

Double-layer path planning based on evolutionary ant colony algorithm and conflict prediction resolution
-
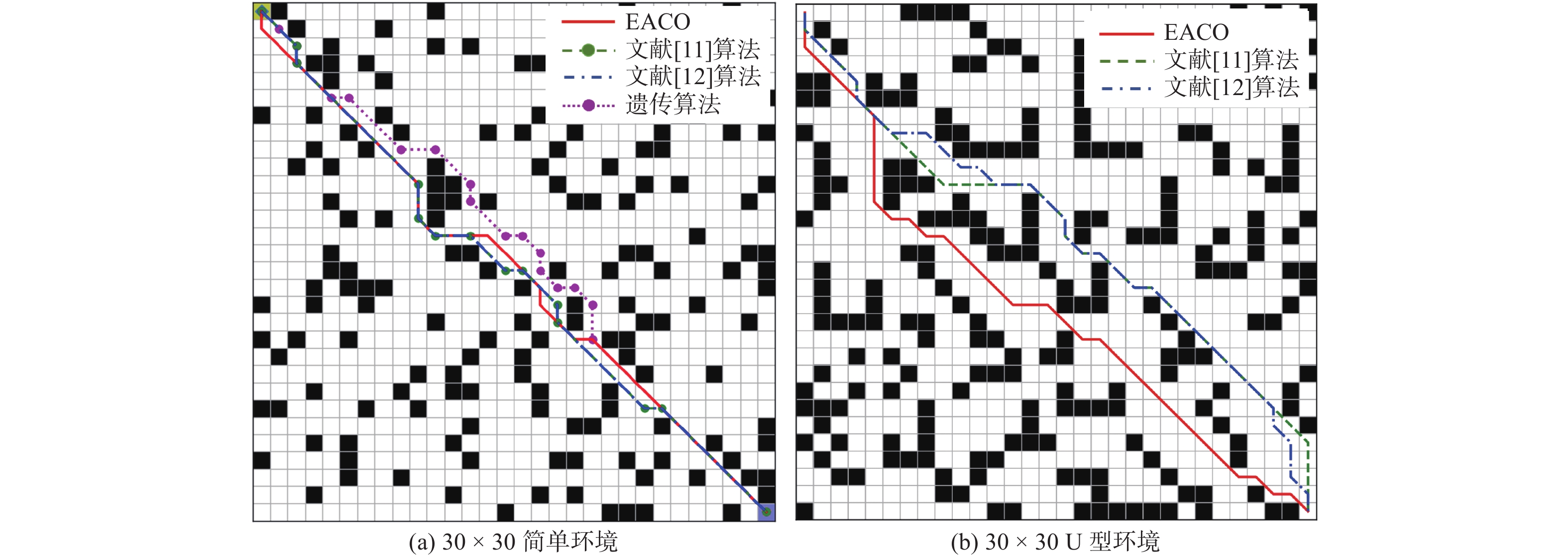
摘要: 针对蚁群算法求解多移动机器人协同路径规划问题时存在的搜索效率较低、路径冲突难以协调等问题,提出一种双层协同路径规划方法。在静态层,将遗传算法的交叉机制融入蚁群算法建立进化路径交叉策略,提高规划路径的质量,同时采用信息素增量差异化计算方式,提高蚁群算法的收敛速度。在动态层,基于三维时空图进行碰撞预测,利用优先无冲突策略有效解决路径的冲突问题。仿真结果表明,提出的双层动态协同路径规划方法能够提高算法的综合性能,解决协同路径规划问题,并验证了算法的可行性和有效性。Abstract: Aiming at the problems of low search efficiency and difficulty in resolving path conflicts when the ant colony algorithm was used to the cooperative path planning problem of multiple mobile robots, a dual-layer cooperative path planning method was proposed. In the static layer, the crossover mechanism of genetic algorithm was integrated into ant colony algorithm, and the evolutionary path crossover strategy was established to improve the quality of planning path.Concurrently, the calculation method of pheromone increment differentiation was adopted to accelerate the convergence speed of ant colony algorithm. In the dynamic layer, collision prediction was conducted based on a three-dimensional space-time map, and a priority conflict-free strategy was employed to effectively resolve path conflict. Simulation results show that the proposed dual-layer dynamic cooperative path planning method can improve the comprehensive performance of the algorithm and solve the cooperative path planning problem, which verifying the feasibility and effectiveness of the proposed algorithm.
-
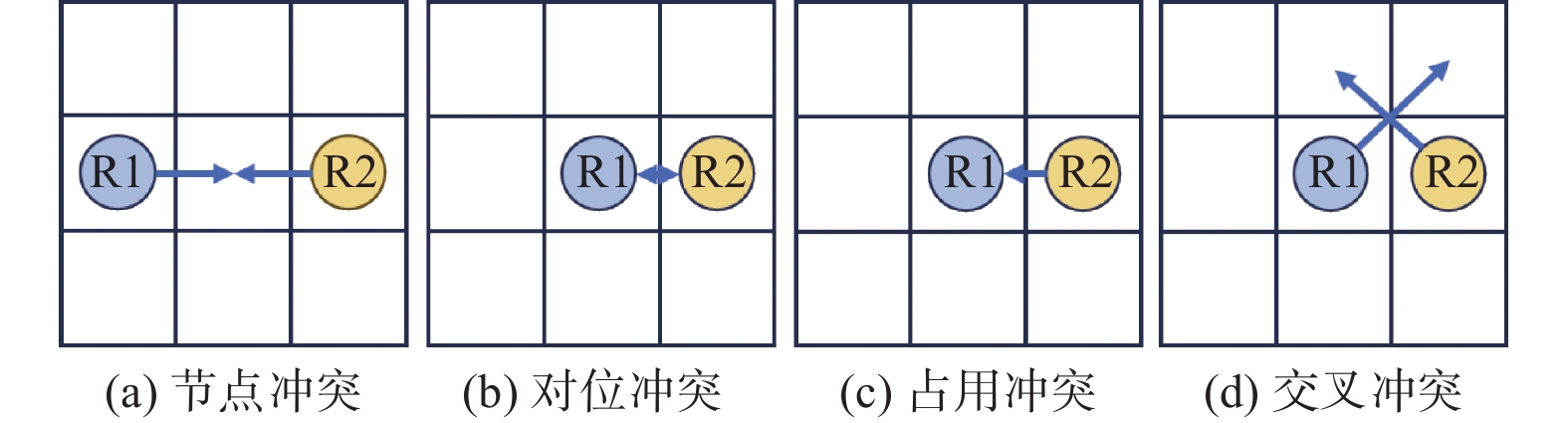
表 1 突消解策略
Table 1. Conflict resolution strategy
冲突类型 冲突消解策略 节点冲突 等待策略/重规划策略 交叉冲突 等待策略/重规划策略 对位冲突 退回策略/重规划策略 占用冲突 退回策略/重规划策略  下载: 导出CSV
下载: 导出CSV
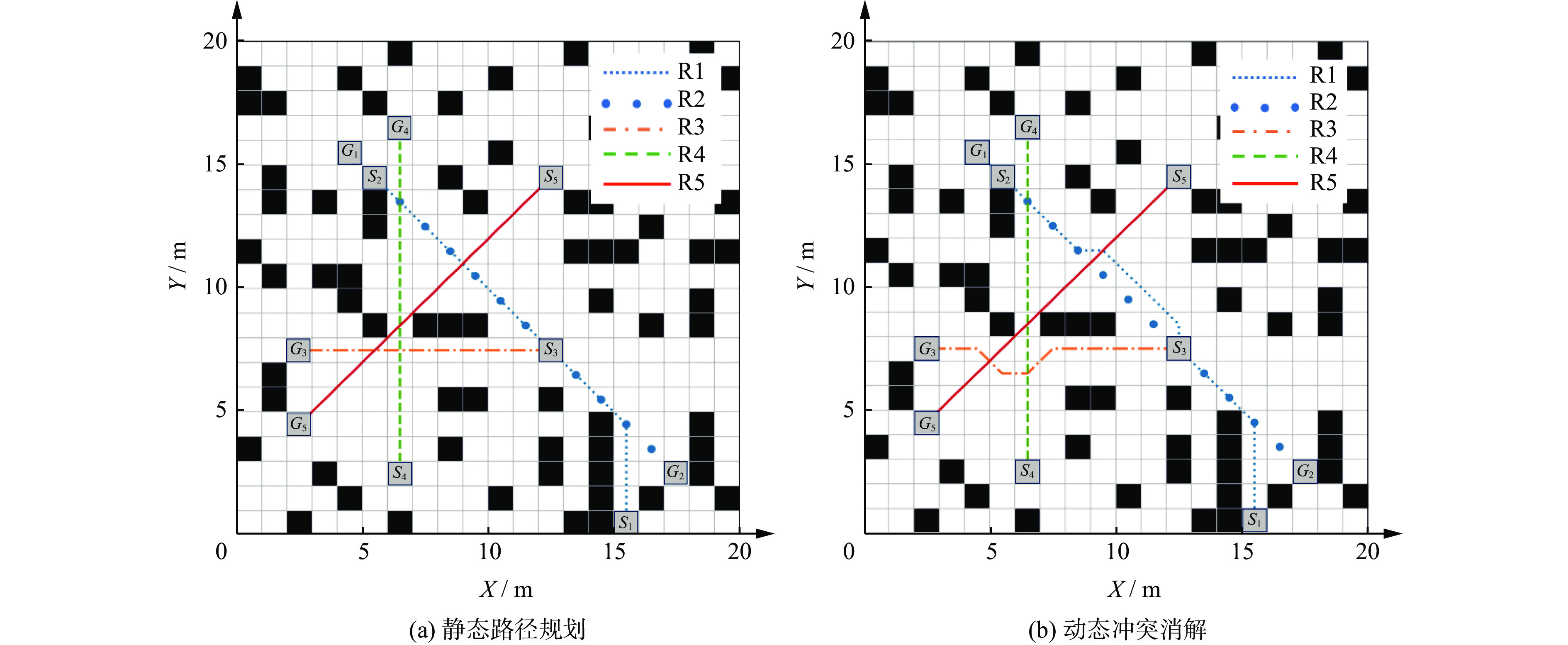
表 3 机器人起点及终点位置
Table 3. Starting point and end point positions of robots
机器人 起点位置 终点位置 优先级 R1 (15.5, 0.5) (4.5, 15.5) 1 R2 (5.5, 14.5) (17.5, 2.5) 2 R3 (12.5, 7.5) (2.5, 7.5) 3 R4 (6.5, 2.5) (6.5, 16.5) 4 R5 (12.5, 14.5) (2.5, 4.5) 5
下载: 导出CSV
-
[1] 臧冀原, 刘宇飞, 王柏村, 等. 面向2035的智能制造技术预见和路线图研究[J] . 机械工程学报, 2022, 58(4): 285 − 308. [2] 刘志飞, 曹雷, 赖俊, 等. 多智能体路径规划综述[J] . 计算机工程与应用, 2022, 58(20): 43 − 62. doi: 10.3778/j.issn.1002-8331.2203-0467 [3] 张迎雪, 陈萌, 陈金宝, 等. 多机器人智能化协同技术研究进展[J] . 载人航天, 2021, 27(6): 767 − 778. doi: 10.3969/j.issn.1674-5825.2021.06.014 [4] 马滕, 茅健. 改进多步长蚁群算法移动机器人路径规划研究[J] . 上海工程技术大学学报, 2023, 37(3): 255 − 262. doi: 10.12299/jsues.22-0174 [5] MIAO C W, CHEN G Z, YAN C L, et al. Path planning optimization of indoor mobile robot based on adaptive ant colony algorithm[J] . Computers & Industrial Engineering, 2021, 156: 107230. [6] 徐劲力, 柳佳, 司马立萱. 多因素A*蚁群算法的机器人路径规划[J] . 组合机床与自动化加工技术, 2022(8): 21 − 25. [7] 李健, 孙晓海, 廖昌义, 等. 基于双起点蚁群算法的机器人路径规划新方法[J/OL] . 吉林大学学报(工学版), 1 − 7[2024-04-15] . https://doi.org/10.13229/j.cnki.jdxbgxb.20230339. [8] 汪繁荣, 杜力, 徐光辉. 基于改进蚁群算法的分布式多机器人协同路径规划[J] . 中南民族大学学报(自然科学版), 2023, 42(5): 650 − 657. [9] 李志敏. 基于三维时空状态图−并行排序蚁群算法的多机器人路径协同规划[J] . 现代制造工程, 2021(12): 41 − 47. [10] LI P, YANG L W. Conflict-free and energy-efficient path planning for multi-robots based on priority free ant colony optimization[J] . Mathematical Biosciences and Engineering, 2023, 20(2): 3528 − 3565. [11] 张恒, 何丽, 袁亮, 等. 基于改进双层蚁群算法的移动机器人路径规划[J] . 控制与决策, 2022, 37(2): 303 − 313. [12] 刘加奇, 王泰华, 董征. 基于改进蚁群算法的移动机器人路径规划[J] . 传感器与微系统, 2022, 41(5): 140 − 143. -

 下载:
下载:

 点击查看大图
点击查看大图
图(7) / 表(3)
计量
- 文章访问数: 437
- HTML全文浏览量: 304
- PDF下载量: 20
- 被引次数: 0
