

Research on transmission backlash characteristics of end-effector in minimally invasive surgical robots
-
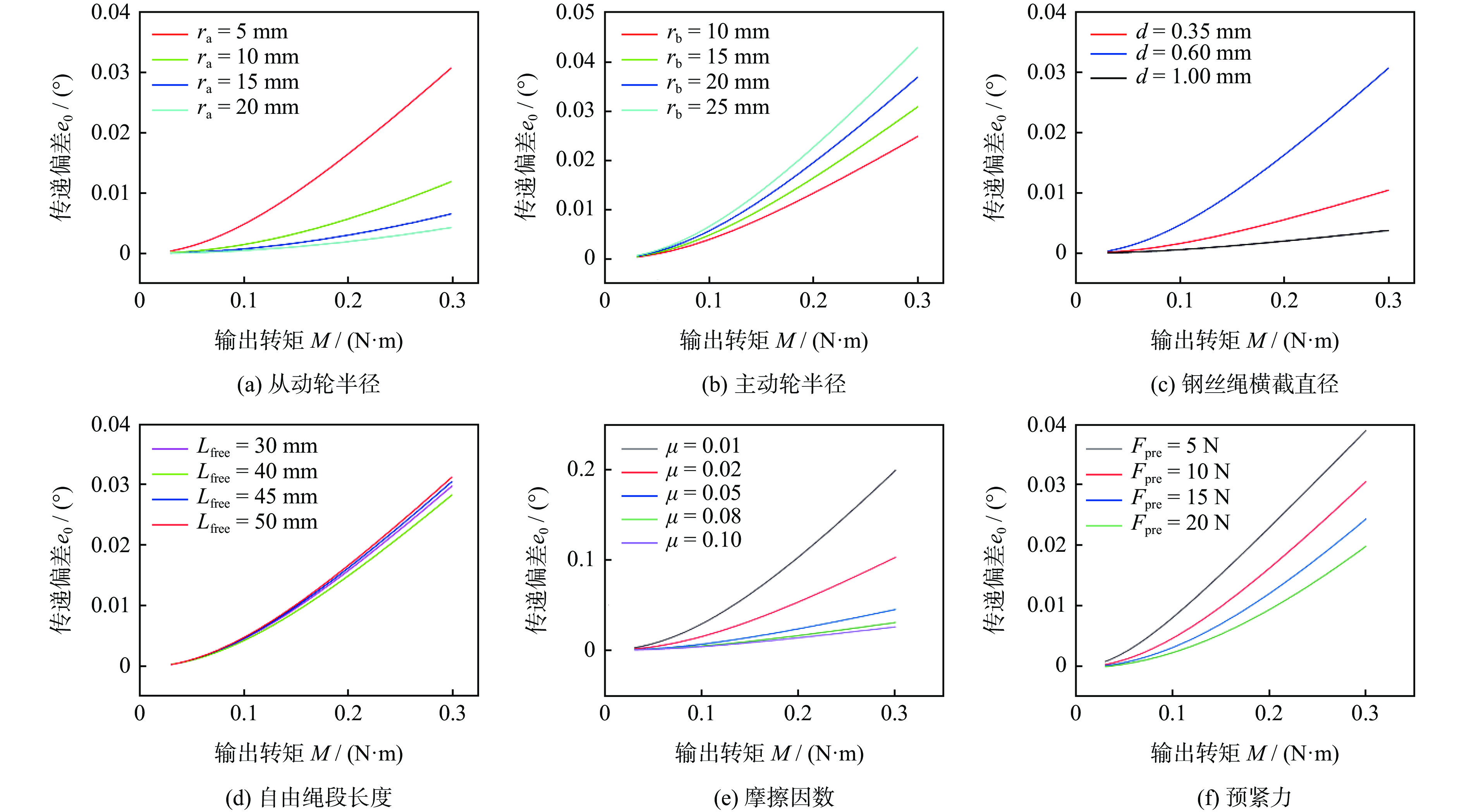
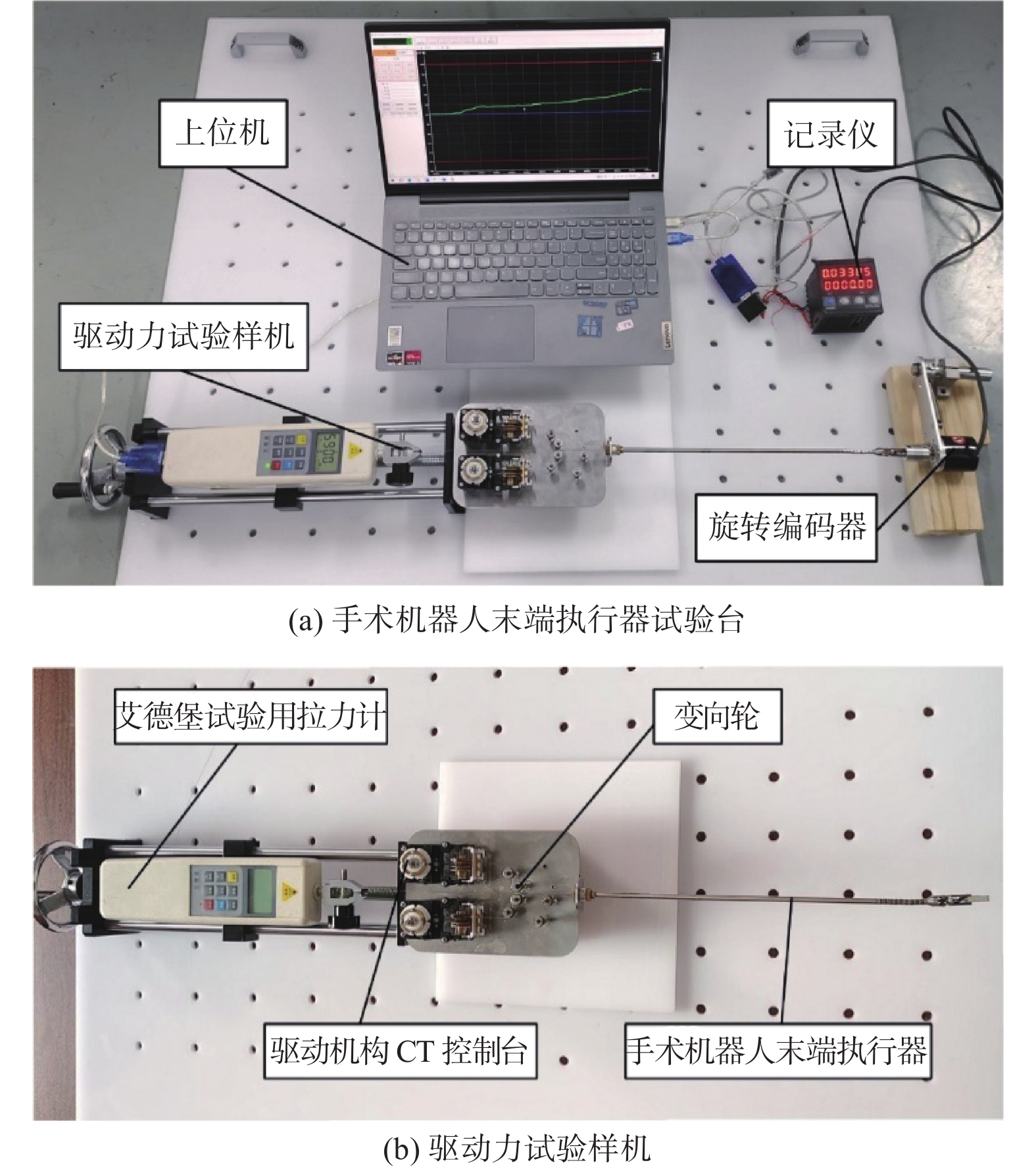
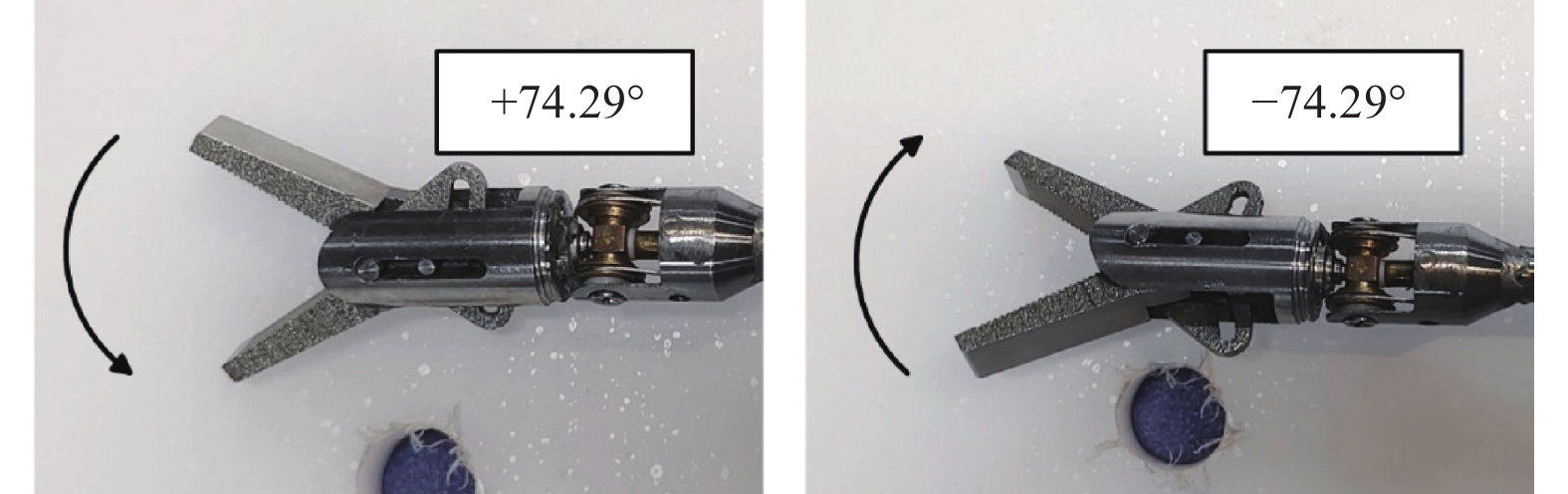
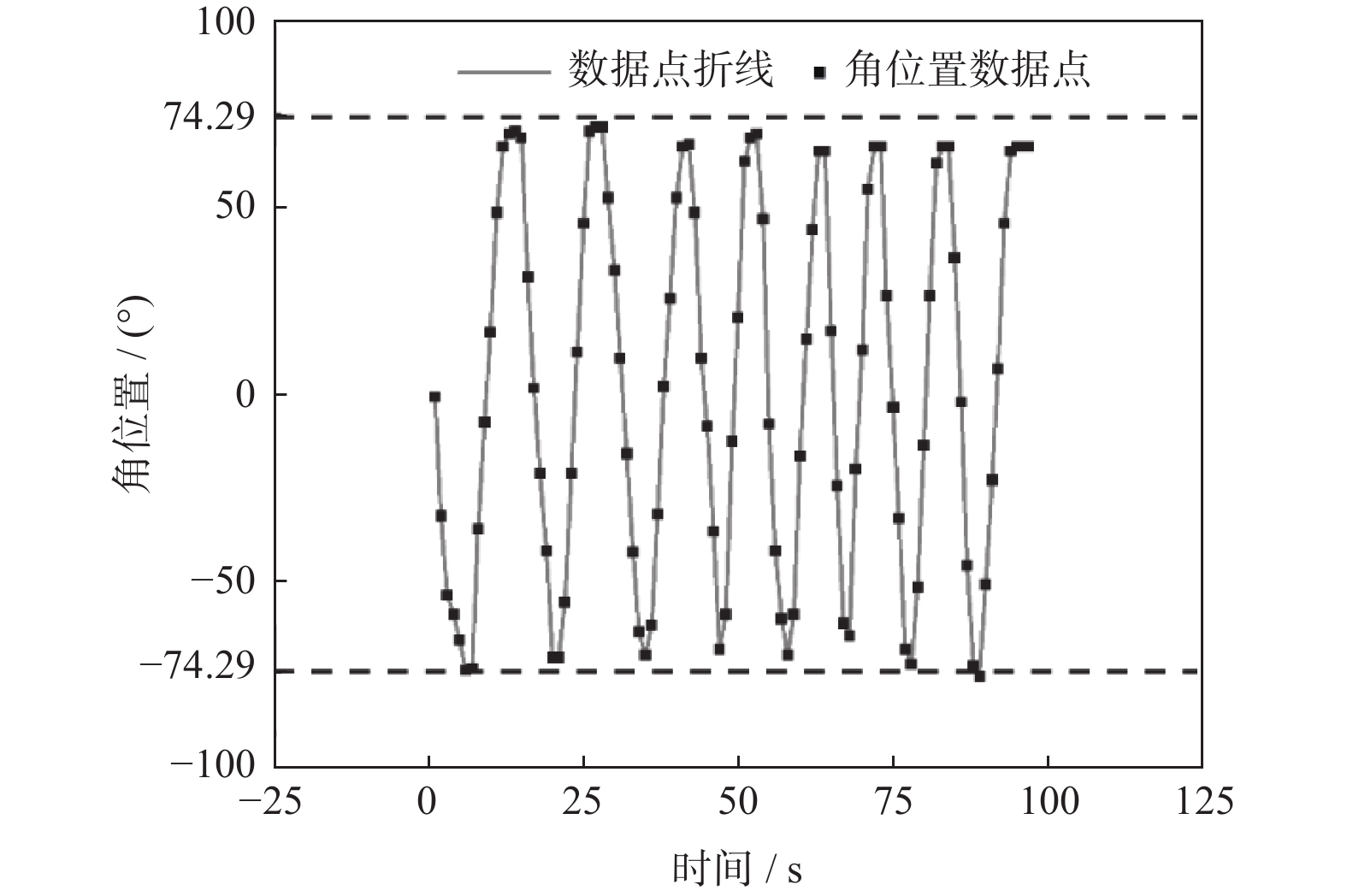
摘要: 以一种微创手术机器人末端执行器为研究对象,提出一种新型旋转机构,并针对末端传动空回特性开展数值模拟与试验研究。通过理论推导建立传动空回计算模型,分析不同影响因素下传递偏差对输出转矩的影响。数值分析结果表明,当输出转矩为0 ~ 0.3 N·m时,传递偏差为0° ~ 0.04°。传动空回特性受预紧力和钢丝绳横截面积影响显著,受自由绳段长度影响较小。最后,制作实物模型并搭建试验平台进行跟踪试验,测得末端执行器旋转阈值为 ± 74.29°。模拟多次手术方向变换操作,对传动空回特性进行数据与误差分析。Abstract: Focusing on the end-effector of minimally invasive surgical robots, proposing a novel rotation mechanism and conducting numerical simulation and experimental research on its transmission backlash characteristics. A computational model for transmission backlash was established through theoretical derivation, with analysis of transfer deviation's impact on output torque under different influencing factors. Numerical results indicate that when output torque ranges from 0 to 0.3 N·m, the transfer deviation stays within 0° to 0.04°. Transmission backlash shows significant sensitivity to preload force and steel wire cross-sectional area, while being less affected by free wire segment length. A physical prototype and experimental platform were constructed to perform tracking experiments, measuring the end-effector's rotation angle threshold at ±74.29°. Data and error analyses of transmission backlash characteristics were conducted through simulations mimicking frequent surgical direction changes during operations.
-
Key words:
- surgical robot /
- end-effector /
- transmission backflash /
- simulation experiment
-
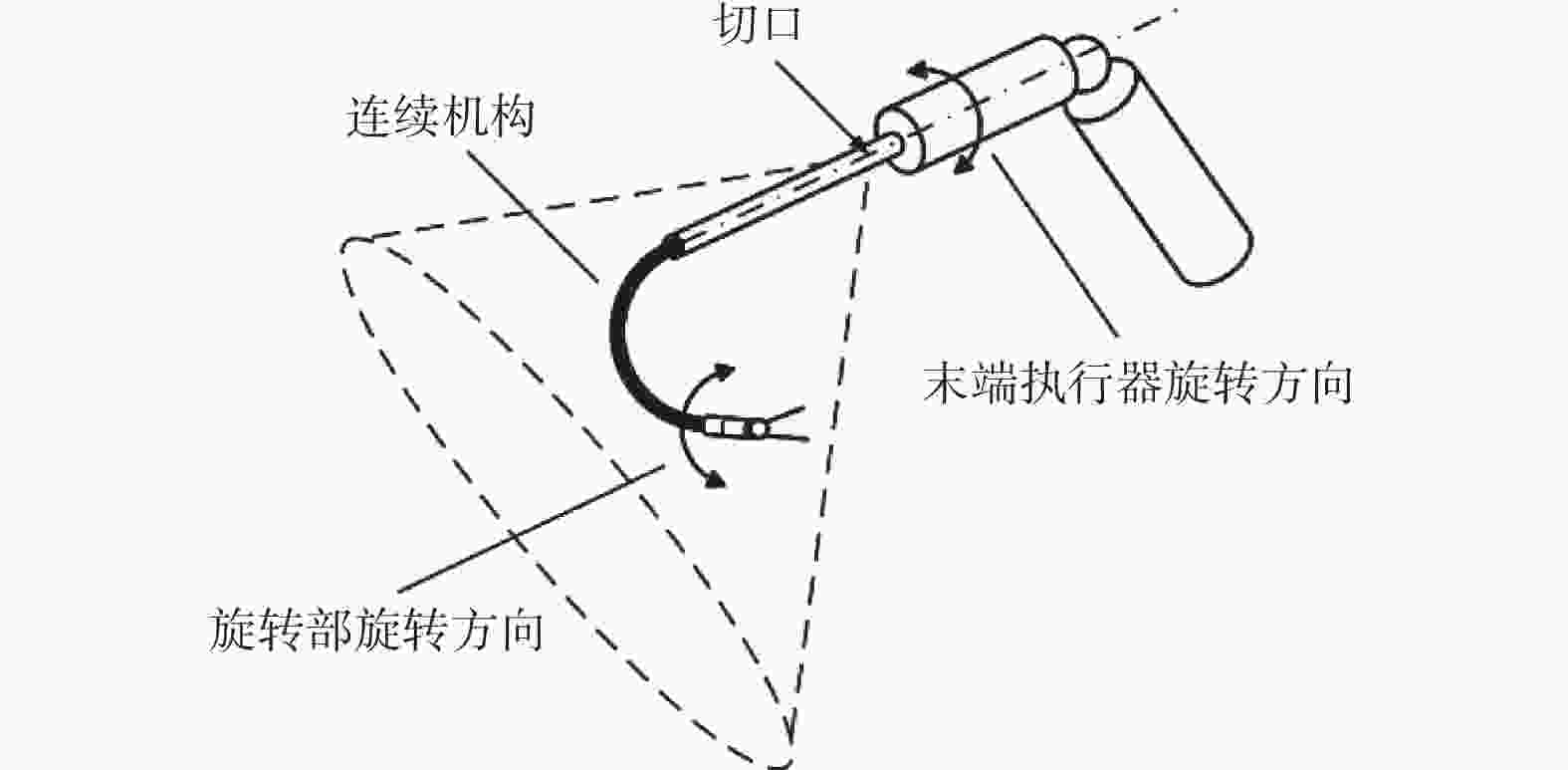
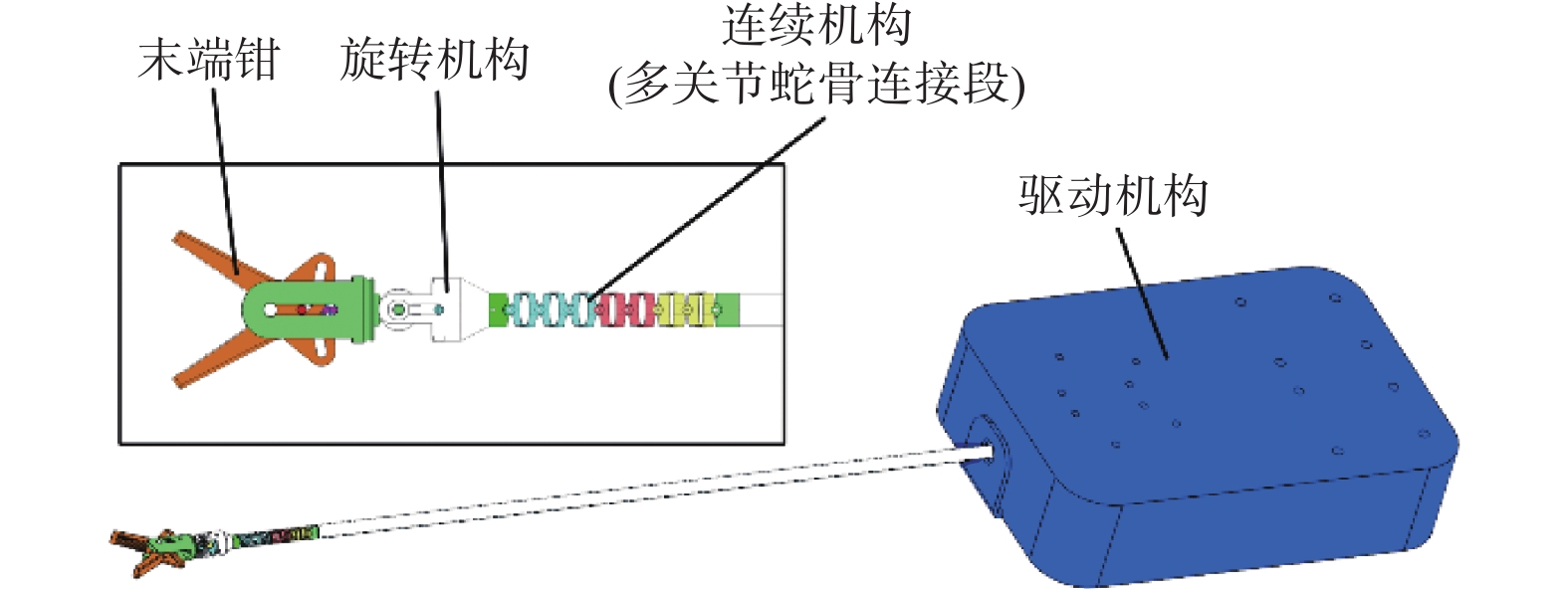
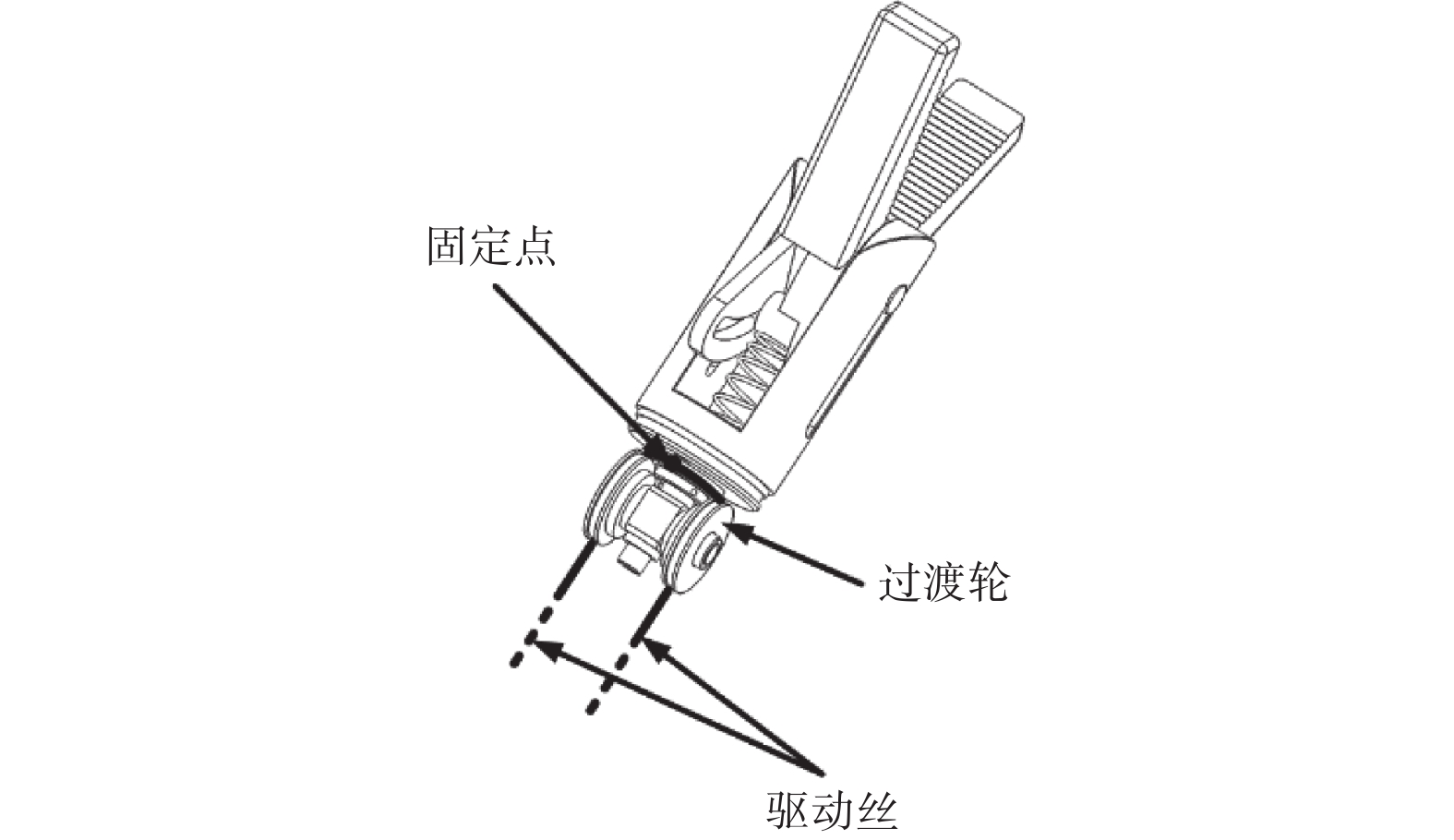
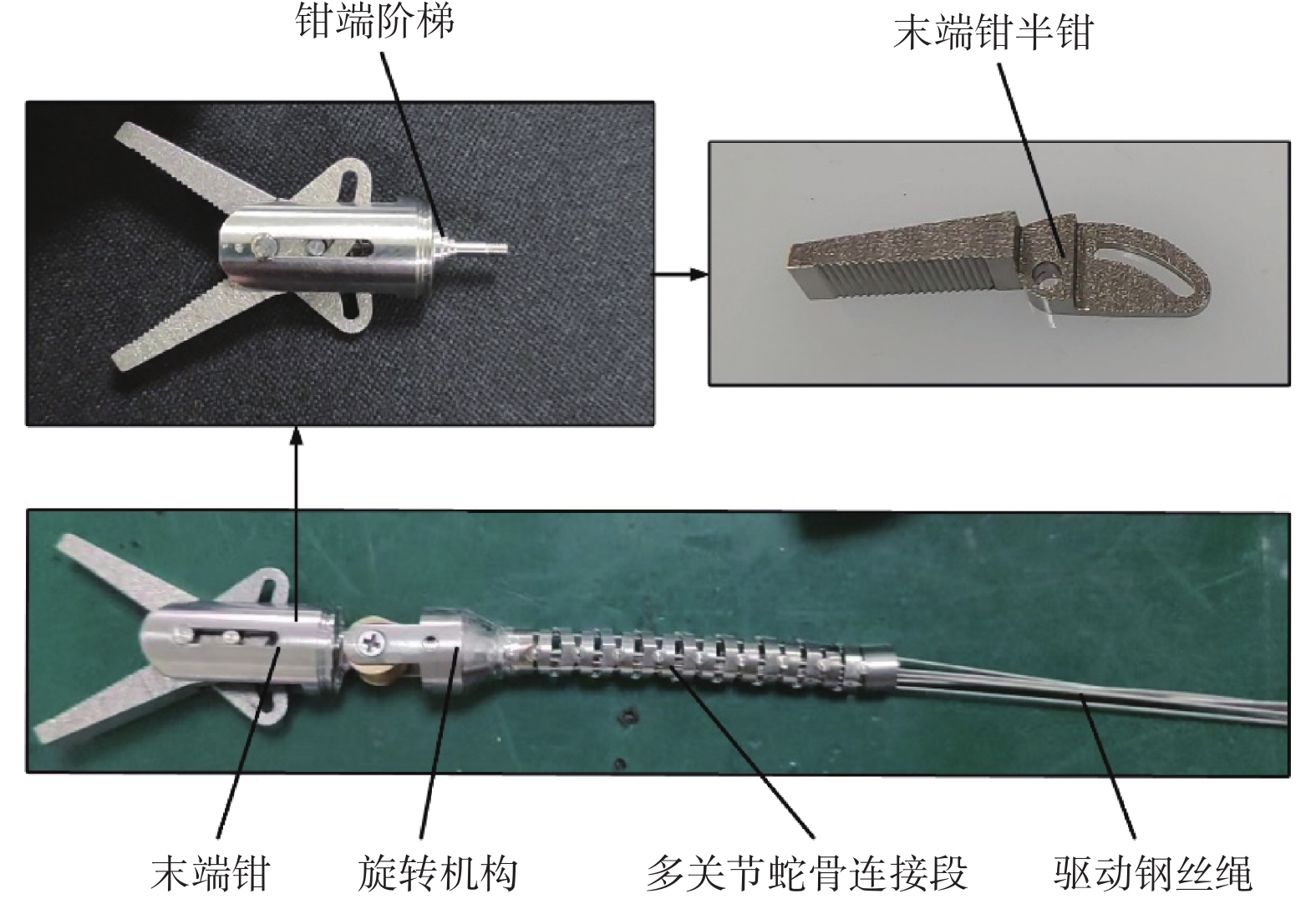
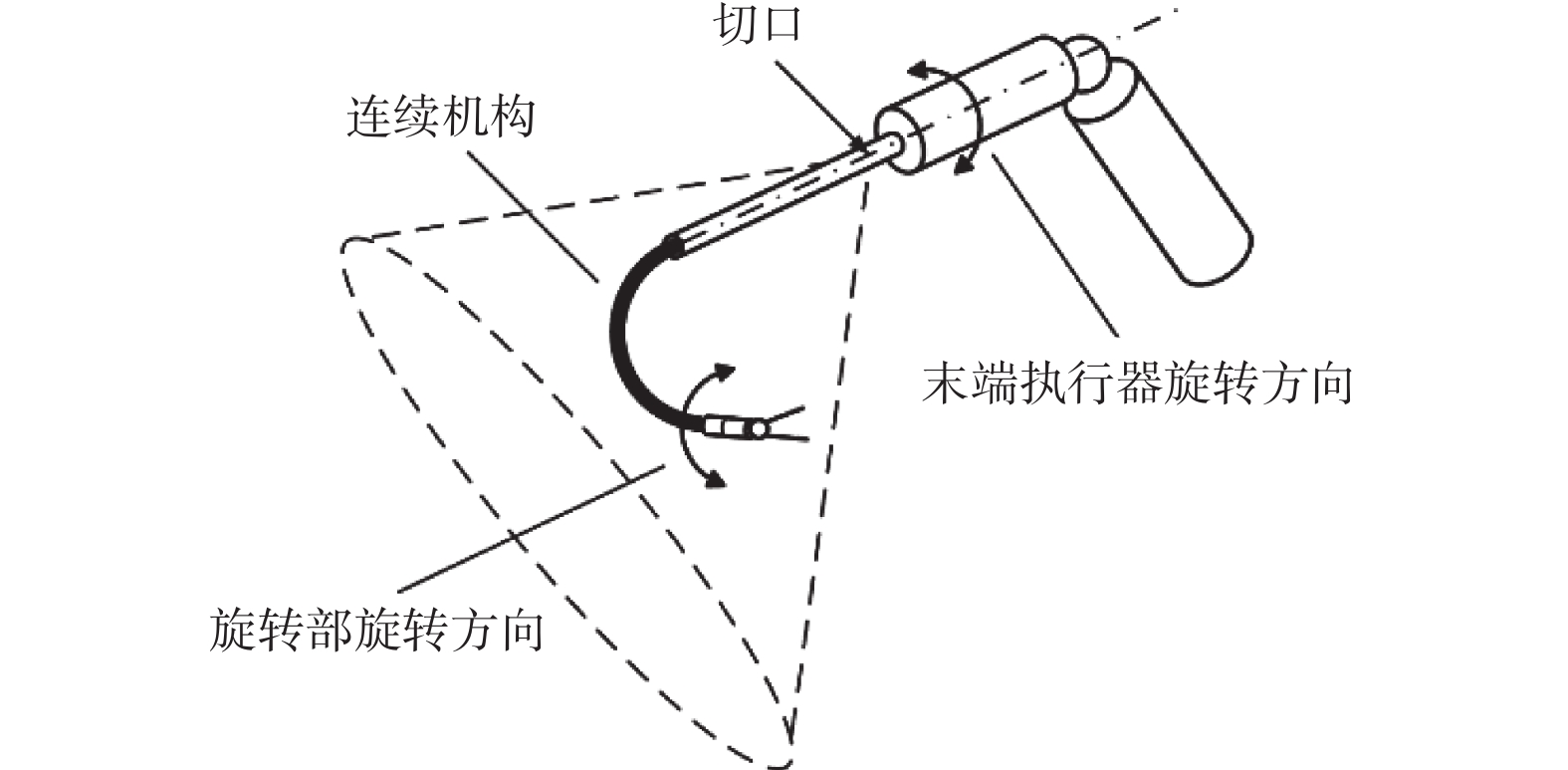
图 1 手术机器人末端旋转新机构
Figure 1. A novel end-effector rotating mechanism for surgical robots
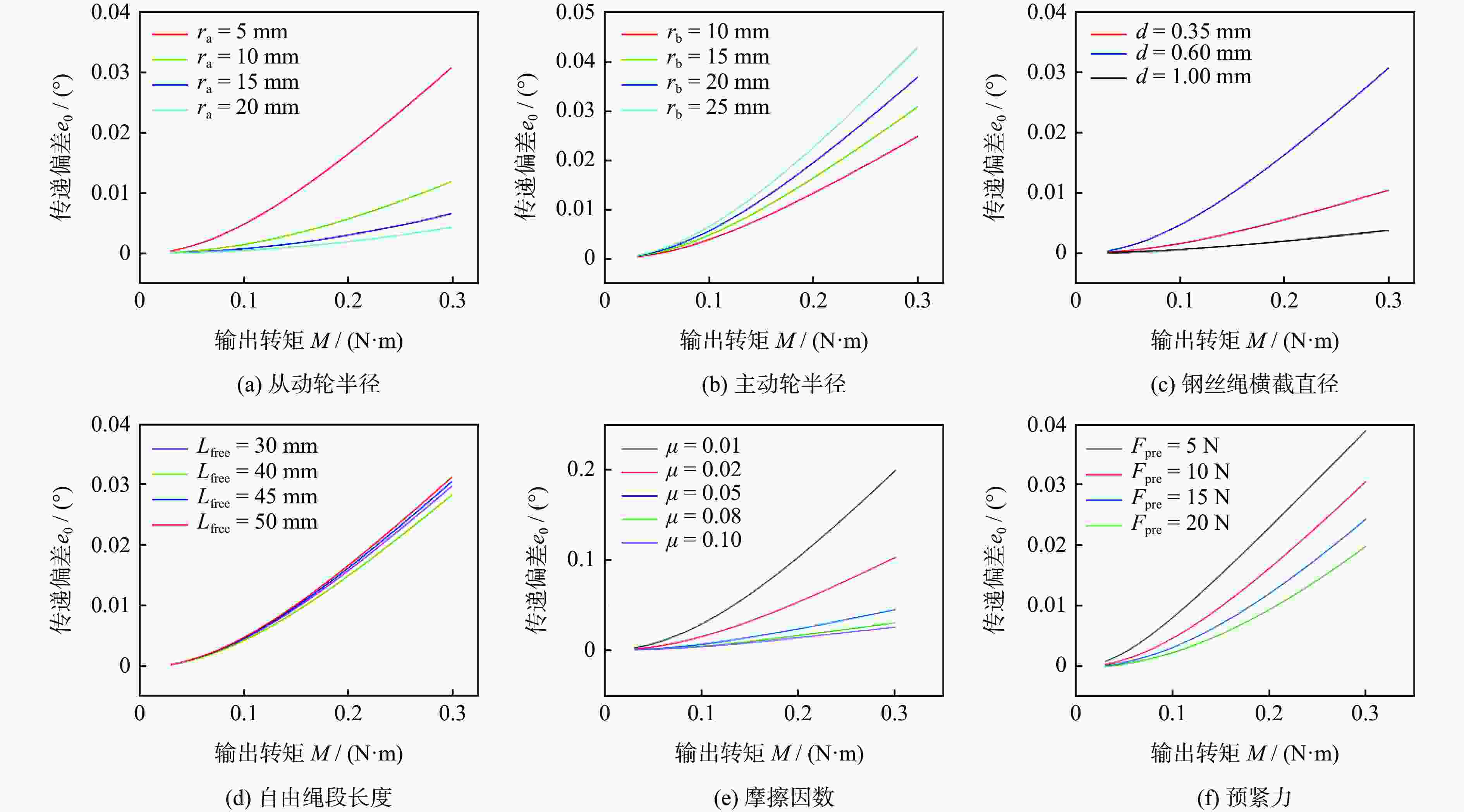
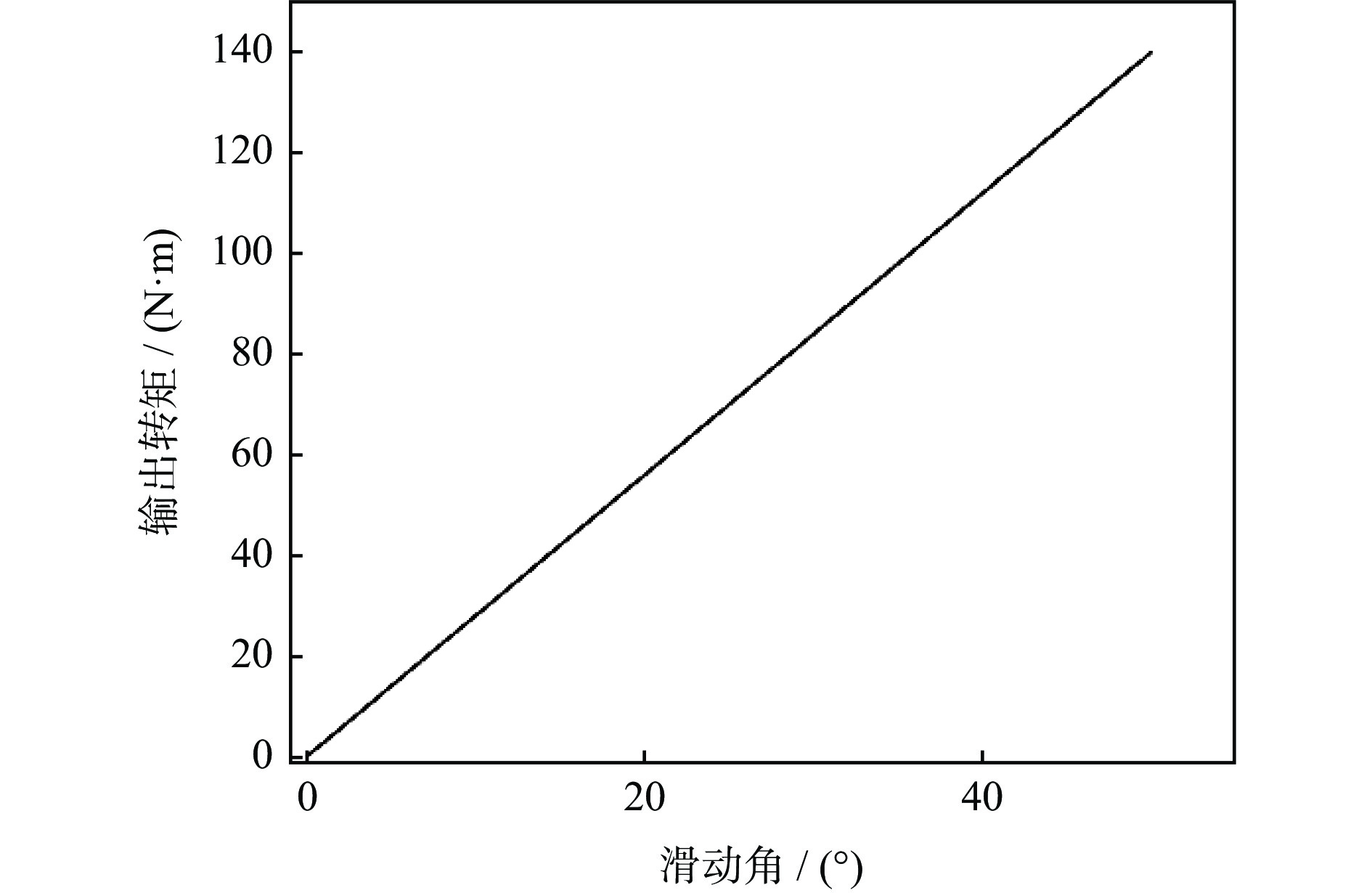
图 7 不同影响因素下输出转矩与传递偏差的关系
Figure 7. Relationship between output torque and transmission deviation under different influencing factors
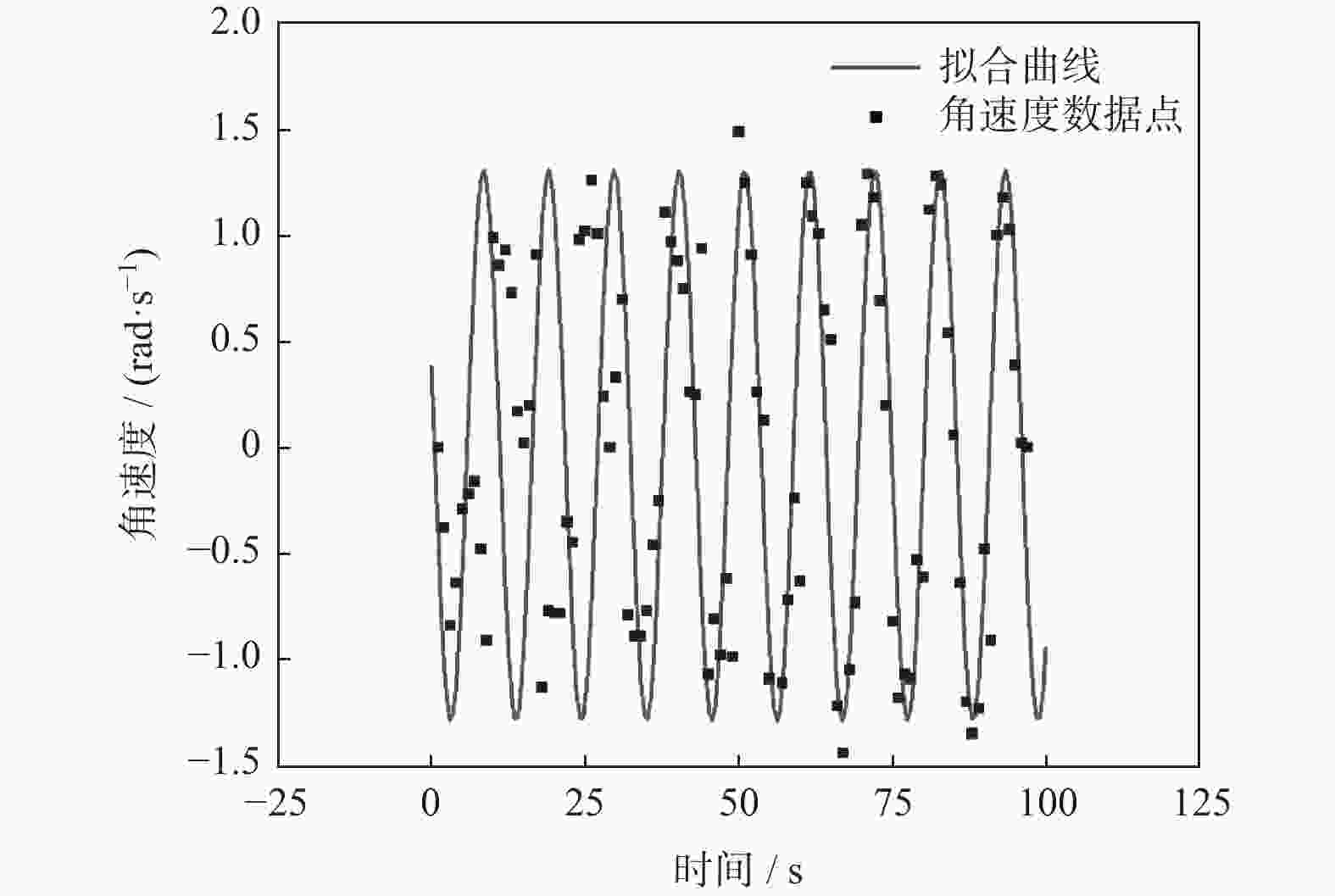
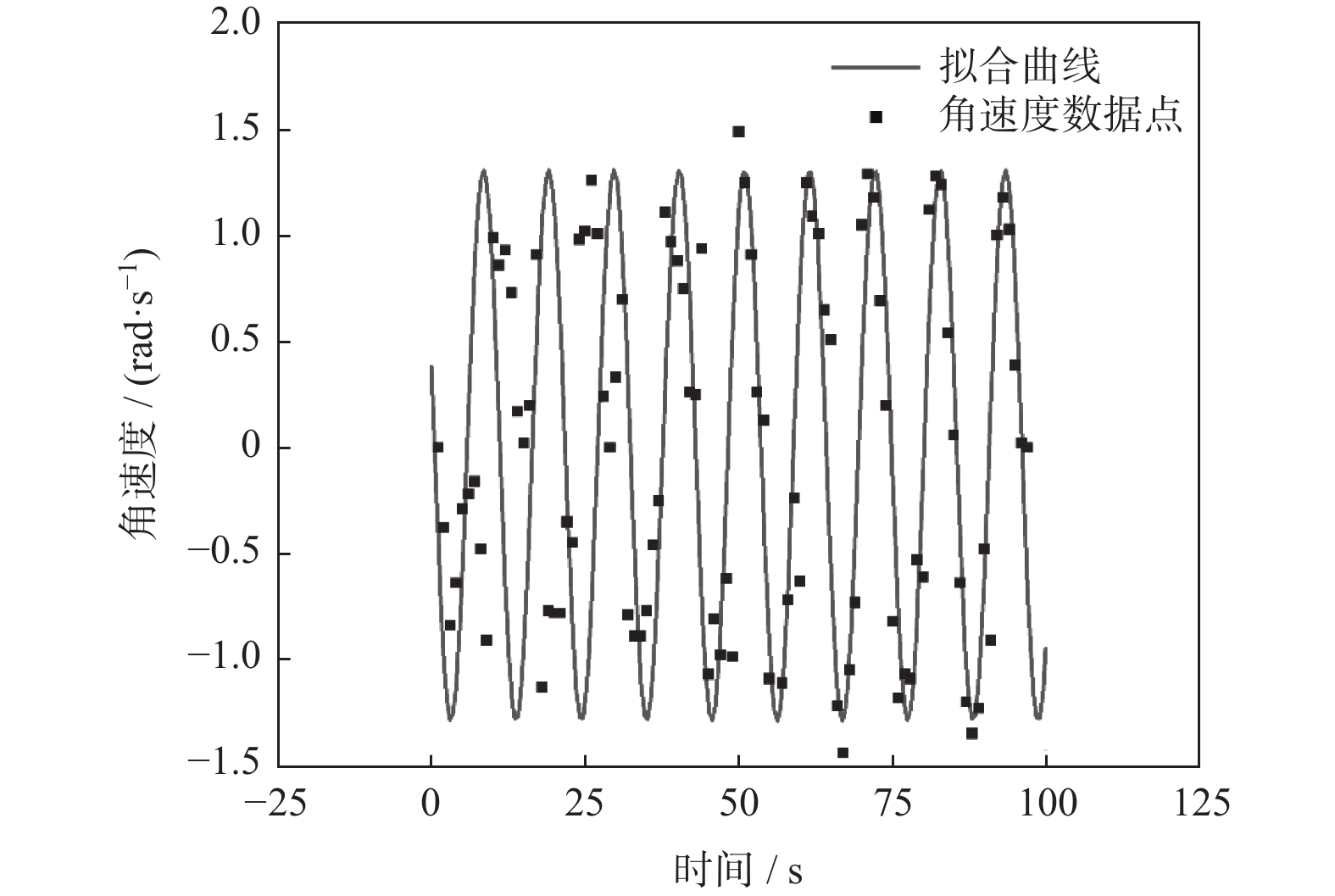
图 11 旋转机构输出角速度及拟合曲线
Figure 11. Rotating component output angular velocity and fitting curve
表 1 旋转部模拟试验参数
Table 1. Rotating component simulation experiment parameter
符号 参数 数值 ra 从动轮半径/mm 5 rb 主动轮半径/mm 15 Lfree 自由绳段长度/mm 45 A 钢丝绳横截面积/mm2 0.096 162 5e-6 E 钢丝绳弹性模量/GPa 200  下载: 导出CSV
下载: 导出CSV
表 2 末端执行器旋转角度
Table 2. End-effector rotating component rotation angles
角位移/mm 角度/(°) 角位移/mm 角度/(°) 13.00 148.97 13.10 150.11 13.00 148.97 13.00 148.97 12.55 143.81 13.25 151.83 12.60 144.39 13.05 149.54 12.80 146.68 13.00 148.97 12.35 141.52 13.50 154.70 13.60 155.84 12.75 146.10 12.95 148.40 12.97(平均值) 148.59(平均值)
下载: 导出CSV
-
[1] 王家寅, 姜乃晶, 赵亚平, 等. 一种新型单臂单孔微创腹腔镜手术机器人系统[J] . 中国医疗器械杂志, 2023, 47(1): 13 − 18,25. doi: 10.3969/j.issn.1671-7104.2023.01.002 [2] 丛戎, 邵云强, 田金勇, 等. 国产手术机器人辅助单孔腹腔镜技术在泌尿外科的初步应用[J] . 机器人外科学杂志(中英文), 2023, 4(6): 533 − 539. [3] 谢京茂, 易波. 不同类型手术机器人全直肠系膜切除术短期疗效的比较[J] . 中国临床医学, 2022, 29(4): 627 − 632. doi: 10.12025/j.issn.1008-6358.2022.20212504 [4] 张雪, 张帆. 内窥镜手术机器人的轻量化设计与分析[J] . 组合机床与自动化加工技术, 2018(4): 54 − 56,69. [5] HONG M B, JO Y H. Prototype design of robotic surgical instrument for minimally invasive robot surgery[C] //Proceedings of the 7th Asian Conference on Computer Aided Surgery. Bangkok: Springer, 2012: 20 − 28. [6] CHOI D, KIM C, SONG J B. Development of microsurgical robot arm using spherical serial RCM mechanism and commercial laparoscopic surgical robot instrument[C] //Proceedings of the 19th International Conference on Ubiquitous Robots (UR). Jeju: IEEE, 2022: 159 − 164. [7] 唐禹. 微创手术机器人末端操作臂设计与丝传动特性研究[D] . 南宁: 广西大学, 2023. [8] 谢馨. 精密柔索传动特性分析与设计问题研究[D] . 长沙: 国防科技大学, 2019. [9] 鲁亚飞. 精密柔索传动机理与设计方法研究[D] . 长沙: 国防科学技术大学, 2013. [10] 尹强. 水下作业柔性臂机械系统的研发与试验[D] . 绵阳: 西南科技大学, 2022. [11] BASER O, ILHAN KONUKSEVEN E. Theoretical and experimental determination of capstan drive slip error[J] . Mechanism and Machine Theory, 2010, 45(6): 815 − 827. doi: 10.1016/j.mechmachtheory.2009.10.013 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 281
- HTML全文浏览量: 293
- PDF下载量: 25
- 被引次数: 0
