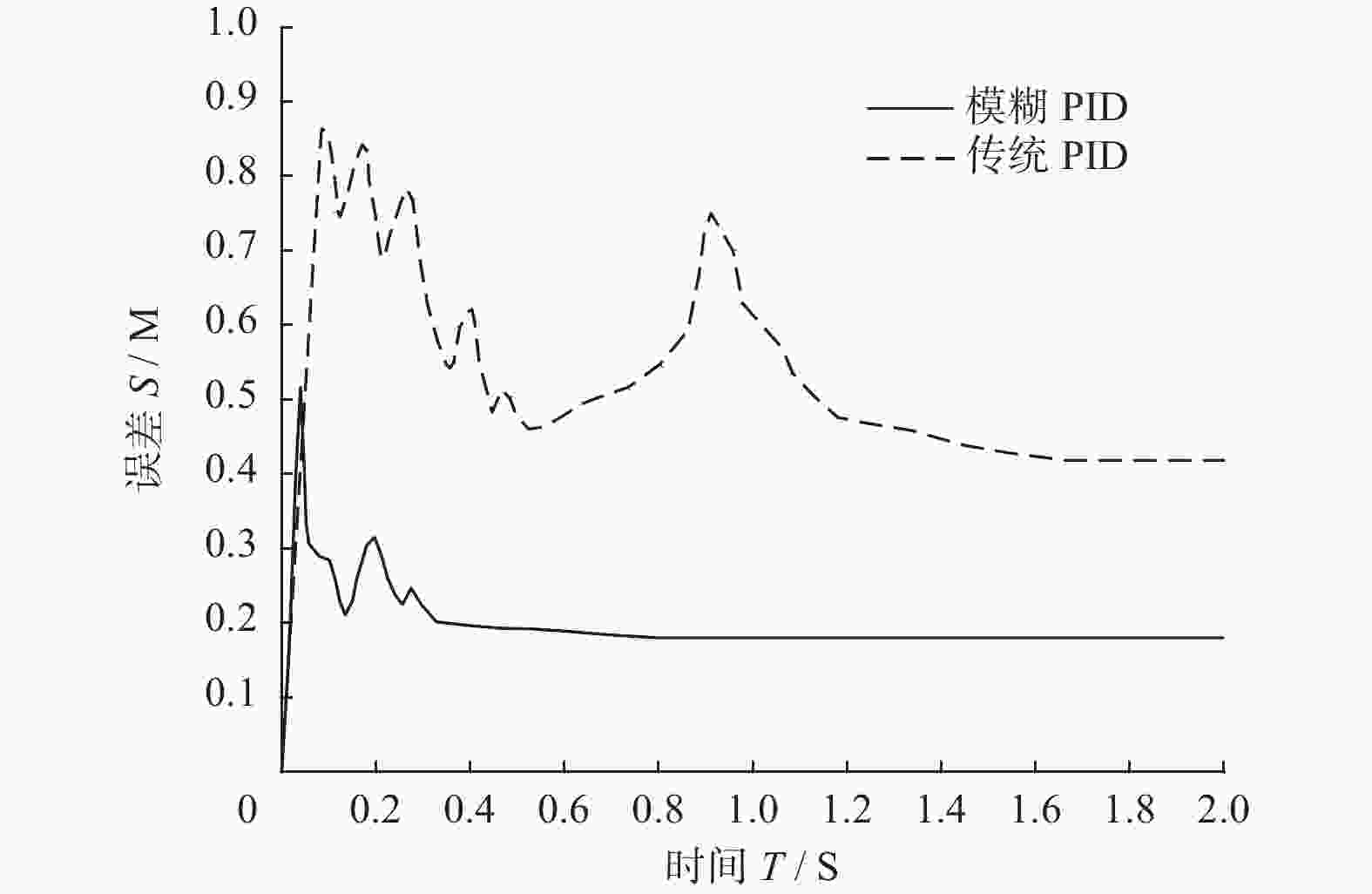
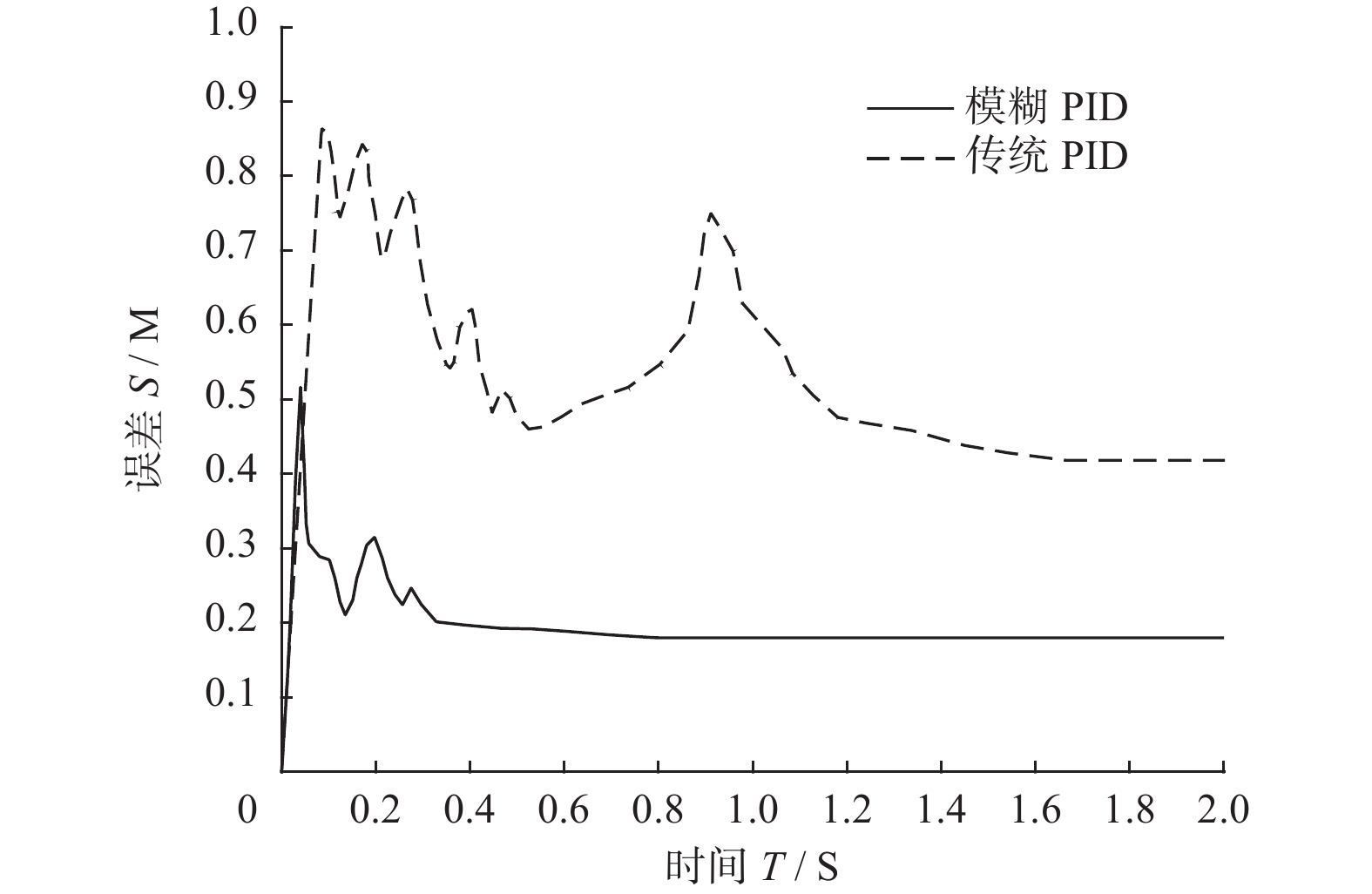
图 11 传统PID与模糊PID控制输出误差曲线
Figure 11. Output error curve of traditional PID and fuzzy PID control
表 1 模糊PID参数量化表
Table 1. Quantization table of fuzzy PID parameters
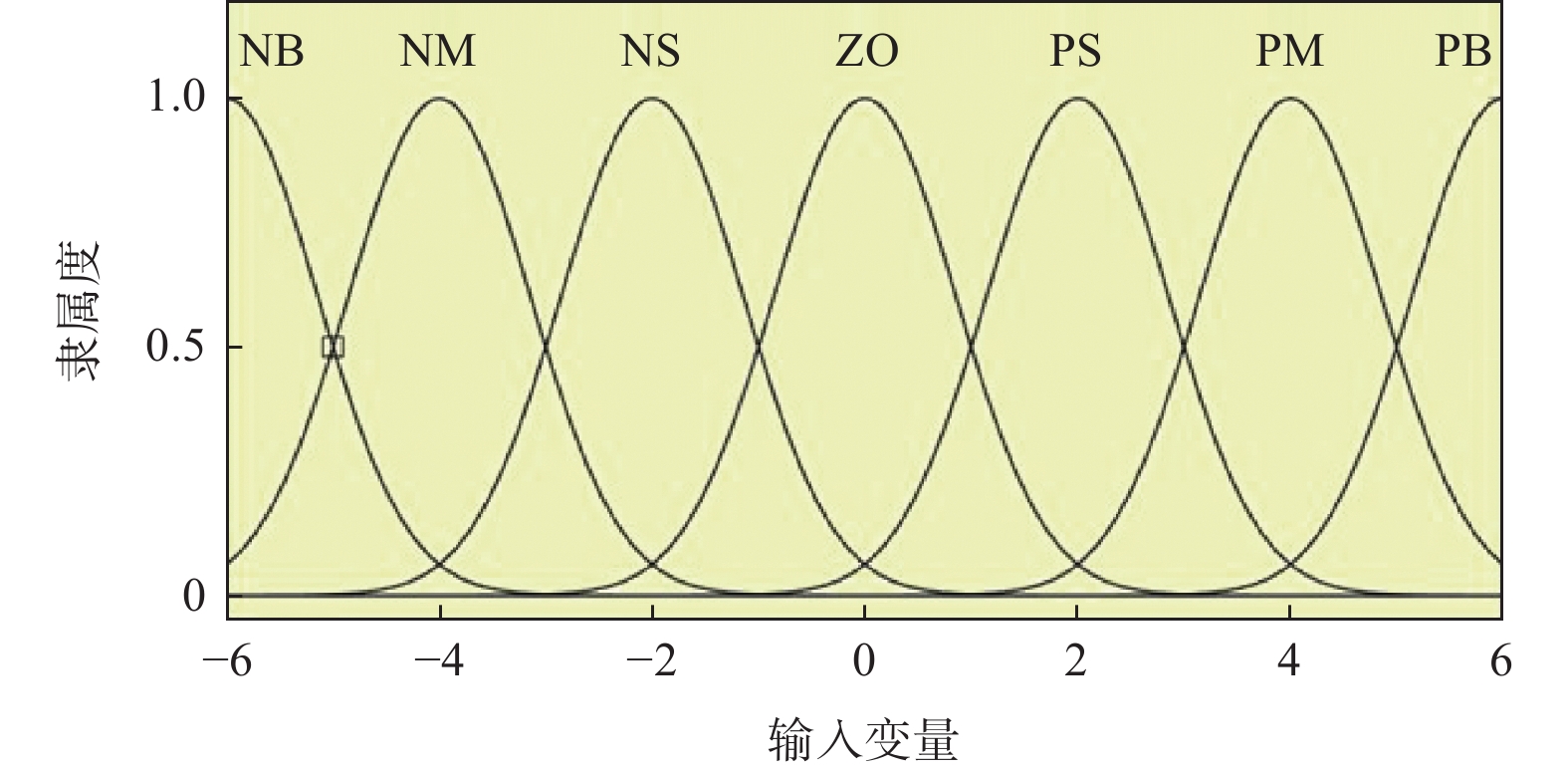
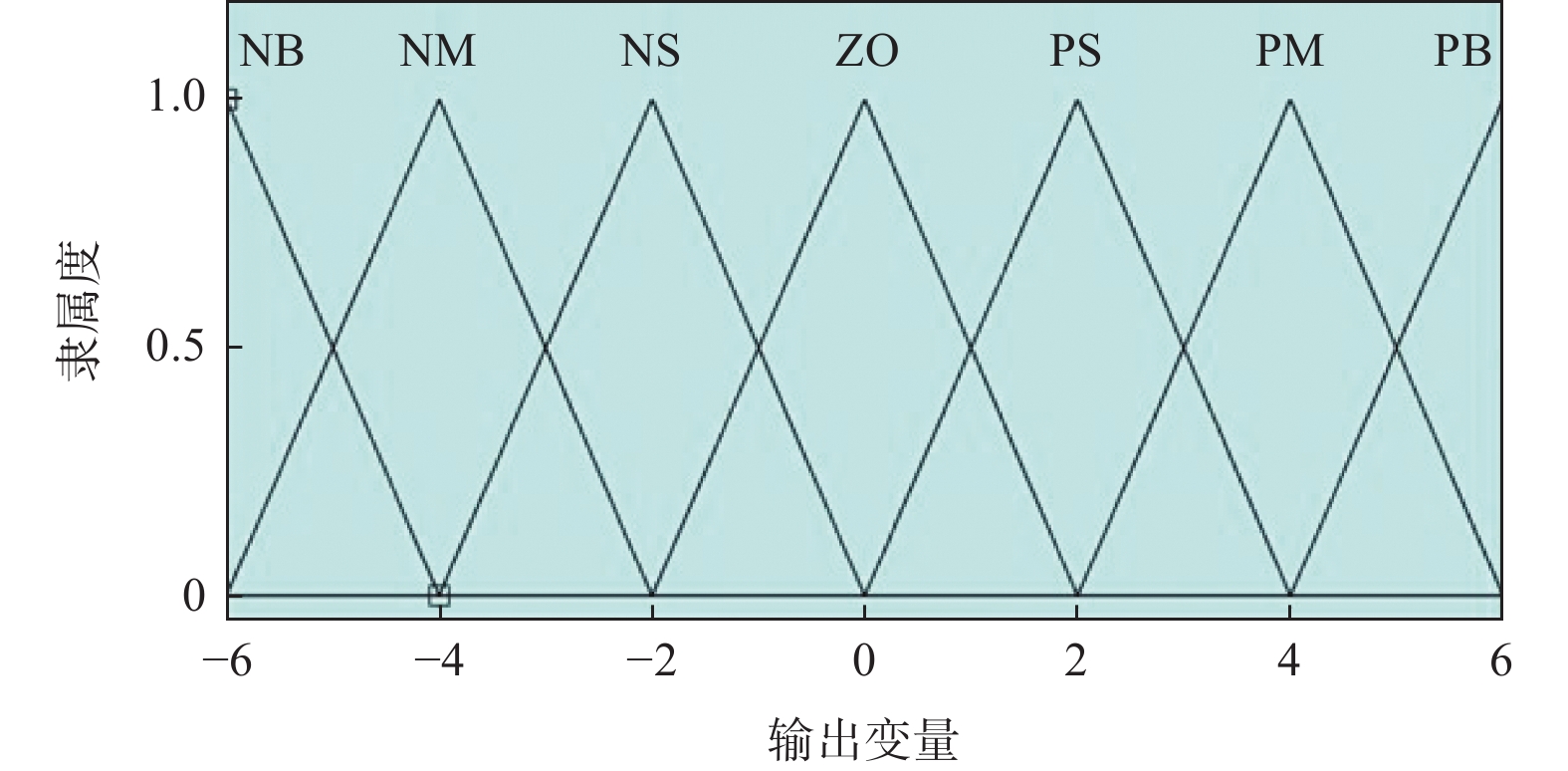
变量 E EC KP KI KD 模糊论域 [−6 6] [−6 6] [−6 6] [−6 6] [−6 6] 实际论域 [−50 50] [−100 100] [−5 5] [−1 1] [−15 15] 量化因子 0.12 0.06 — — — 比例因子 — — 0.833 0.167 2.5  下载: 导出CSV
下载: 导出CSV
表 2 模糊控制规则表
Table 2. Fuzzy control rule table
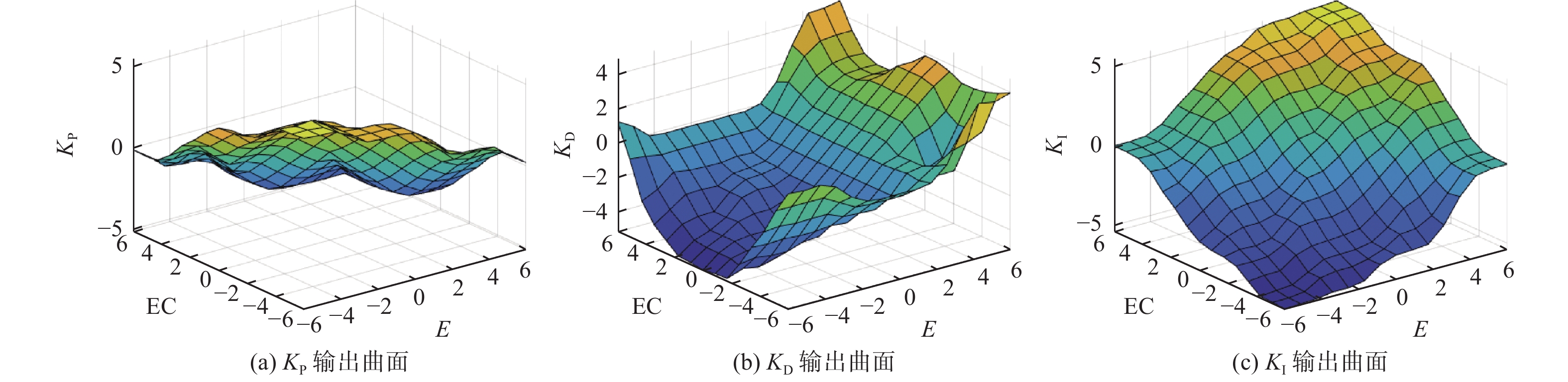
输入变量 NB NM NS ZO PS PM PB NB PB/NB/PS PB/NB/PS PM/NB/ZO PM/NM/ZO PS/NM/ZO PS/ZO/PB ZO/ZO/PB NM PB/NB/NS PB/NB/NS PM/NM/NS PM/NM/NS PS/NS/ZO ZO/ZO/NS ZO/ZO/PM NS PM/NM/NB PM/NM/NB PM/NS/NM PS/NS/NS ZO/ZO/ZO NS/PS/PS NS/PS/PM ZO PM/NM/NB PS/NS/NM PS/NS/NM ZO/ZO/NS NS/PS/ZO NM/PS/PS NM/PM/PM PS PS/NS/NB ZO/ZO/NM ZO/ZO/NS NS/PS/NS NS/PS/ZO NM/PM/PS NM/PM/PS PM ZO/ZO/NM ZO/ZO/NS NS/PS/NS NM/PM/NS NM/PM/ZO NM/PB/PS NB/PB/PS PB ZO/ZO/PS NS/ZO/ZO NS/PS/ZO NM/PM/ZO NM/PB/ZO NB/PB/PB NB/PB/PB
下载: 导出CSV
表 3 对比试验测试结果
Table 3. Comparison of experimental test results
避障算法 路径长度/m 耗时/s 最大误差/m 传统PID 8.5 21.35 0.48 模糊PID 5.7 14.10 0.15
下载: 导出CSV
-
[1] INOUE R S, TERRA M H, LEÃO W M, et al. Robust recursive linear quadratic regulator for wheeled mobile robots based on optical motion capture cameras[J] . Asian Journal of Control,2019,21(4):1605 − 1618. doi: 10.1002/asjc.2058 [2] 王战雷. 基于超声波的智能轮椅避障的研究[D]. 天津: 河北工业大学, 2007. [3] FERNANDO T, GAMMULLE H, WALGAMPAYA C. Fuzzy logic based mobile robot target tracking in dynamic hostile environment[C]// Proceedings of 2015 IEEE International Conference on Computational Intelligence and Virtual Environments for Measurement Systems and Applications (CIVEMSA). Beijing: IEEE, 2015: 1−6. [4] FAISAL M, HEDJAR R, Al SULAIMAN M, et al. Fuzzy logic navigation and obstacle avoidance by a mobile robot in an unknown dynamic environment[J] . International Journal of Advanced Robotic Systems,2013,10(1):37. doi: 10.5772/54427 [5] ANDURKAR A G, TANKAR R. Fuzzy logic based path navigation for robot using Matlab[J] . International Research Journal of Engineering and Technology,2017,4:3165 − 3170. [6] FERNANDO T, GAMMULLE H, WALGAMPAYA C. Fuzzy logic based framework for mobile robot navigation with target tracking[J] . International Journal of Computer Science and Network,2015,4(5):761 − 770. [7] CHAO C H, HSUEH B Y, HSIAO M Y, et al. Fuzzy target tracking and obstacle avoidance of mobile robots with a stereo vision system[J] . International Journal of Fuzzy Systems,2009,11(3):183 − 191. [8] 简毅, 张月. 移动机器人全局覆盖路径规划算法研究进展与展望[J] . 计算机应用,2014,34(10):2844 − 2849. doi: 10.11772/j.issn.1001-9081.2014.10.2844 [9] RASHID A T, ALI A A, FRASCA M, et al. Path planning with obstacle avoidance based on visibility binary tree algorithm[J] . Robotics and Autonomous Systems,2013,61(12):1440 − 1449. doi: 10.1016/j.robot.2013.07.010 [10] MABROUK M H, MCINNES C R. Solving the potential field local minimum problem using internal agent states[J] . Robotics and Autonomous Systems,2008,56(12):1050 − 1060. doi: 10.1016/j.robot.2008.09.006 [11] 马文宇, 许云猛, 王玉甲. 改进人工势场法的水陆两栖机器人路径规划[J] . 组合机床与自动化加工技术,2022(12):10 − 13, 17. [12] 郜园园, 朱凡, 宋洪军. 进化操作行为学习模型及在移动机器人避障上的应用[J] . 计算机应用,2013,33(8):2283 − 2288. [13] XU Q, KAN J M, CHEN S N, et al. Fuzzy PID based trajectory tracking control of mobile robot and its simulation in Simulink[J] . International Journal of Control and Automation,2014,7(8):233 − 244. doi: 10.14257/ijca.2014.7.8.20 [14] 赵玉洁. 电动轮椅智能避障系统的研究[D]. 秦皇岛: 河北科技师范学院, 2017. [15] LIU F C, LIANG L H, GAO J. Fuzzy PID control of space manipulator for both ground alignment and space applications[J] . International Journal of Automation and Computing,2014,11(4):353 − 360. doi: 10.1007/s11633-014-0800-y [16] LIU W H, XIE Z. Design and simulation test of advanced secondary cooling control system of continuous casting based on fuzzy self-adaptive PID[J] . Journal of Iron and Steel Research, International,2011,18(1):26 − 30. doi: 10.1016/S1006-706X(11)60006-X [17] 杨欢莉, 杨熙鑫, 高鹏翔. 基于模糊自适应 PID 的智能车控制与仿真[J] . 青岛大学学报(然科学版),2020,33(2):1 − 5. [18] 邓传涛, 贺红林, 胡国友, 等. 飞行器自调平系统的模糊PID控制研究[J] . 机械设计与制造,2023(6):79 − 83. doi: 10.3969/j.issn.1001-3997.2023.06.016 -

 下载:
下载:


 点击查看大图
点击查看大图

计量
- 文章访问数: 1825
- HTML全文浏览量: 768
- PDF下载量: 404
- 被引次数: 0
