

Kinematic modeling and prototype test of flexible supernumerary robotic finger in grasping for the disabled
-
摘要: 提出一种可与伤残手臂进行协同抓取的可穿戴柔性外手指系统,对其结构和样机进行设计。建立外手指弯曲和抓取物品的运动学模型,获得驱动绳拉伸位移、指节关节角、末段指节位姿间的正逆运动学映射关系;对柔性外手指进行动力学仿真,获得无负载手指末端运动规律;通过试验搭建,柔性外手指样机可实现1.7倍于本体的物体稳定包络抓取。试验验证了运动学建模和结构设计的合理性,具有一定的实用性。Abstract: A wearable flexible supernumerary robotic finger system capable of collaborative grasping with disabled arms was proposed, and its structure and prototype were designed. A kinematic model for supernumerary robotic finger bending and grasping objects was established, the forward and inverse kinematic mapping relationship between the stretching displacement of the driving rope, the joint angle of the finger joint, and the pose of the end finger joint were obtained. The dynamics of the flexible supernumerary robotic fingers were carried out through simulation, the movement rules of the unloaded finger end were obtained. Through experimental construction, the flexible supernumerary robotic finger prototype can achieve stable envelope grasping of objects 1.7 times larger than the body. It verifies the rationality of kinematic modeling and structural design, and has certain practicality.
-

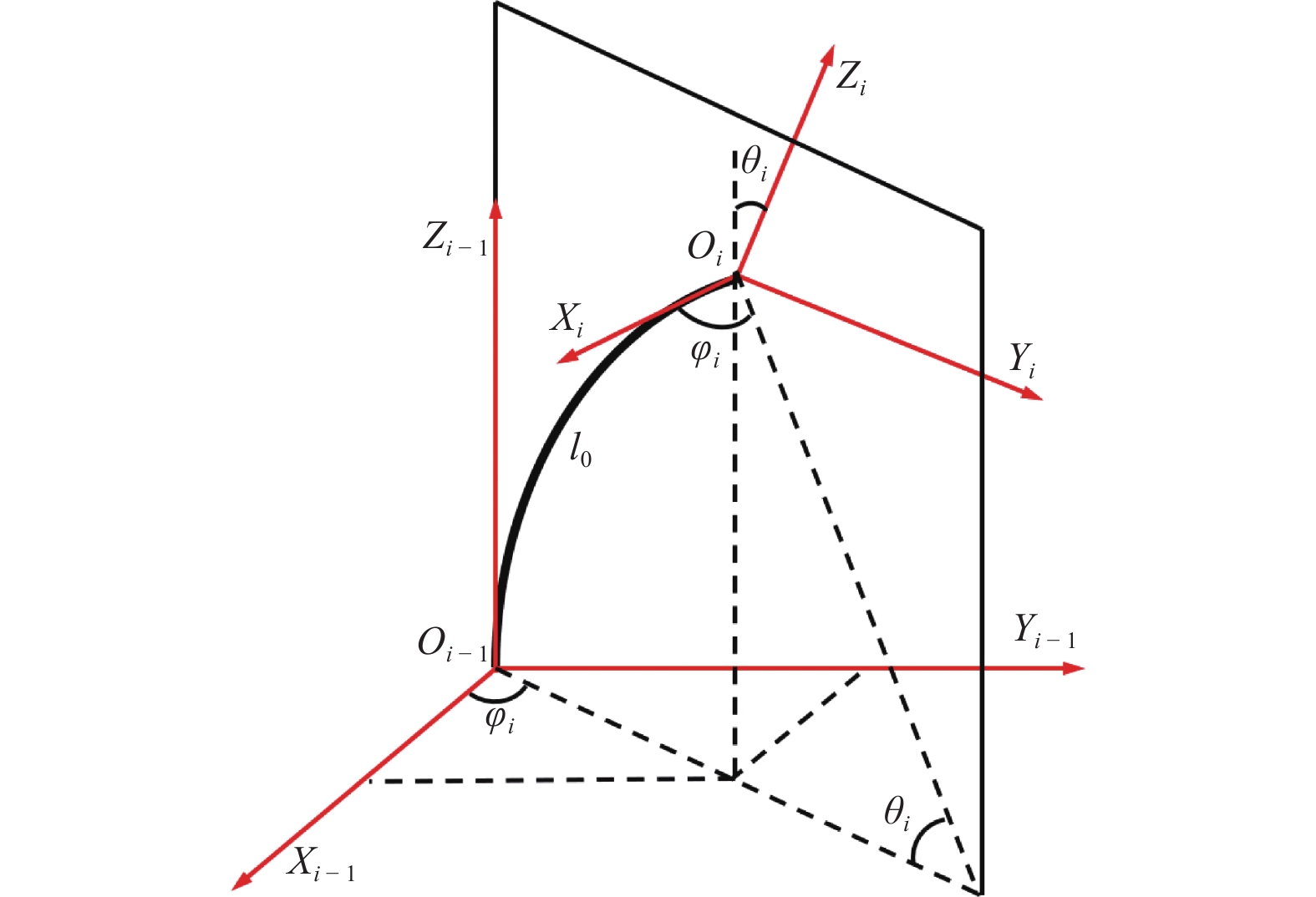
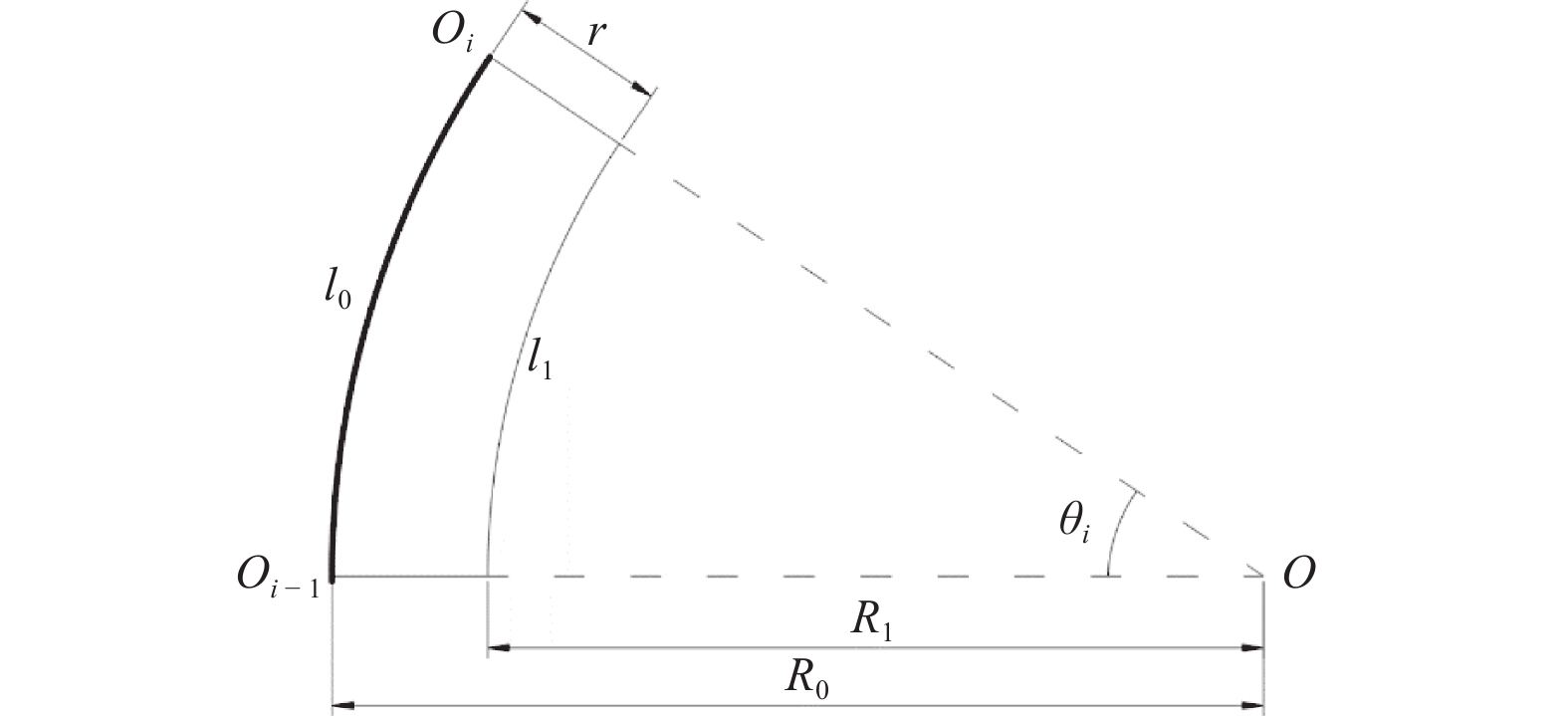
图 2 柔性外手指运动学参数间的映射关系
Figure 2. Mapping relationship between kinematic parameters of flexible supernumerary robotic finger
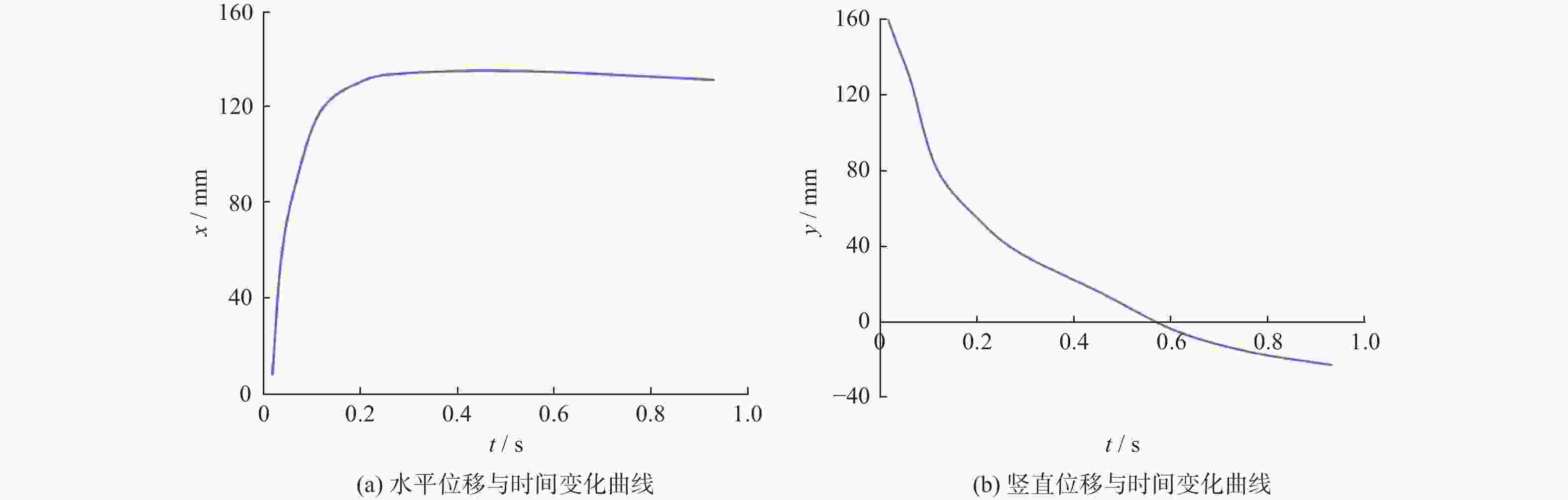
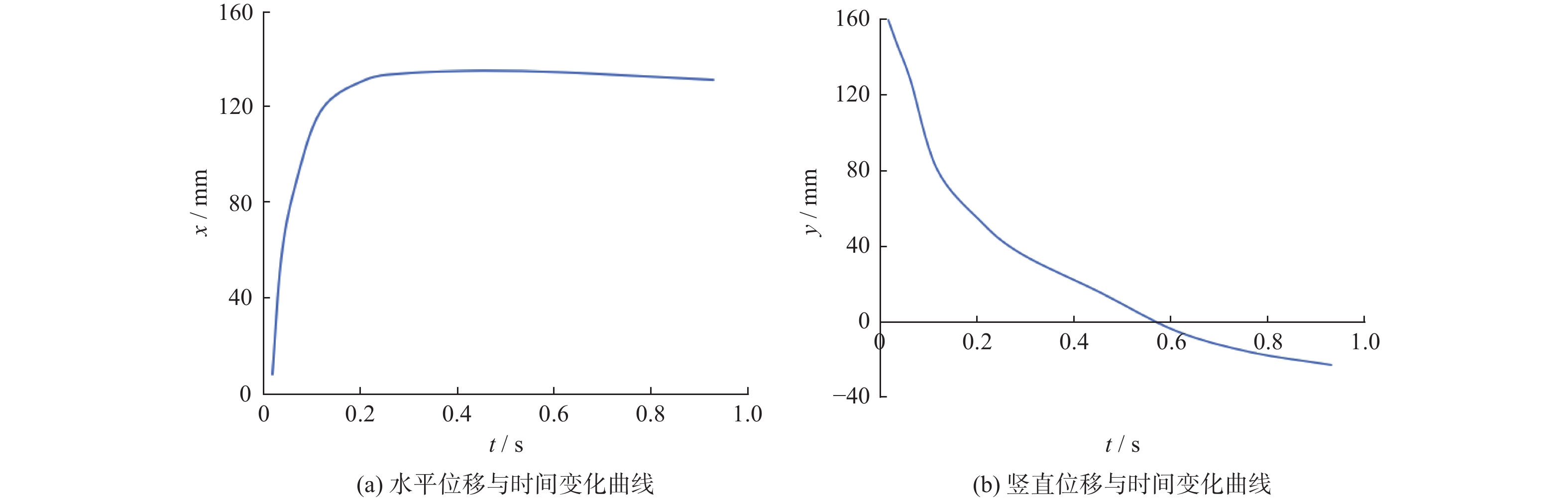
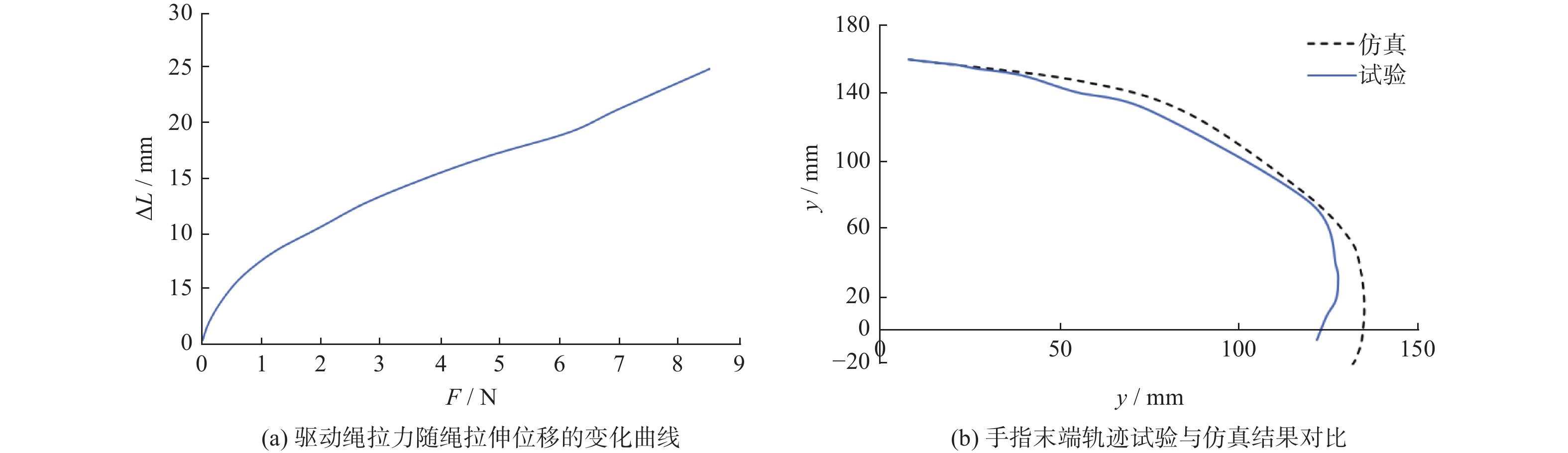
图 6 无负载动力学仿真中手指末端位移与时间变化曲线
Figure 6. Finger end displacement and time change curve in no-load dynamics simulation
-
[1] VALE, NICHOLAS M. User intent detection and control of a Soft Poly-Limb[D] .Tempe: Arizona State University, 2018. [2] LIANG X Q, CHEONG H, CHUI C K, et al. A fabric-based wearable soft robotic limb[J] . Journal of Mechanisms and Robotics , 2019, 11(3). DOI: 10.1115/1.4043024. [3] AL-SADA M, HÖGLUND T, KHAMIS M,et al. Orochi: investigating requirements and expectations for multipurpose daily used supernumerary robotic limbs[C] //Proceedings of the 10th Augmented Human International Conference 2019 (AH2019). New York: Association for Computing Machinery, 2019: 1–9. [4] 杨振光, 梁培栋, 陈君申, 等. 肩部可穿戴功能辅助机械臂: CN104825258A[P] . 2015−08−12. [5] 朱延河, 赵传武, 张宗伟, 等. 一种人体运动辅助两用式外手指机器人: CN110292510A[P] . 2019−12−13. [6] 黄剑, 霍军, 张梦诗, 等. 一种人体运动辅助两用式外手指机器人: CN110292510A [P] . 2019−10−01. [7] WU F Y, ASADA H H. “Hold-and-manipulate” with a single hand being assisted by wearable extra fingers[C] //Proceedings of 2015 IEEE International Conference on Robotics and Automation (ICRA). Seattle: IEEE, 2015: 6205–6212. [8] WU F, ASADA H. Supernumerary robotic fingers: An alternative upper-limb prosthesis[C] //Proceedings of ASME 7th Annual Dynamic Systems and Control Conference. San Antonio: American Society of Mechanical Engineers, 2014. [9] PRATTICHIZZO D, MALVEZZI M, HUSSAIN I, et al. The sixth-finger: A modular extra-finger to enhance human hand capabilities[C] //Proceedings of the 23rd IEEE International Symposium on Robot and Human Interactive Communication (IEEE RO-MAN). Edinburgh: IEEE, 2014: 993−998. [10] MALVEZZI M, IQBAL Z, VALIGI M C, et al. Design of multiple wearable robotic extra fingers for human hand augmentation[J] . Robotics , 2019, 8(4): 102. DOI: 10.3390/robotics8040102. [11] TIZIANI L, HART A, CAHOON T, et al. Empirical characterization of modular variable stiffness inflatable structures for supernumerary grasp-assist devices[J] . The International Journal of Robotics Research,2017,36(13/14):1391 − 1413. doi: 10.1177/0278364917714062 [12] PARK S, FRASER M, Weber L M, et al. User-driven functional movement training with a wearable hand robot after stroke[J] . IEEE transactions on neural systems and rehabilitation engineering,2020,28(10):2265−2275. doi: 10.1109/TNSRE.2020.3021691 [13] 谢斌, 蔡自兴. 基于MATLAB Robotics Toolbox的机器人学仿真实验教学[J] . 计算机教育, 2010(19): 140−143. doi: 10.3969/j.issn.1672-5913.2010.19.041 -

 下载:
下载:


 点击查看大图
点击查看大图
图(11)
计量
- 文章访问数: 935
- HTML全文浏览量: 551
- PDF下载量: 44
- 被引次数: 0
