

Response analysis of tethered UAV in dynamic wind environment
-
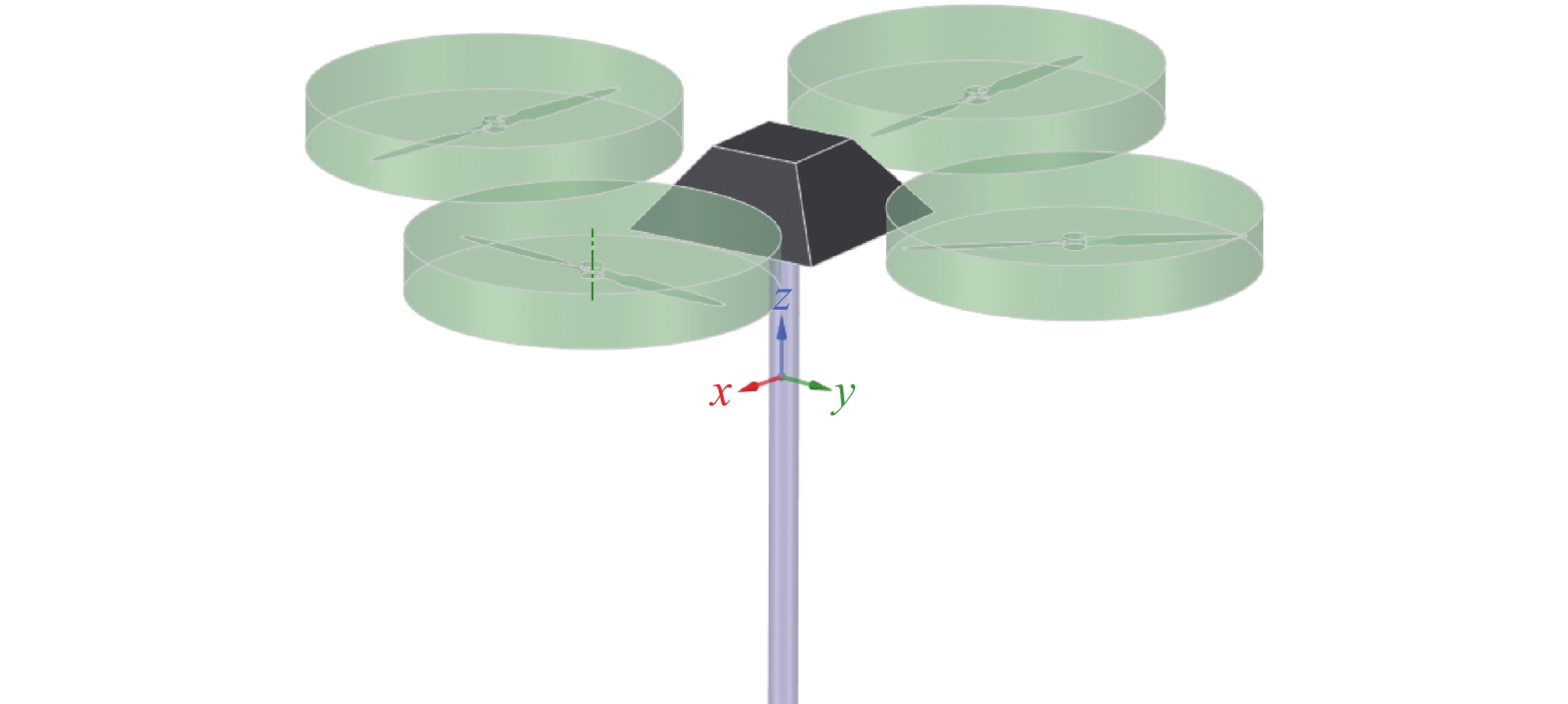
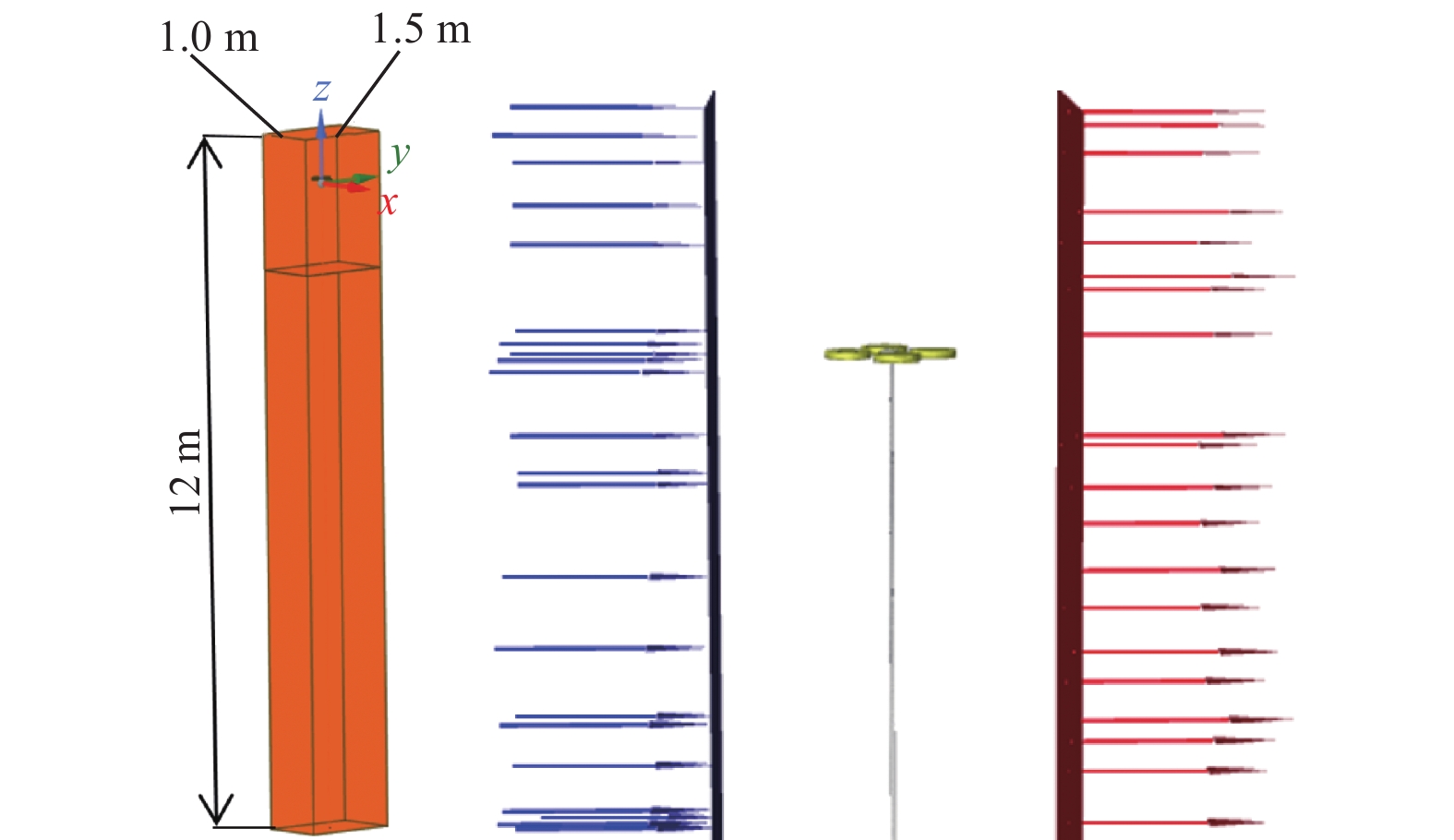
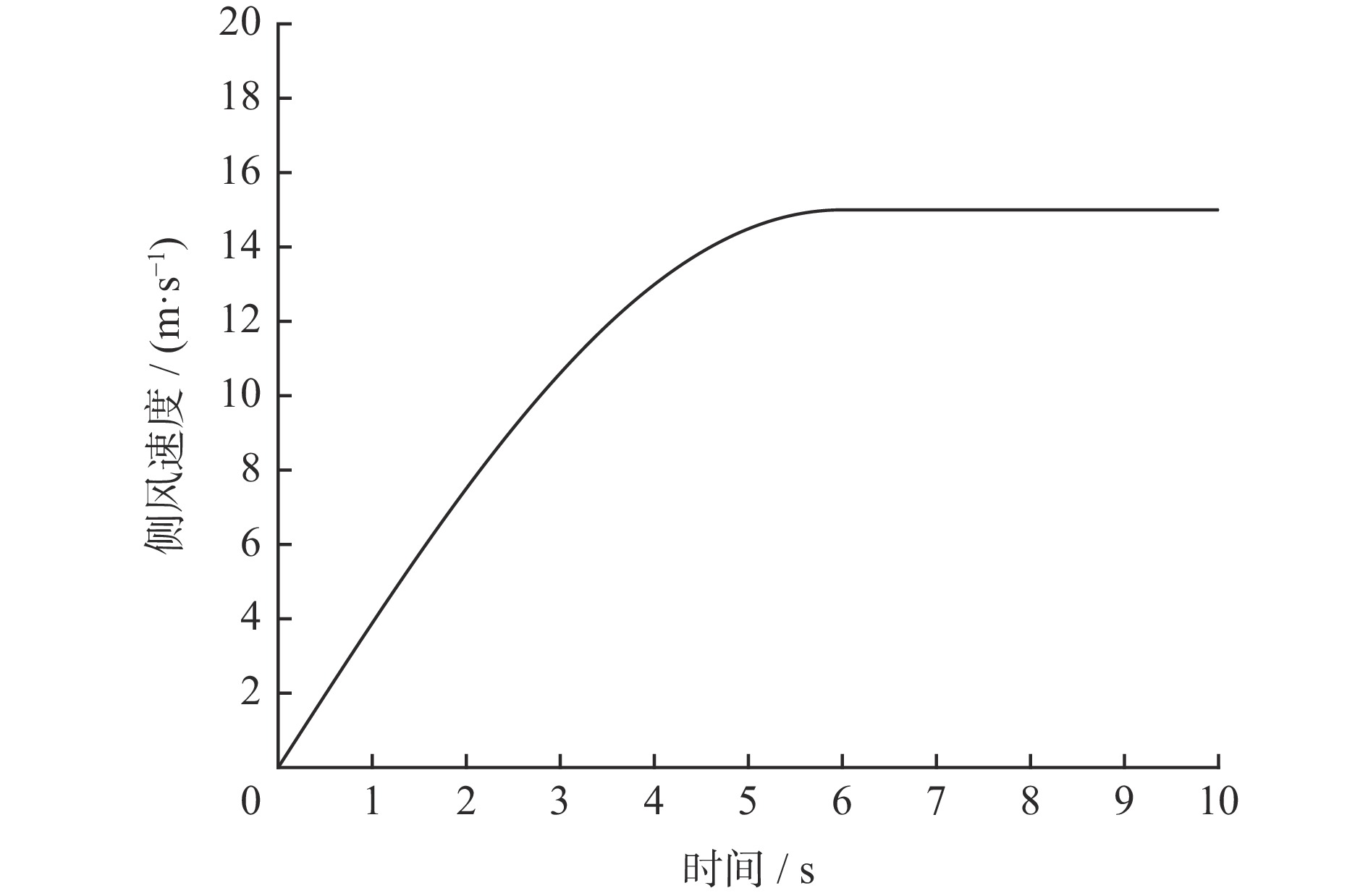
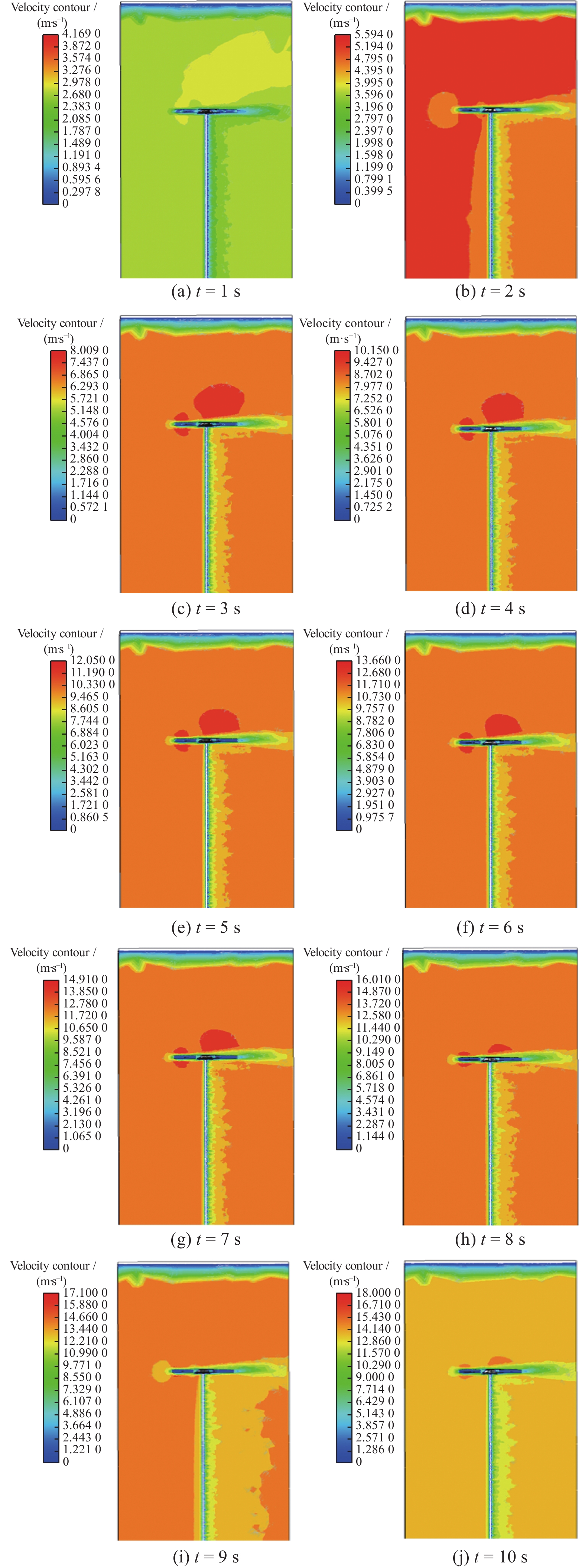
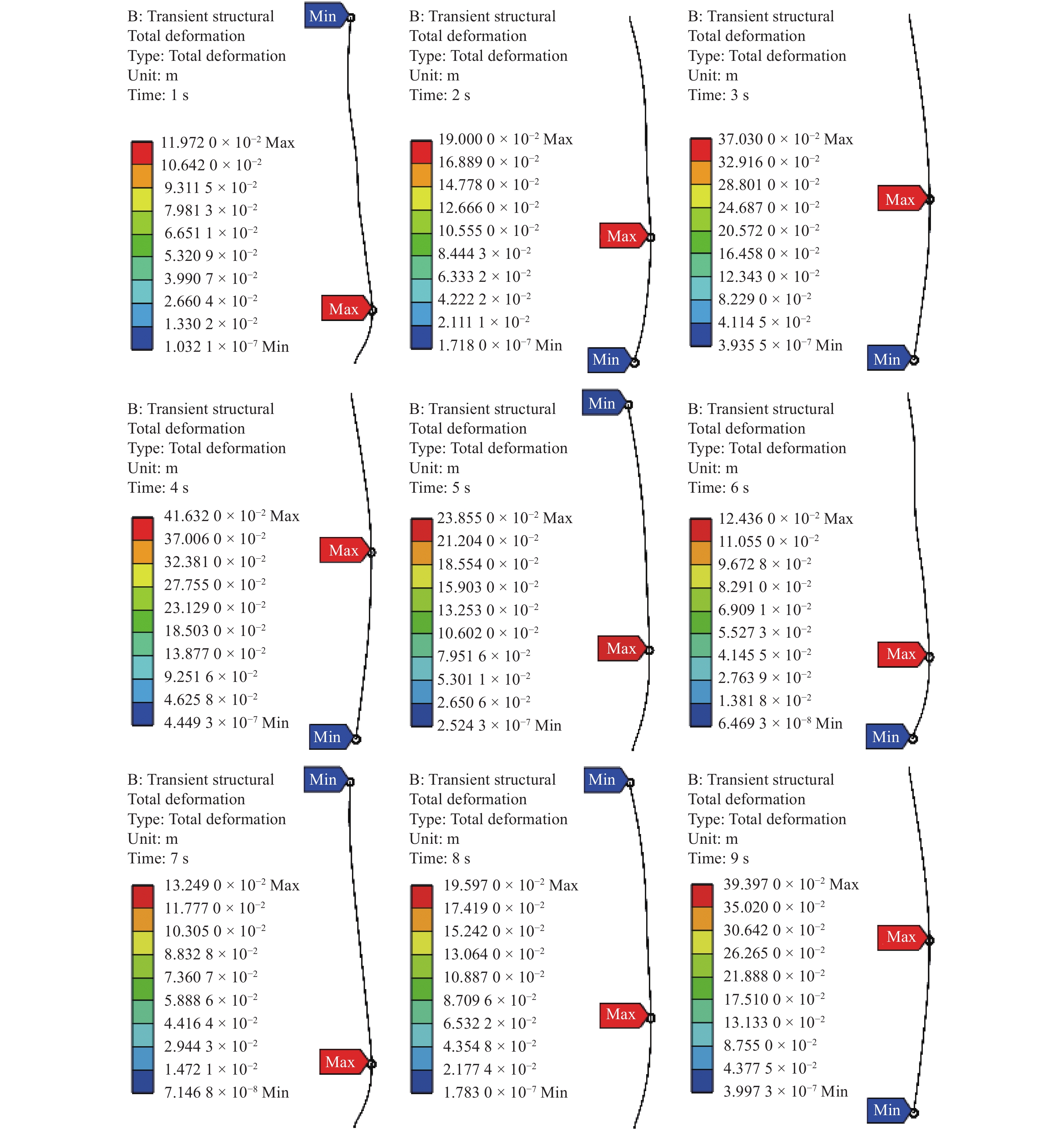
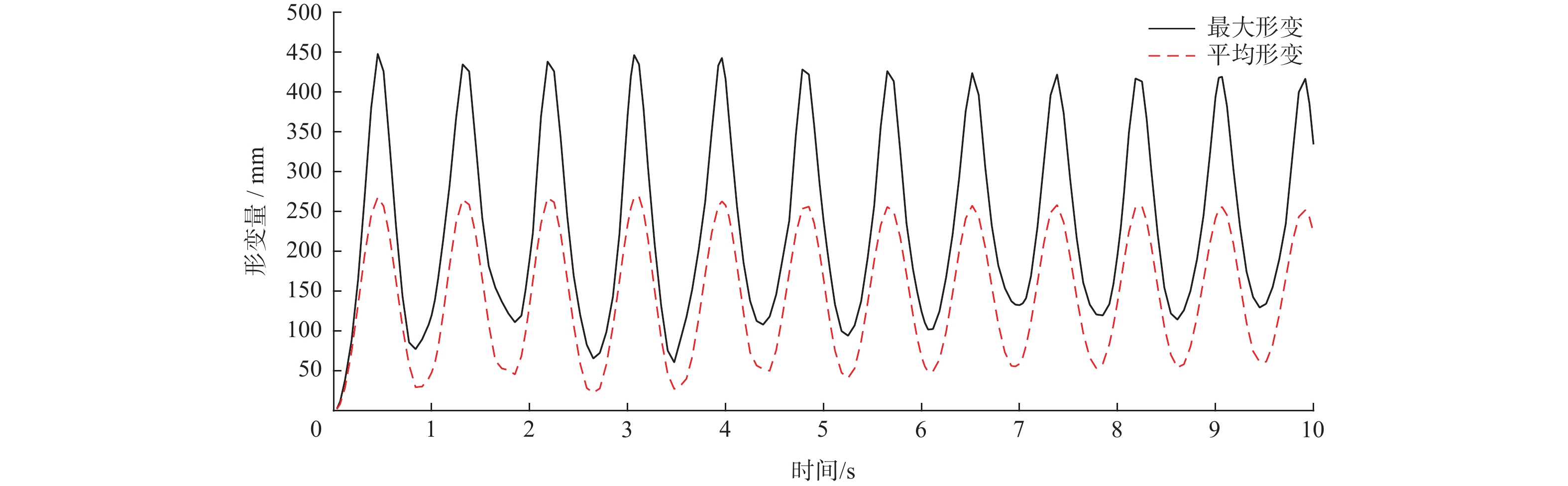
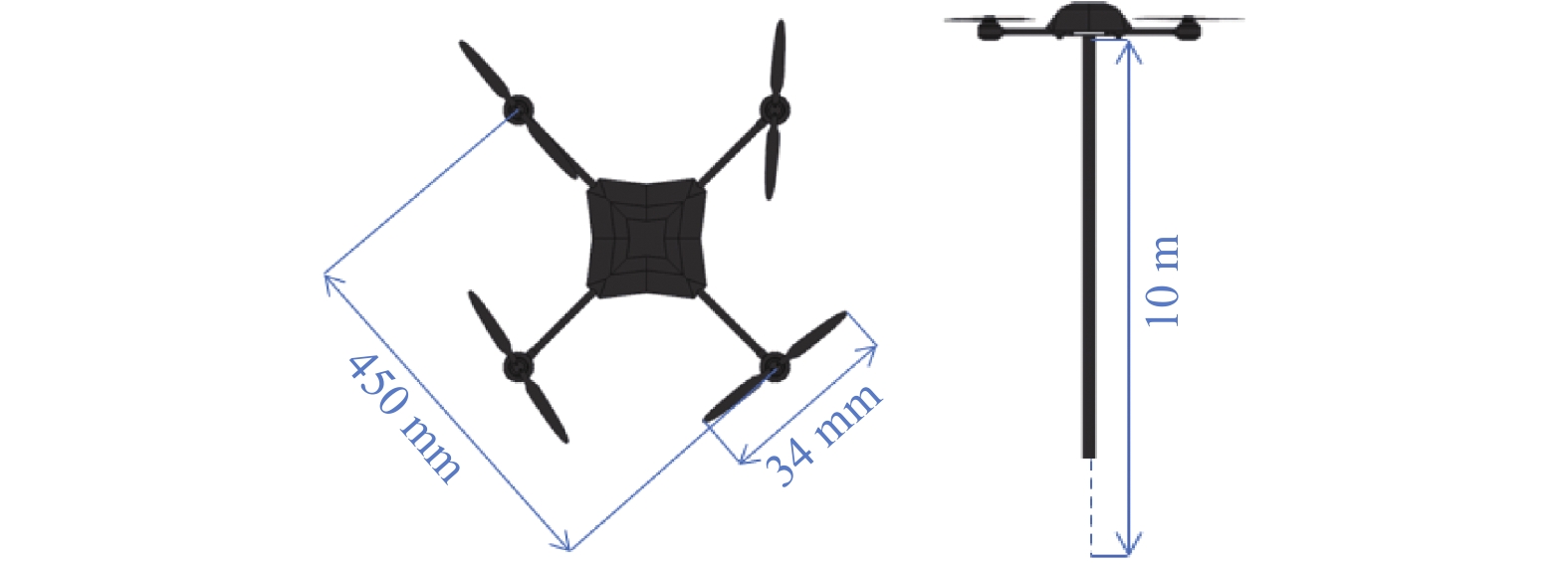
摘要: 为探究系留无人机(UAV)的气动性能以及线缆的变形情况,进行系留无人机的动力响应分析。构建系留无人机模型,采用流−固耦合的分析方法、标准k-ε湍流模型和滑移网格技术进行数值模拟,研究不同风速下侧风对系留无人机系统的动力学性能。结果表明,随着侧向风速增加,涡强度显著增加,来风一侧尤为明显。系缆在风力和自身重力的共同作用下发生形变,最大形变量出现在特定位置,且随风速变化而变化,最大形变量为448 mm,10 s内整体平均形变量为145 mm。这一结果可为系留无人机的设计和使用条件提供参考。Abstract: In order to investigate the aerodynamic performance of the tethered unmanned aerial vehicle (UAV) and the deformation of the tether, the dynamic response analysis of the tethered UAV was conducted. A tethered UAV model was developed, and numerical simulations were performed using using a fluid-structure interaction (FSI) analysis method, standard k-ε turbulence model, and slip-grid technology. The dynamic performance of the tethered UAV system under crosswinds at different wind speeds was investigated. The results shows that the vortex strength increases significantly with crosswind speed, particularly on the windward side. The tether deformed under the combined effect of wind and its gravity, and the maximum deformation occurs at a specific location and varies with wind speed. The maximum deformation was 448 mm, and the overall average deformation was 145 mm in 10 s. It can be used as a reference for the design and utilization conditions of tethered UAVs.
-
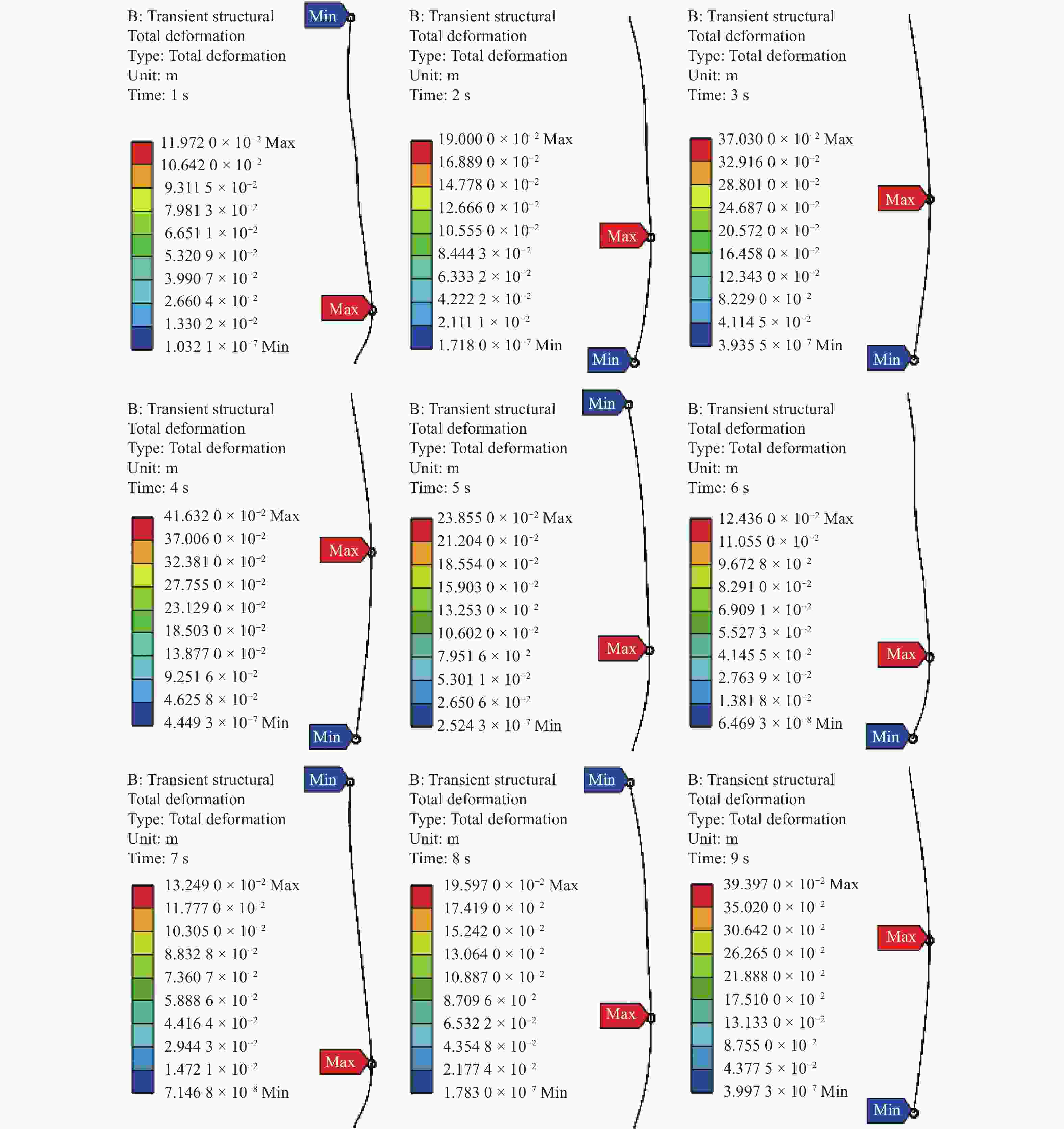
图 10 9 s内系留线缆总形变展示
Figure 10. Demonstration of total deformation of tethered cable in 9 s
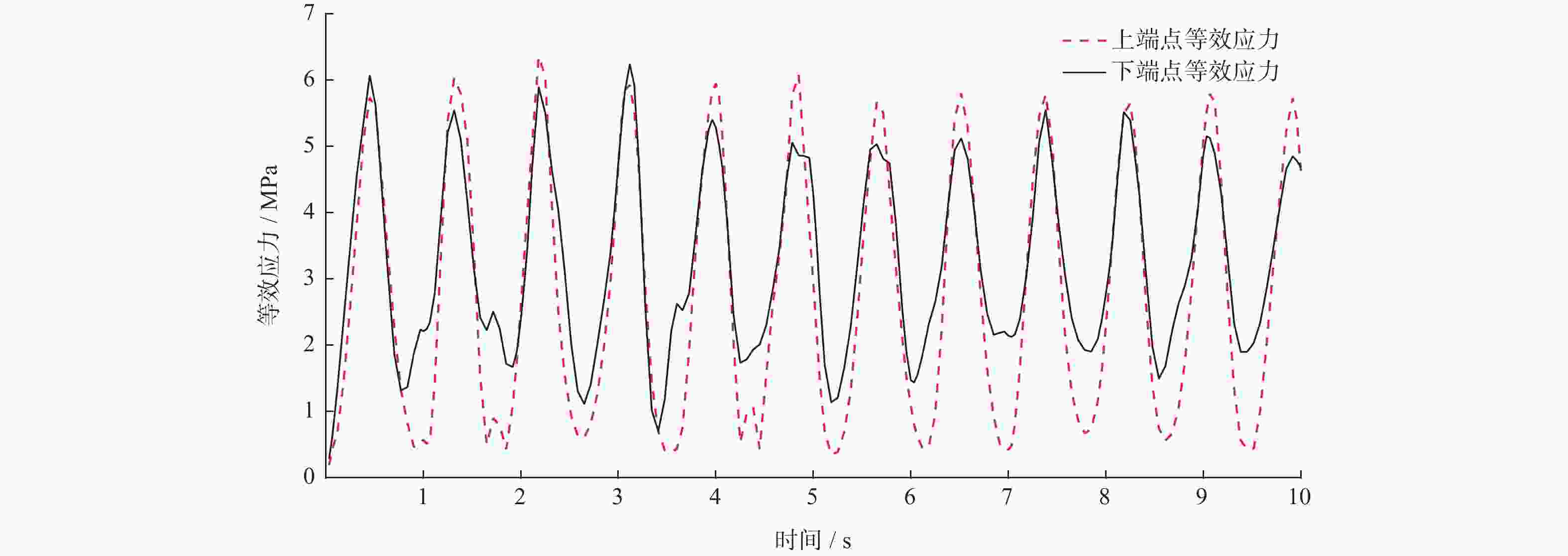
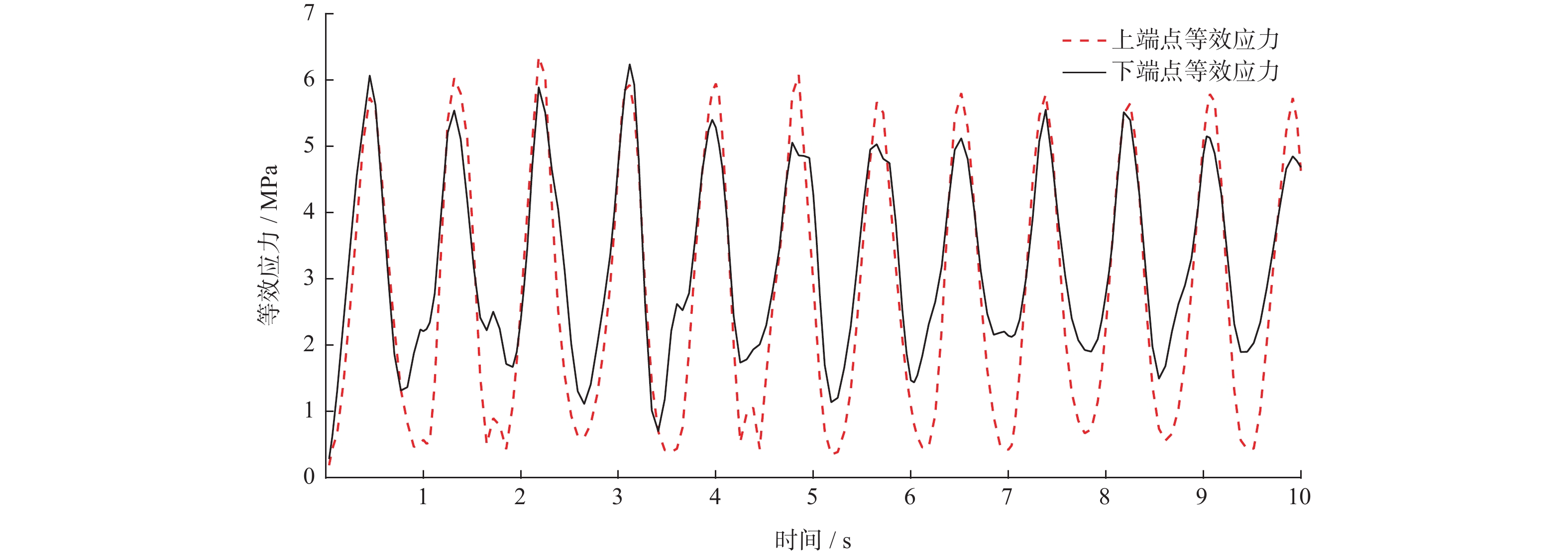
图 12 线缆上下端点的等效应力曲线
Figure 12. Equivalent force curves at upper and lower endpoints of cable
表 1 聚四氟乙烯基本参数
Table 1. PTFE basic parameters
参数名称 数值 弹性模量/ MPa 280 泊松比 0.4 密度/ (g·cm-3) 2.2  下载: 导出CSV
下载: 导出CSV
-
[1] NICOTRA M M, NALDI R, GARONE E. Nonlinear control of a tethered UAV: the taut cable case[J] . Automatica, 2017, 78: 174 − 184. doi: 10.1016/j.automatica.2016.12.018 [2] DICEMBRINI E, SCANAVINO M, DABBENE F, et al. Modelling and simulation of a tethered UAS[C] //Proceedings of 2020 International Conference on Unmanned Aircraft Systems. Athens: IEEE, 2020: 1801 − 1808. [3] 邢龙涛, 刘习军, 张素侠. 系留无人机系统振动特性分析[J] . 应用力学学报, 2021, 38(1): 106 − 112. doi: 10.11776/cjam.38.01.C075 [4] KUMAR R, AGARWAL S R, KUMAR M. Modeling and control of a tethered tilt-rotor quadcopter with atmospheric wind model[J] . IFAC-PapersOnLine, 2021, 54(20): 463 − 468. doi: 10.1016/j.ifacol.2021.11.216 [5] JOSHI V, JAIMAN R K, OLLIVIER-GOOCH C. A variational flexible multibody formulation for partitioned fluid–structure interaction: application to bat-inspired drones and unmanned air-vehicles[J] . Computers & Mathematics with Applications, 2020, 80(12): 2707 − 2737. [6] 刘聪, 魏志强, 韩红蓉, 等. 侧风作用下无人机旋翼悬停状态气动响应分析[J] . 中国安全科学学报, 2021, 31(9): 106 − 112. [7] 翁佳文, 邵伟平, 郝永平, 等. 基于流固耦合的共轴双旋翼气动性分析[J] . 沈阳理工大学学报, 2022, 41(4): 78 − 83. [8] DE CASTRO D F, SANTOS J S, BATISTA M, et al. Modeling and control of tethered unmanned multicopters in hovering flight[C] //Proceedings of the AIAA Modeling and Simulation Technologies Conference. Dallas: AIAA, 2015: 2333. [9] 董军, 叶靓. DDES方法在复杂旋翼流场计算中的应用[J] . 航空学报, 2018, 39(6): 121689. [10] YANG F B, XUE X Y, ZHANG L, et al. Numerical simulation and experimental verification on downwash air flow of six-rotor agricultural unmanned aerial vehicle in hover[J] . International Journal of Agricultural and Biological Engineering, 2017, 10(4): 41 − 53. doi: 10.25165/j.ijabe.20171004.3077 [11] ZHANG S X, TANG Y Q, LIU H X. Snap tension in mooring lines of deepwater platform[J] . China Ocean Engineering, 2009, 23(3): 415 − 428. -

 下载:
下载:

 点击查看大图
点击查看大图
图(12) / 表(1)
计量
- 文章访问数: 422
- HTML全文浏览量: 297
- PDF下载量: 30
- 被引次数: 0
