

Development of adaptive front-light system based on rapid control prototype
-
摘要: 针对传统车灯系统开发效率低、迭代周期长、实车仿真成本高,且无法满足现代汽车智能化需求等问题,基于前照灯自适应控制逻辑,提出前照灯照明角度偏转计算公式,构建自适应前照灯系统(adaptive front-lighting system, AFS)模型。利用基于dSPACE的快速控制原型(rapid control prototype, RCP)技术,将AFS模型快速转化为可运行的实时系统,模拟多种复杂驾驶场景验证AFS控制逻辑和照明角度偏转的准确性和合理性。应用结果表明,此开发方法缩短了系统开发周期,提高了开发效率,所提出的AFS显著提高了驾驶的安全性和舒适性。Abstract: Traditional vehicle lighting control system are characterized by low development efficiency, long iteration cycles, high costs of real-vehicle simulation, and an inability to meet the intelligent demands of modern automobiles. To address these issues, a calculation formula for the deflection of the headlamp's illumination angle was proposed based on the adaptive control logic of the headlamps, and a model of the adaptive front-lighting system (AFS) was constructed. Then, the AFS model was rapidly transformed intoan executable real-time system by utilizing the dSPACE-based rapid control prototyping (RCP) technology. Various complex driving scenarios were simulated to verify the accuracy and validity of the AFS control logic and the deflection of the illumination angle. The application results indicate that this development method shortens the system development cycle and improve development efficiency, and that the proposed AFS significantly enhances driving safety and comfort.
-
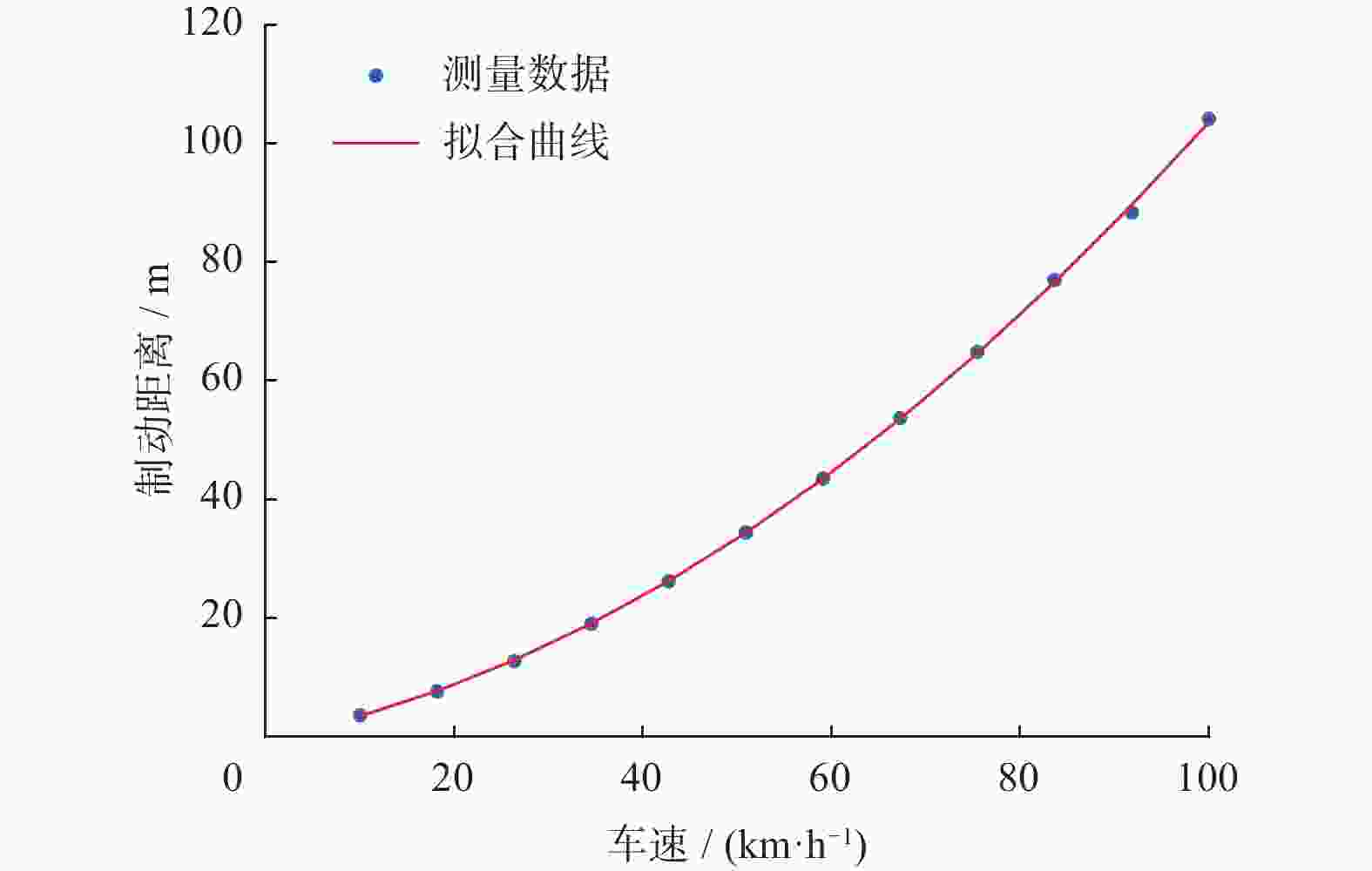
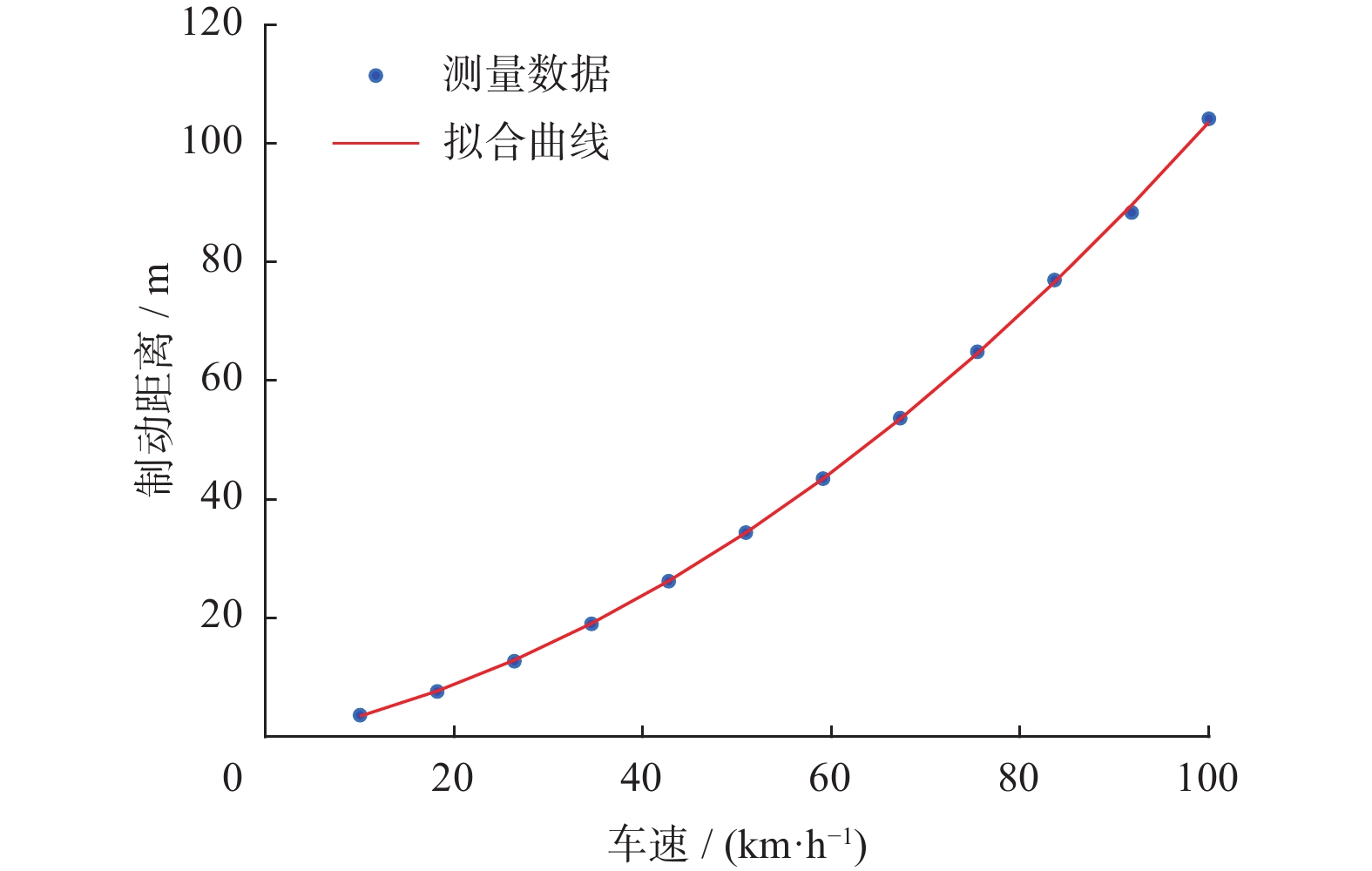
图 6 车速与制动距离二次拟合图
Figure 6. Quadratic fitting diagram of vehicle speed and braking distance
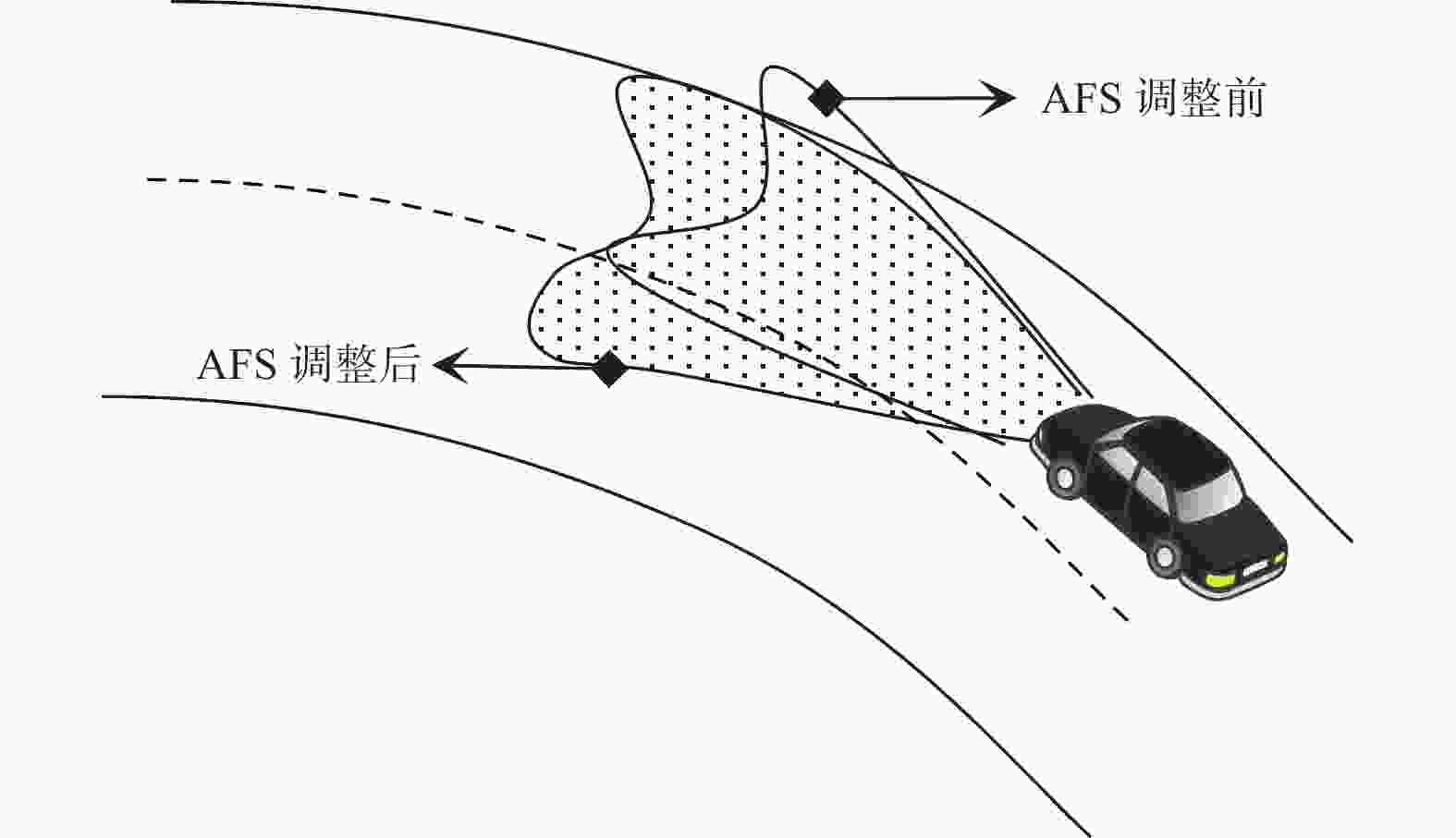
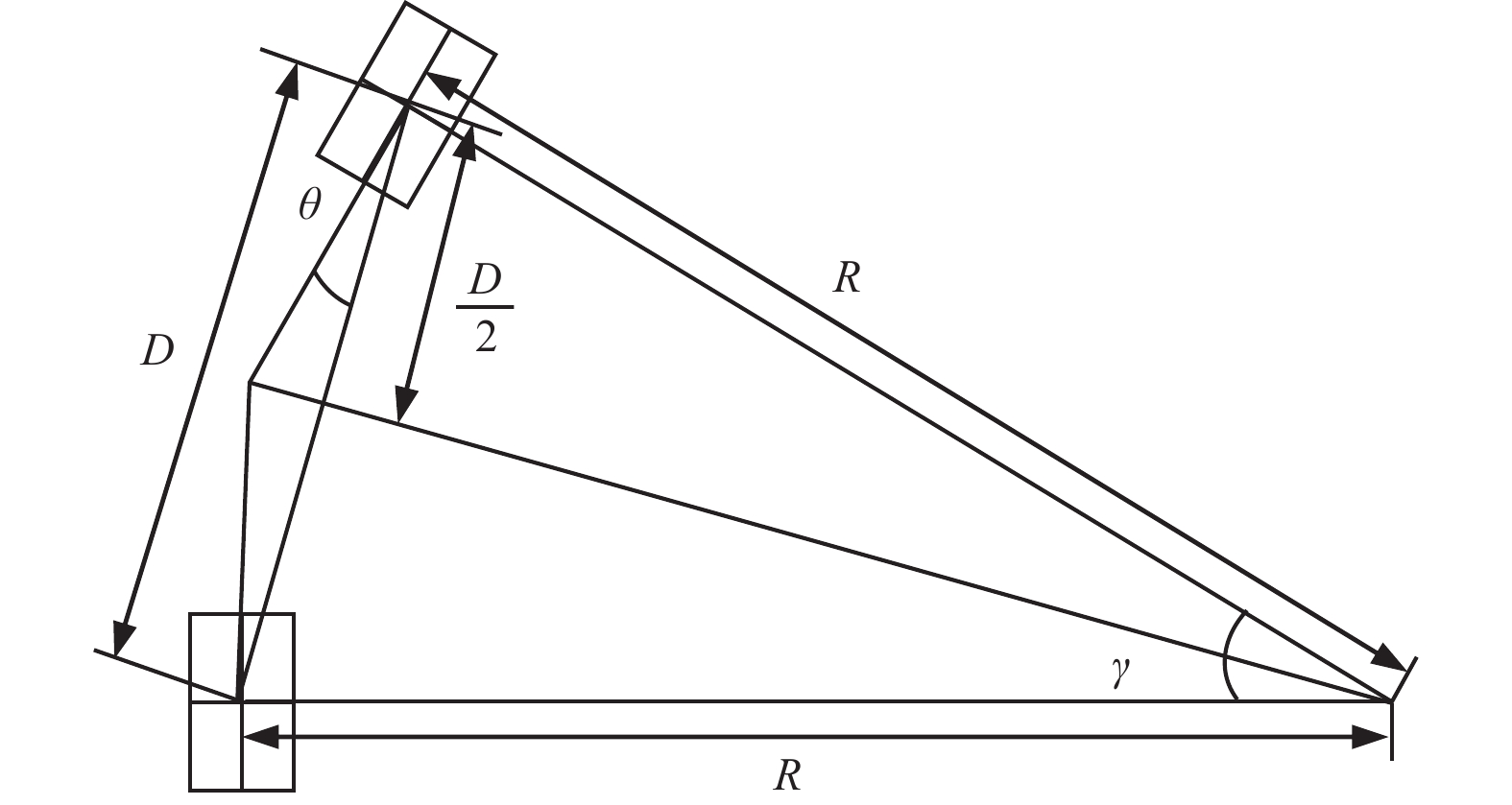
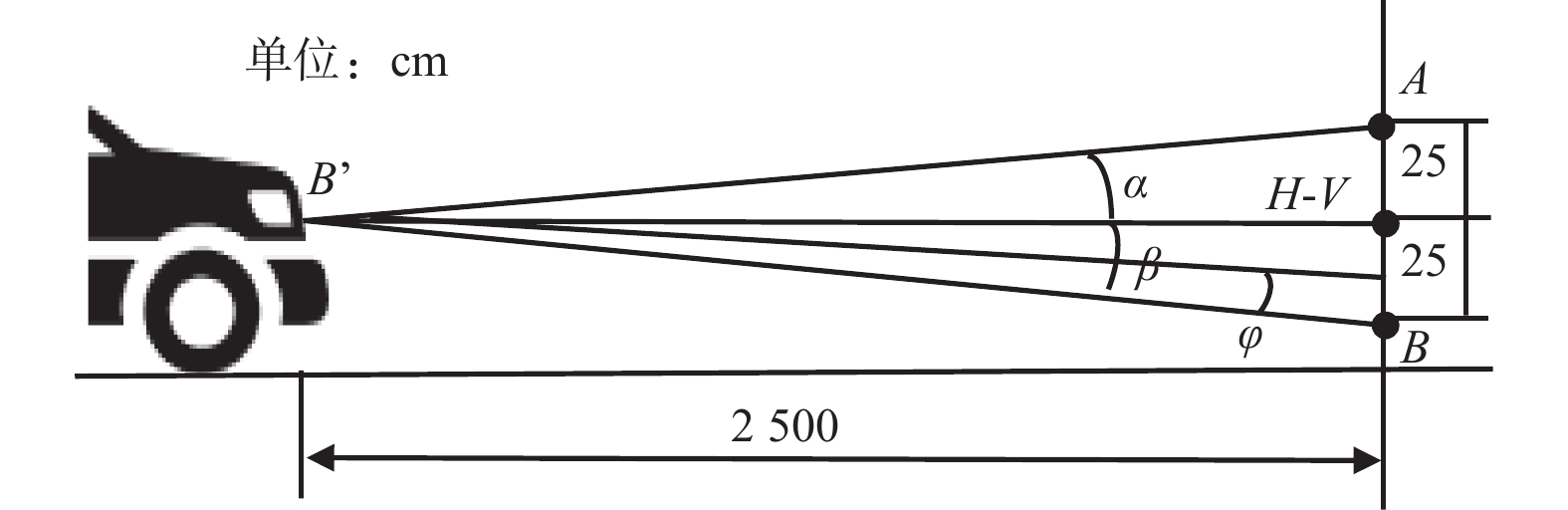
图 8 AFS系统水平角度调整示意图
Figure 8. Schematic diagram of horizontal angle adjustment of AFS system
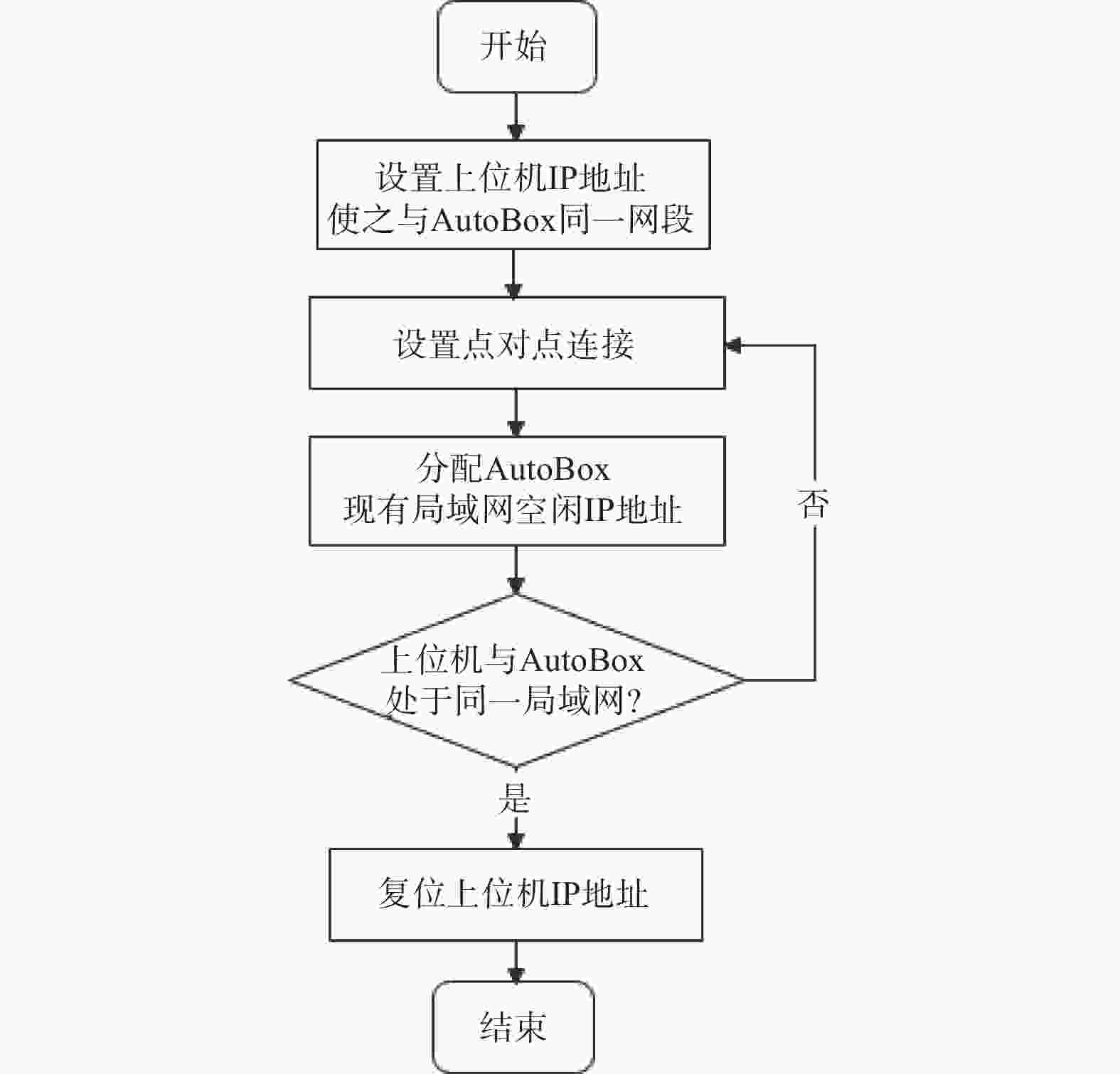
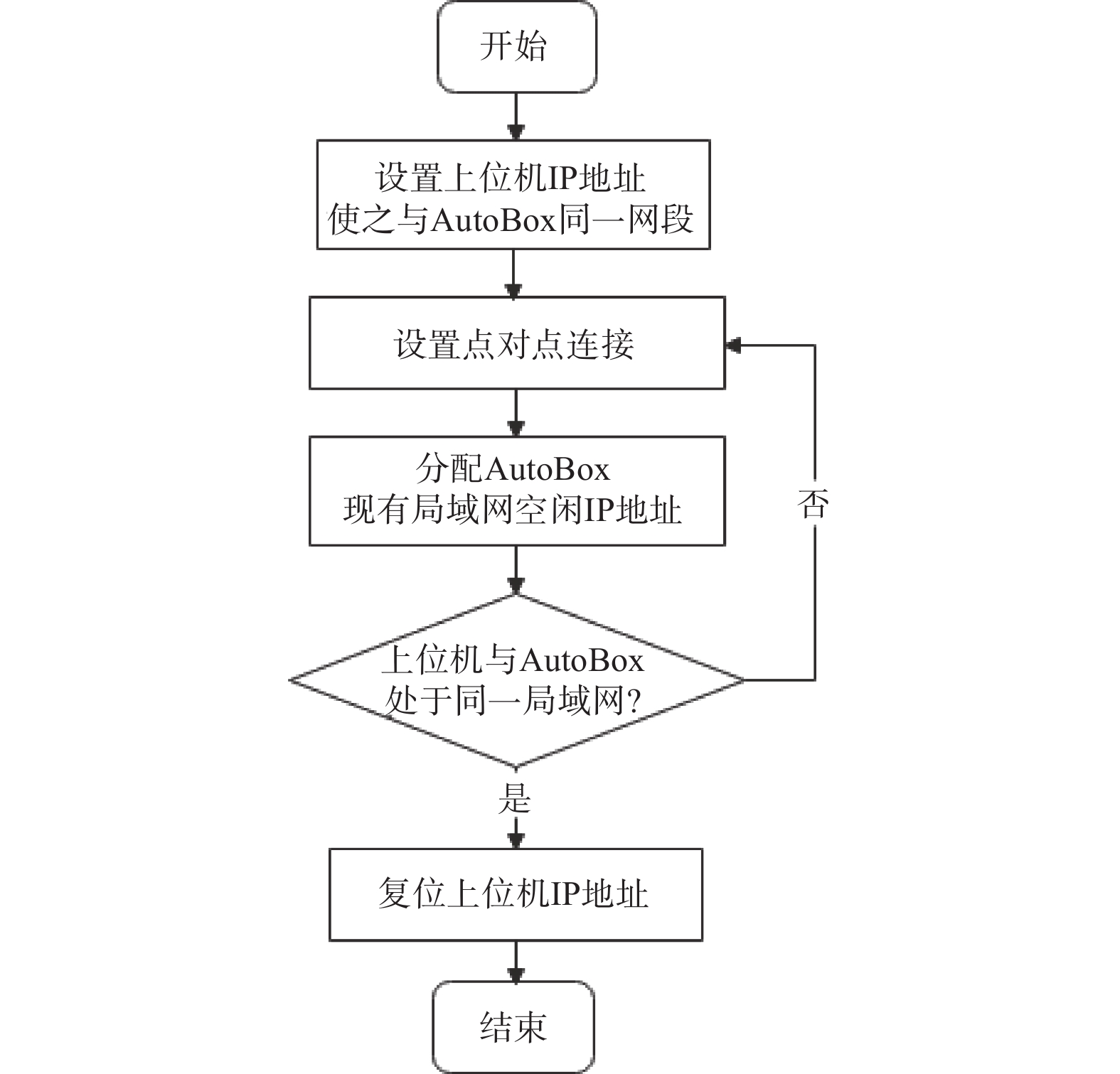
图 12 上位机与AutoBox连接流程图
Figure 12. Flow chart of connection between upper computer and AutoBox
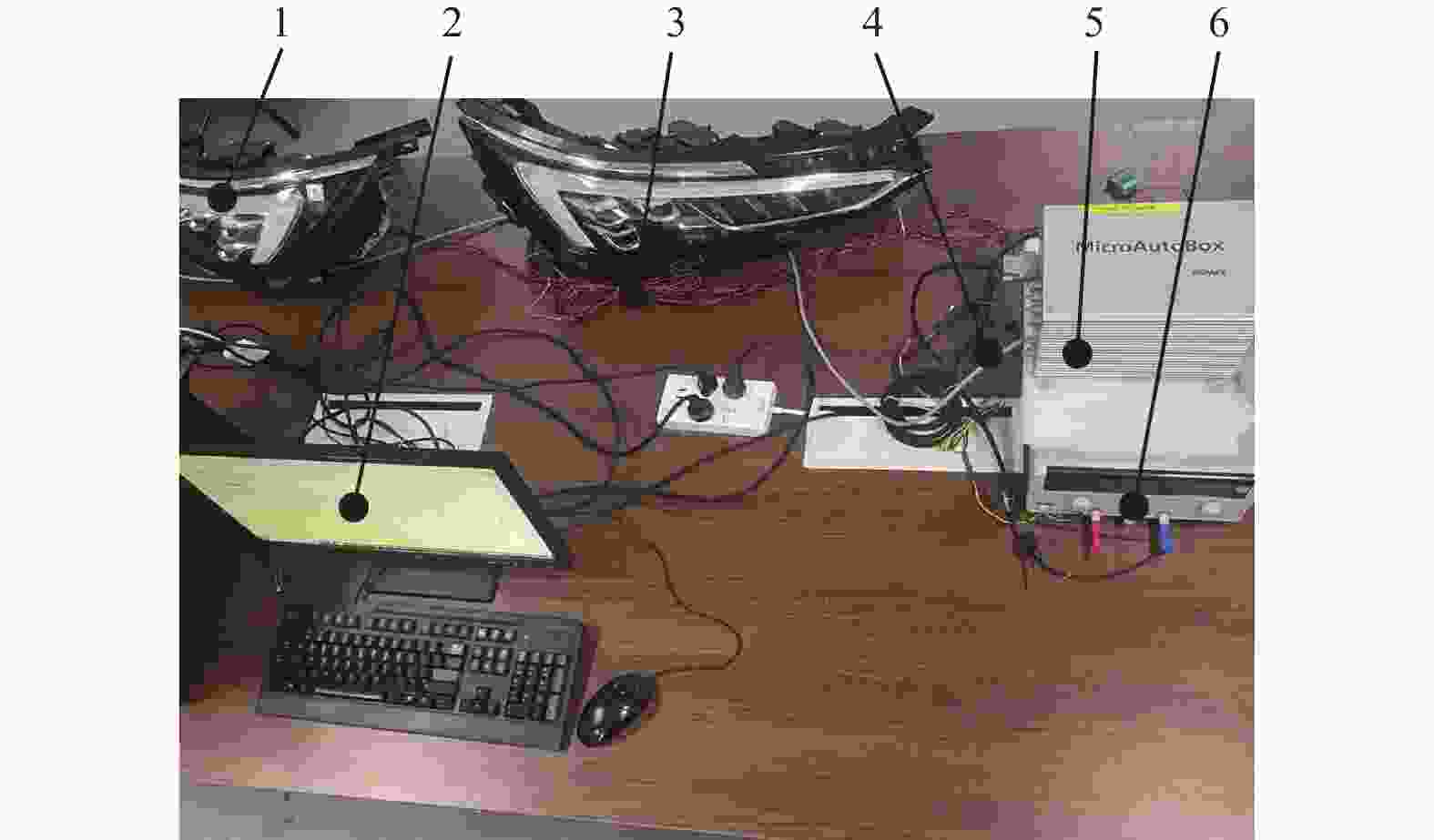
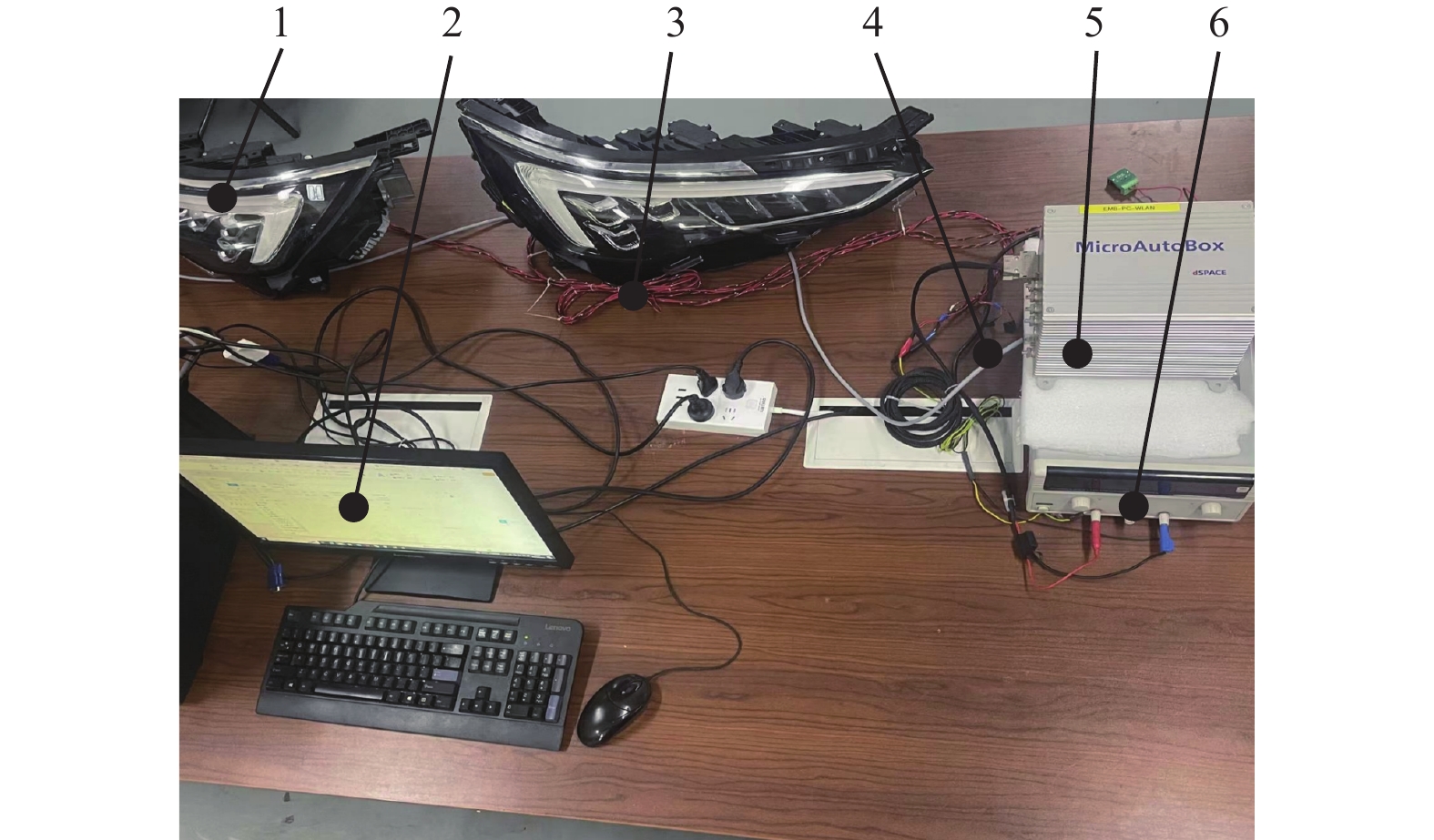
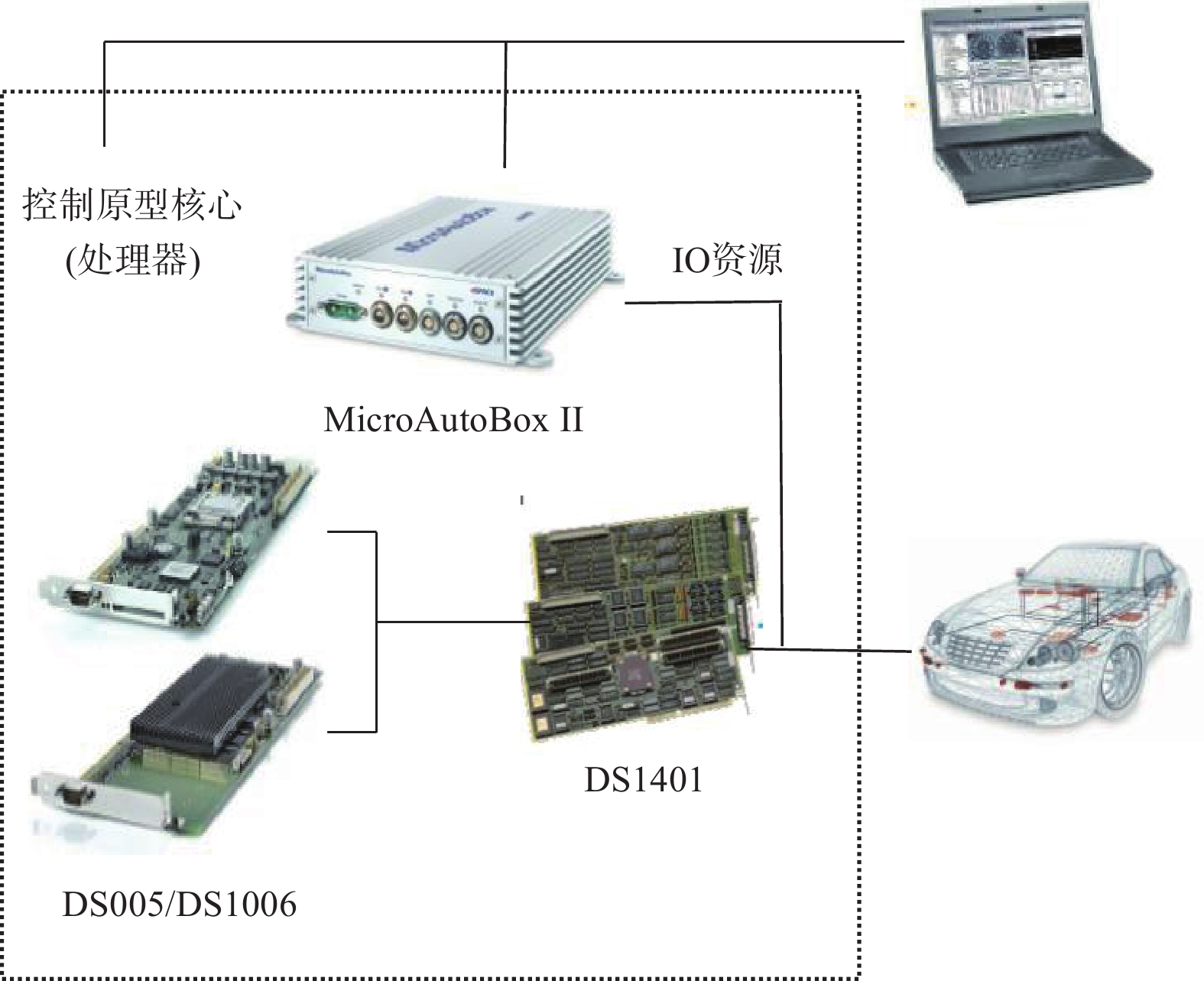
图 13 硬件总体布局图
1—汽车前照灯;2—上位机;3—CAN总线;4—网口;5—MicroAutoBox II;6—电源箱。
Figure 13. General layout of hardware
表 1 车速与制动距离
Table 1. Vehicle speed and braking distance
车速/(km·h−1) 制动距离/m 车速/(km·h−1) 制动距离/m 10 3.6 70 43.5 20 7.6 80 53.7 30 12.7 90 64.9 40 19.0 100 77.0 50 26.2 110 88.4 60 34.4 120 104.2  下载: 导出CSV
下载: 导出CSV
-
[1] 周绍栋, 聂畅, 张辉, 等. 汽车前照灯发展综述与智能化趋势展望[J] . 机械工程学报, 2023, 59(22): 380 − 400. [2] KLOPPENBURG G, WOLF A, LACHMAYER R. High-resolution vehicle headlamps: technologies and scanning prototype[J] . Advanced Optical Technologies, 2016, 5(2): 147 − 155. doi: 10.1515/aot-2016-0001 [3] FAPI C B N, WIRA P, KAMTA M, et al. Simulation and dSPACE hardware implementation of an improved fractional short-circuit current MPPT algorithm for photovoltaic system[J] . Applied Solar Energy, 2021, 57(2): 93 − 106. doi: 10.3103/S0003701X21020080 [4] 詹军, 王启配, 何云廷, 等. 基于dSPACE的嵌入式车辆动力学仿真平台开发[J] . 汽车技术, 2015(4): 18 − 21. doi: 10.3969/j.issn.1000-3703.2015.04.005 [5] 叶玉玲, 赵冉. 水下航行体控制系统快速原型设计[J] . 计算机仿真, 2012, 29(3): 378 − 381. doi: 10.3969/j.issn.1006-9348.2012.03.094 [6] MAHSAHIRUN S N, IDRIS N R N, YUSOF Z M, et al. Fundamental elements of constant volt/hertz induction motor drives based on dSPACE DS1104 controller[J] . International Journal of Power Electronics and Drive Systems, 2020, 11(4): 1670 − 1685. doi: 10.11591/ijpeds.v11.i4.pp1670-1685 [7] PARK S H, IM B U, PARK D K. Model based optimum Pid gain design of adaptive front lighting system[J] . International Journal of Automotive Technology, 2018, 19(5): 923 − 933. [8] 倪彰, 范鑫, 潘茂辉, 等. 基于CAN总线的电动汽车车灯控制系统设计[J] . 传感器与微系统, 2011, 30(12): 82 − 84. doi: 10.3969/j.issn.1000-9787.2011.12.025 [9] LIN C, LIANG S, GONG X L, et al. Coordinated yaw stability control for extreme path tracking of 4WIDEVs based on predictive control[J] . Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2023, 237(8): 1929 − 1946. doi: 10.1177/09544070221103633 [10] 戎辉, 龚进峰, 曹健. 自适应前照灯运动学建模及系统开发[J] . 汽车工程, 2008, 30(12): 1079 − 1082. doi: 10.3321/j.issn:1000-680X.2008.12.012 [11] 魏志翔. 基于CAN总线的车灯控制及电气检测系统研制[D] . 武汉: 华中科技大学, 2013. [12] ZHU B, CHEN Y Z, ZHAO J, et al. Design of an integrated vehicle chassis control system with driver behavior identification[J] . Mathematical Problems in Engineering, 2015, 2015(1): 954514. [13] 周林娜, 王众, 刘金浩, 等. 基于dSPACE的刚柔耦合多电机控制实验平台[J] . 实验技术与管理, 2020, 37(11): 120 − 124. [14] 陈韵, 马清华, 王根, 等. 基于dSPACE的“硬件在回路”导弹控制系统设计与仿真[J] . 弹箭与制导学报, 2019, 39(2): 64 − 68. [15] YANG B, YU T, ZHANG X S, et al. Dynamic leader based collective intelligence for maximum power point tracking of PV systems affected by partial shading condition[J] . Energy Conversion and Management, 2019, 179: 286 − 303. doi: 10.1016/j.enconman.2018.10.074 [16] YAHIAOUI F, CHABOUR F, GUENOUNOU O, et al. Experimental validation and intelligent control of a stand-alone solar energy conversion system using dSPACE platform[J] . Frontiers in Energy Research, 2022, 10: 971384. doi: 10.3389/fenrg.2022.971384 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 842
- HTML全文浏览量: 388
- PDF下载量: 180
- 被引次数: 0
