

Vector control of hybrid magnetized magnetic gear motor based on improved dragonfly algorithm
-
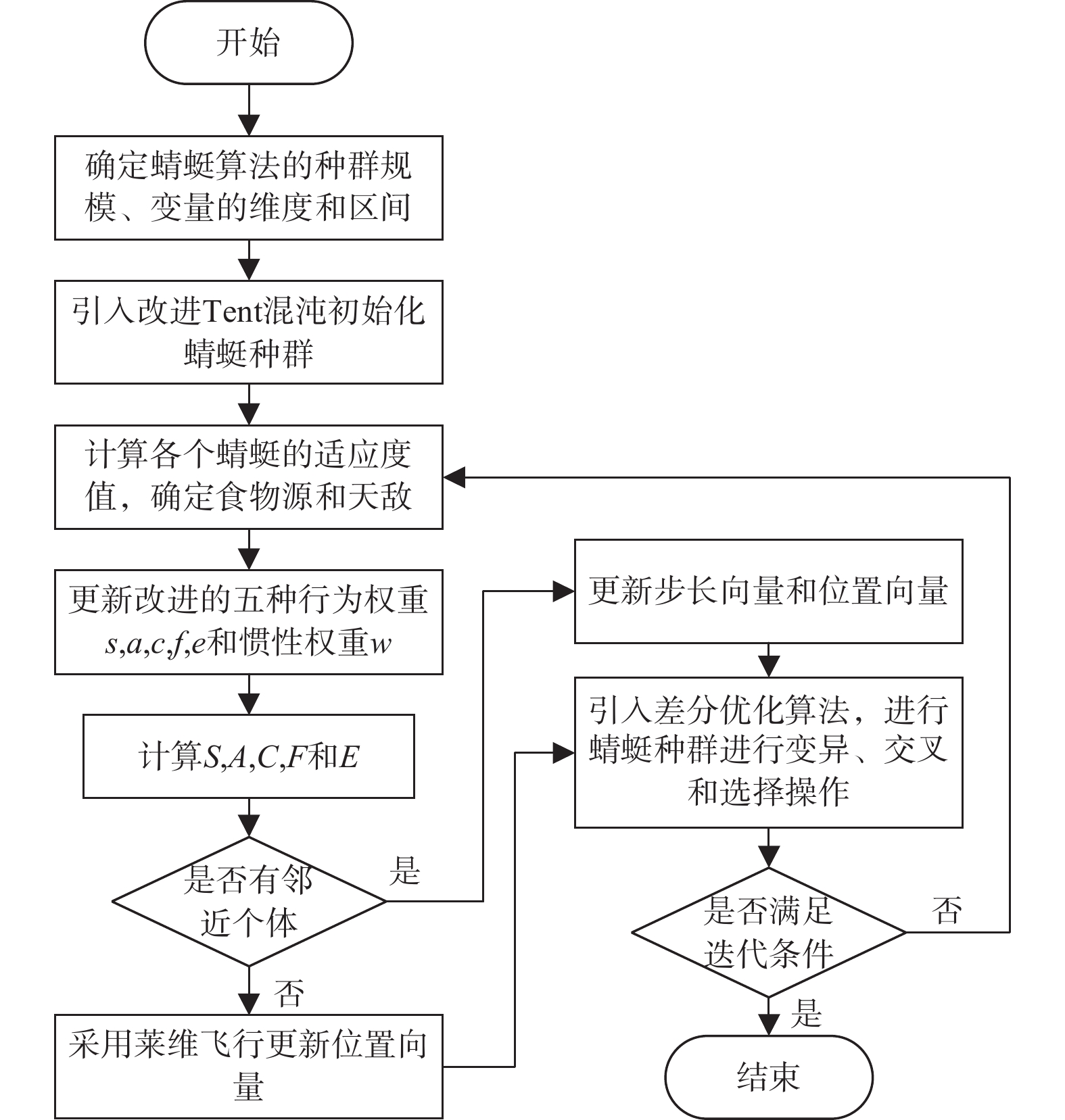
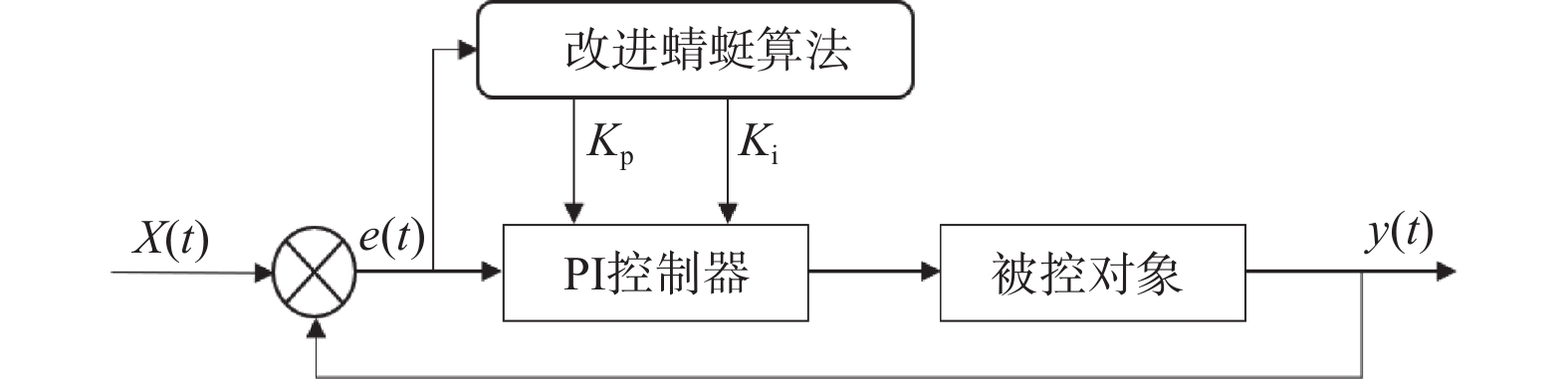
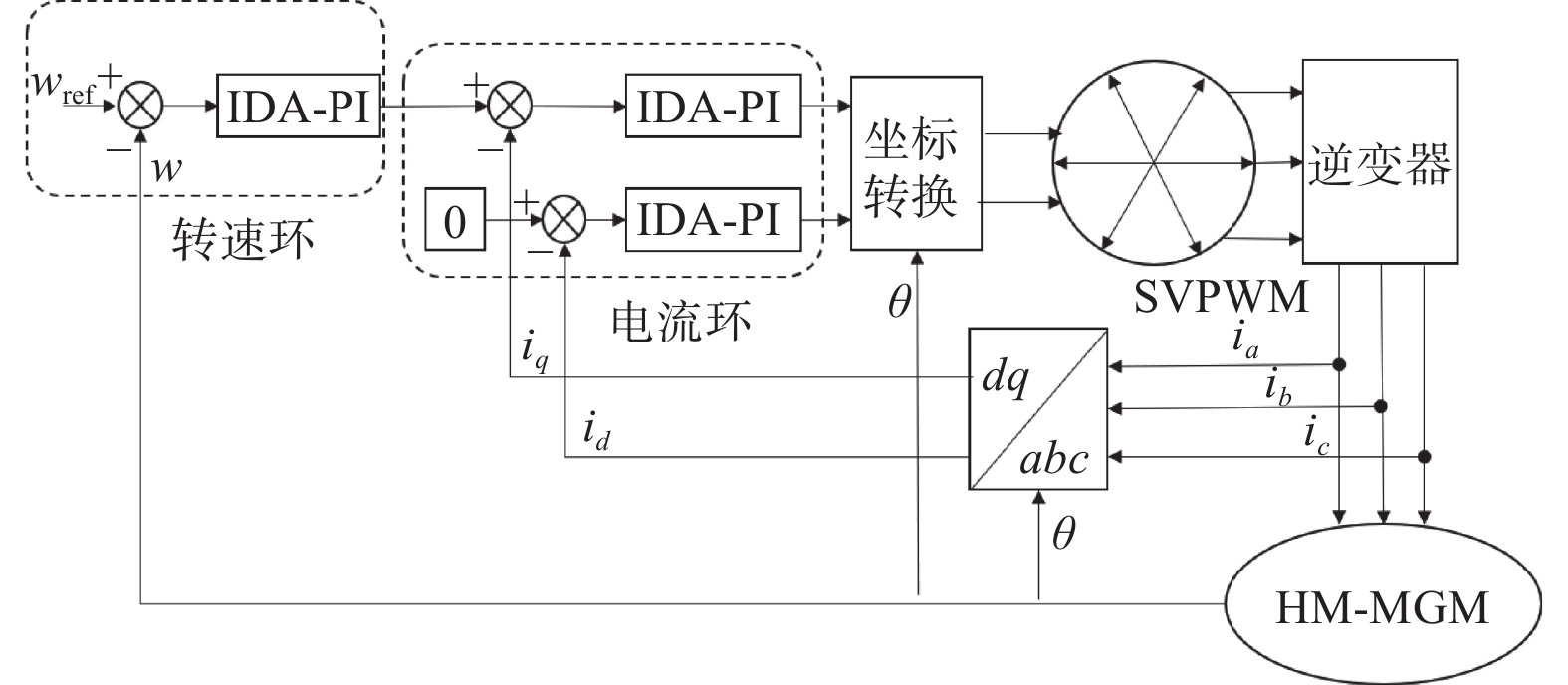
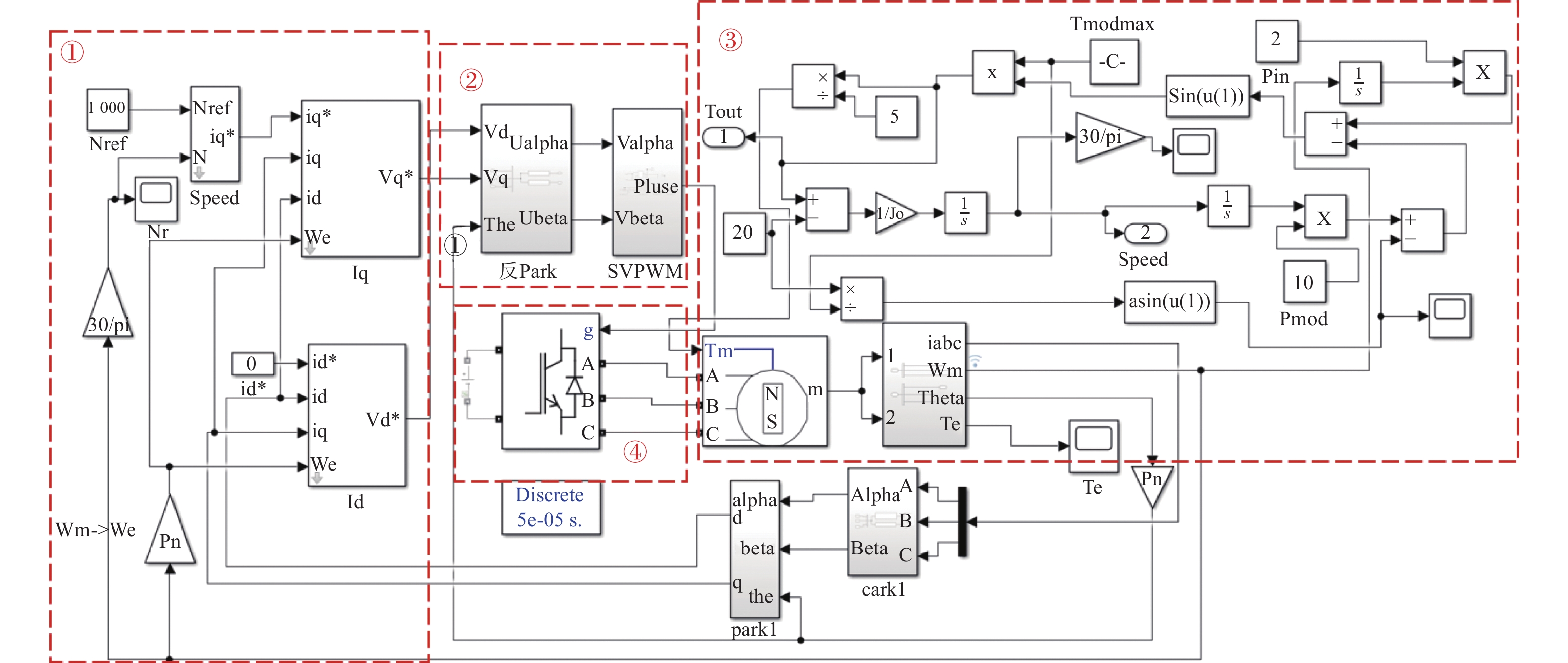
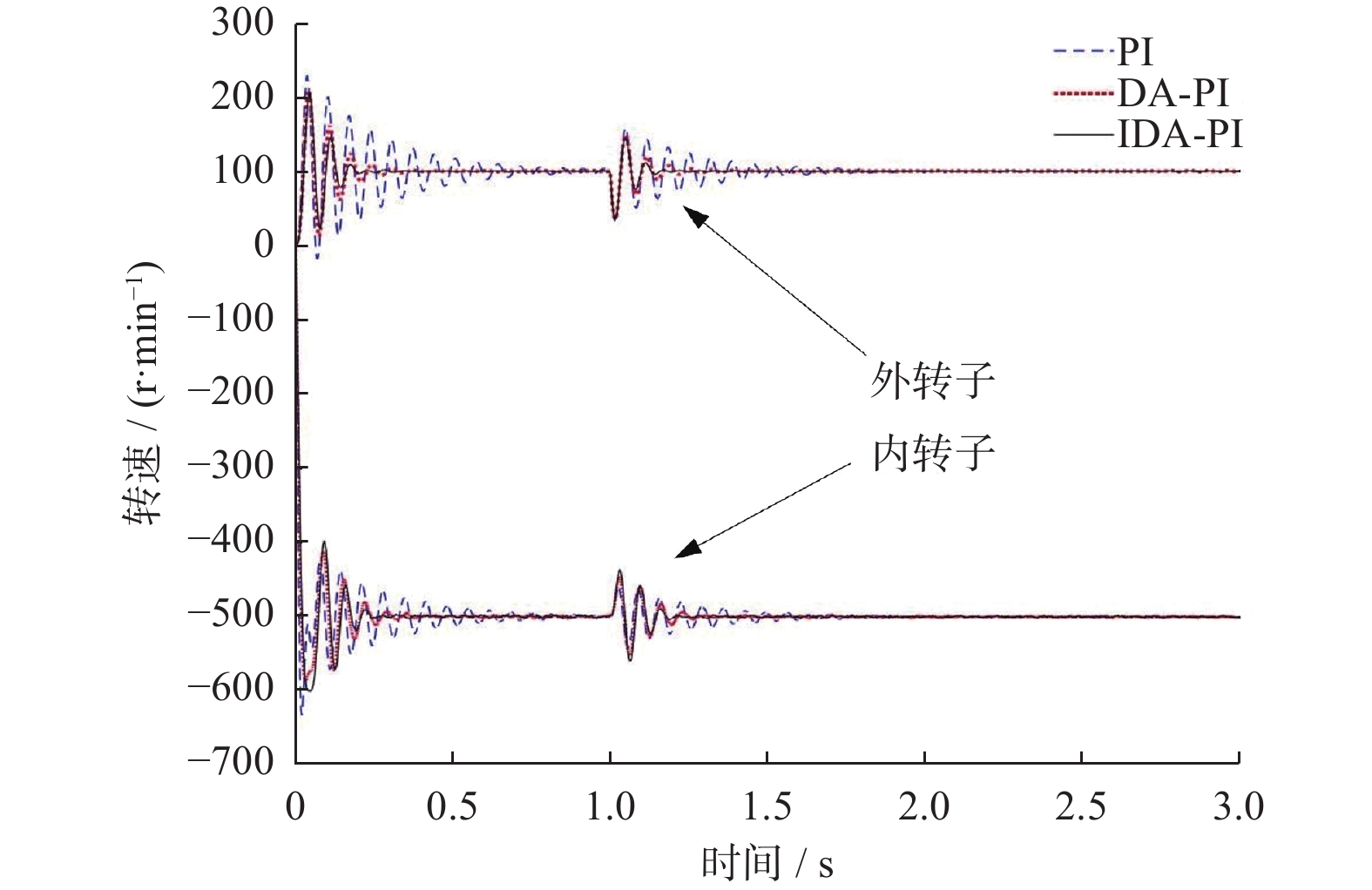
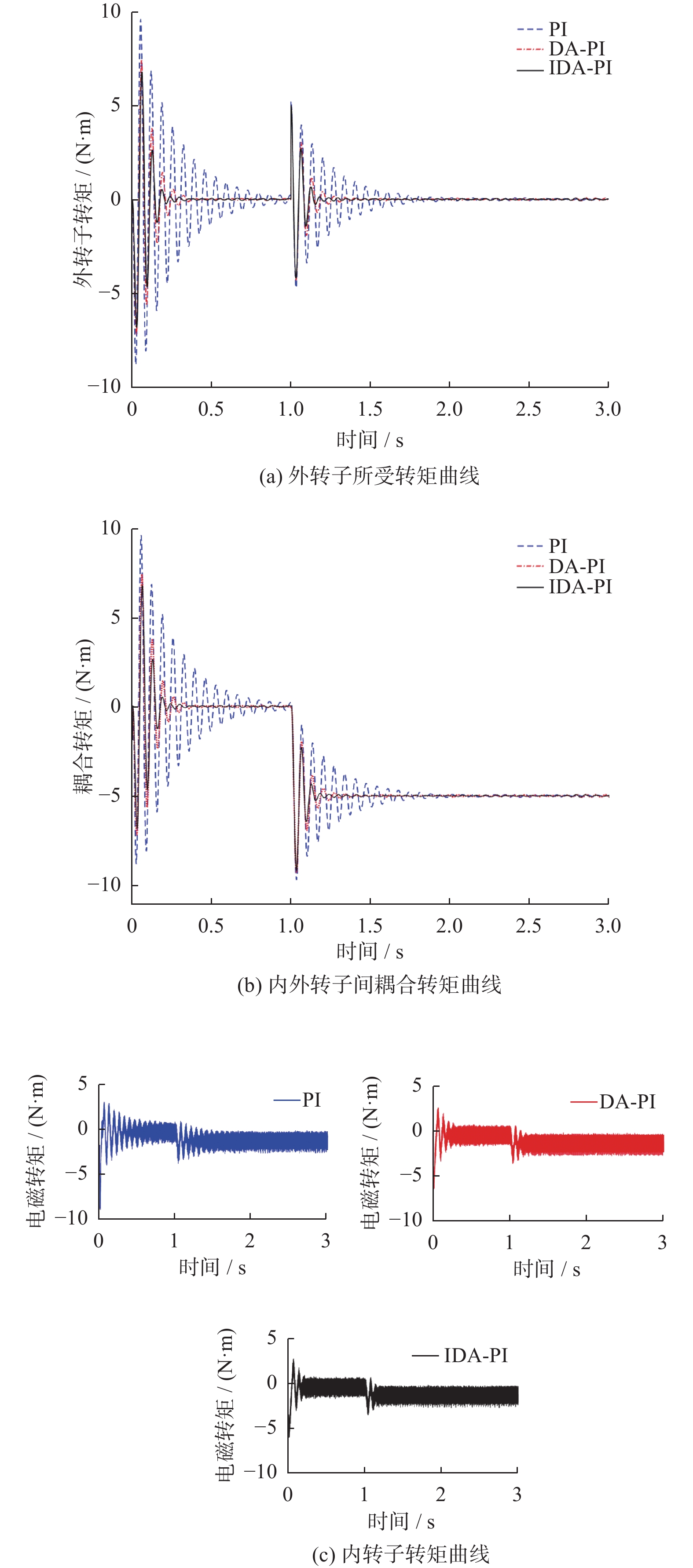
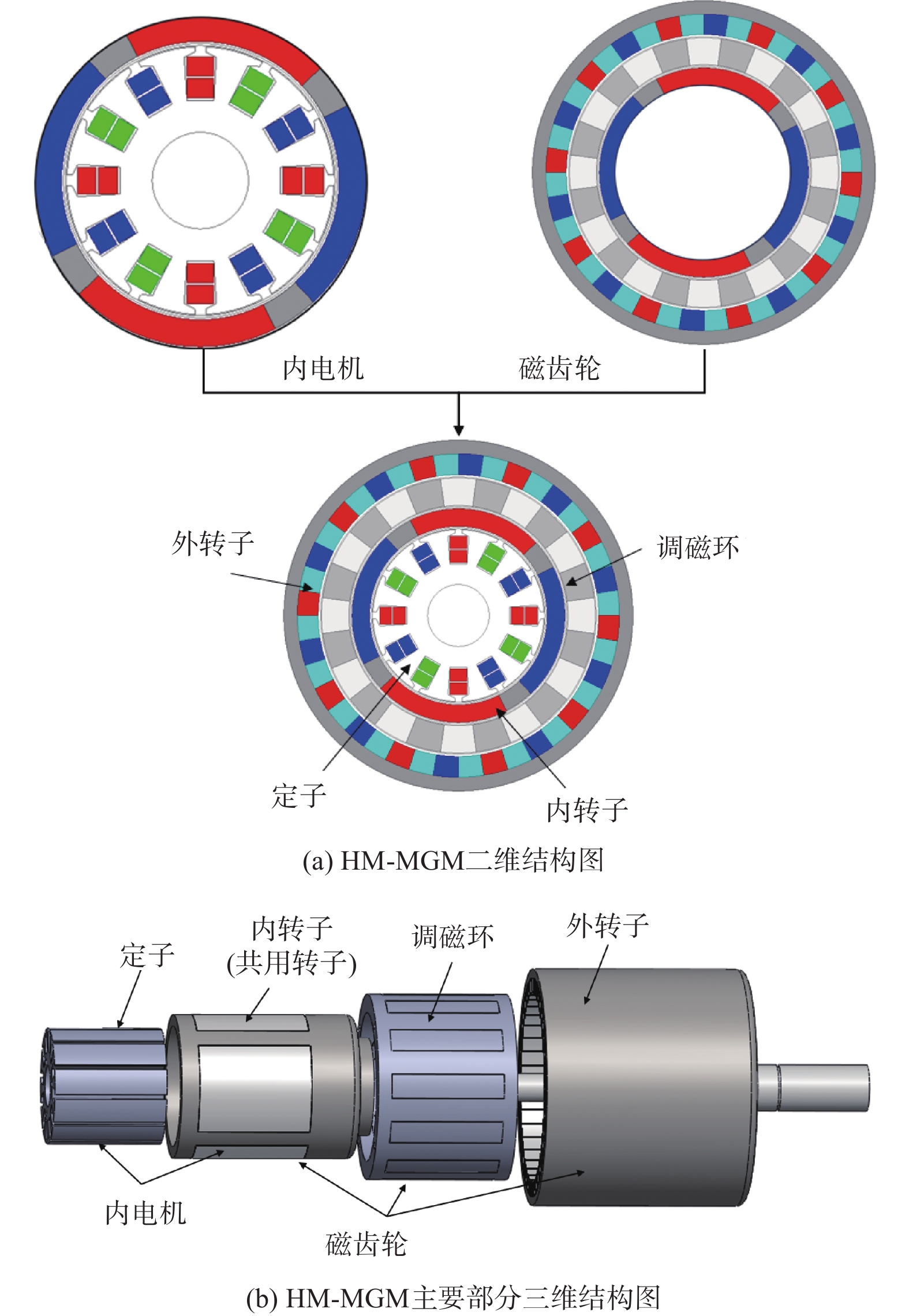
摘要: 针对混合充磁式磁齿轮电机 (HM-MGM)无接触传动时出现振荡和超调的问题,提出一种将改进蜻蜓算法(improved dragonfly algorithm, IDA)与比例积分(proportional-integral, PI)控制相结合,对PI控制器参数整定的方法。通过引入Tent映射初始化群、改进权重系数和引入差分进化算法,实现算法性能的提升;并改进算法的适应度函数,增加可以抑制超调和振荡的惩罚项。基于HM-MGM仿真模型,采用PI、DA-PI和IDA-PI控制方法进行动态仿真对比研究,结果表明:电机在IDA-PI控制下的系统动态响应速度更快,且超调量和稳态误差明显降低,证明了所提策略的有效性。Abstract: Aiming at the problems of oscillation and overshoot in the contactless drive of a hybrid magnetized magnetic gear motor (HM-MGM), a method combining an improved dragonfly algorithm (IDA) with (proportional-integral) PI control was proposed to adjust the PI controller parameters. The performance of the algorithm was improved by introducing Tent map for initialization group, improving weight coefficients and incorporating a differential evolution algorithm. Furthermore, the fitness function of the algorithm was improved by adding a penalty term to suppress overshoot and oscillation. Based on the HM-MGM simulation model, a comparative study was conducted using PI, DA-PI and IDA-PI control methods. The results show that the system under IDA-PI control exhibits a faster dynamic response, with significantly reduced overshoot and steady-state error, thereby validating the effectiveness of the proposed method.
-
Key words:
- hybrid magnetization /
- magnetic gear motor /
- inertia weight /
- vector control /
- dragonfly algorithm
-
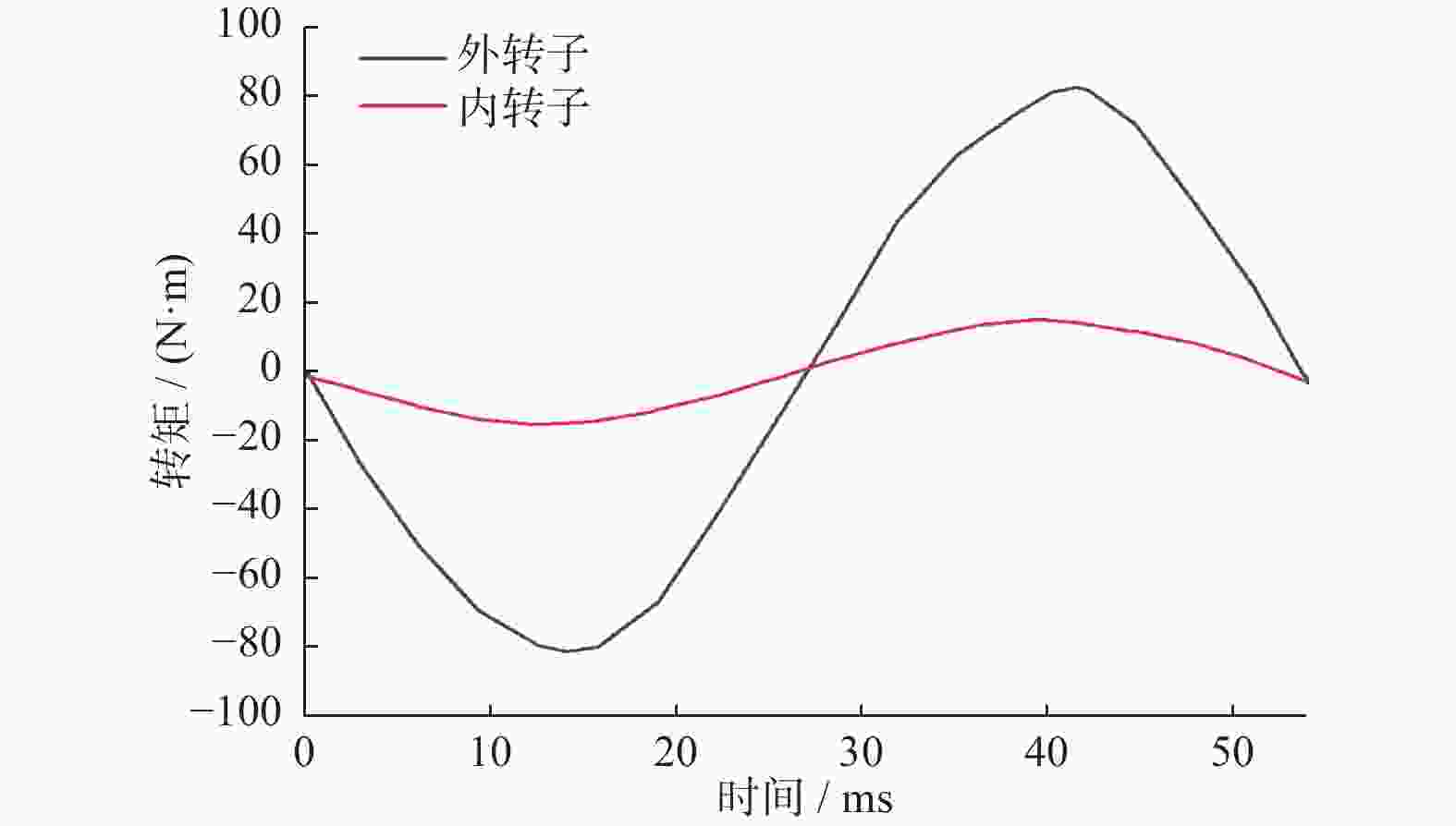
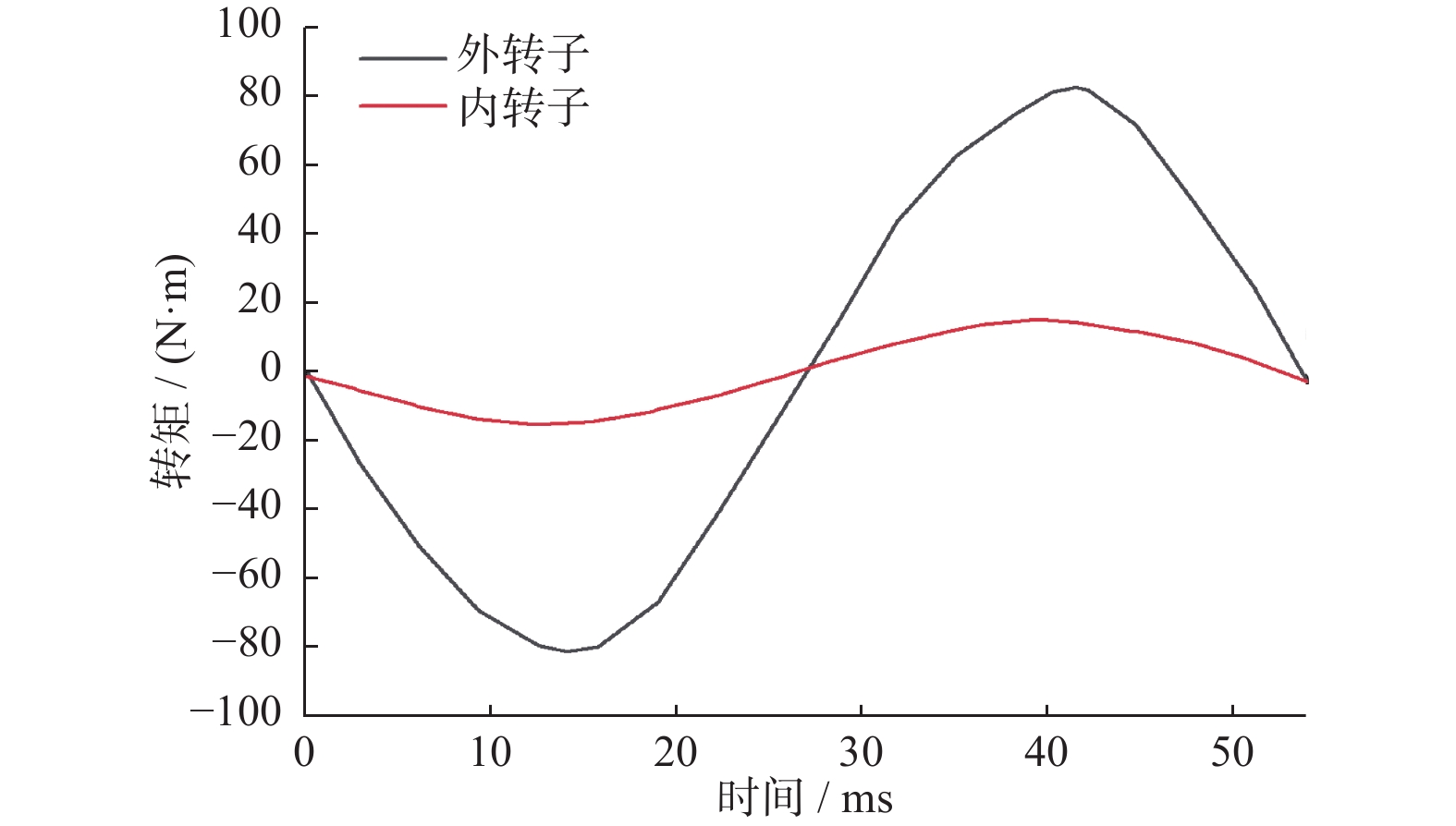
图 3 HM-MGM内外转子矩角特性曲线
Figure 3. HM-MGM internal and external rotor moment and angle characteristic curves
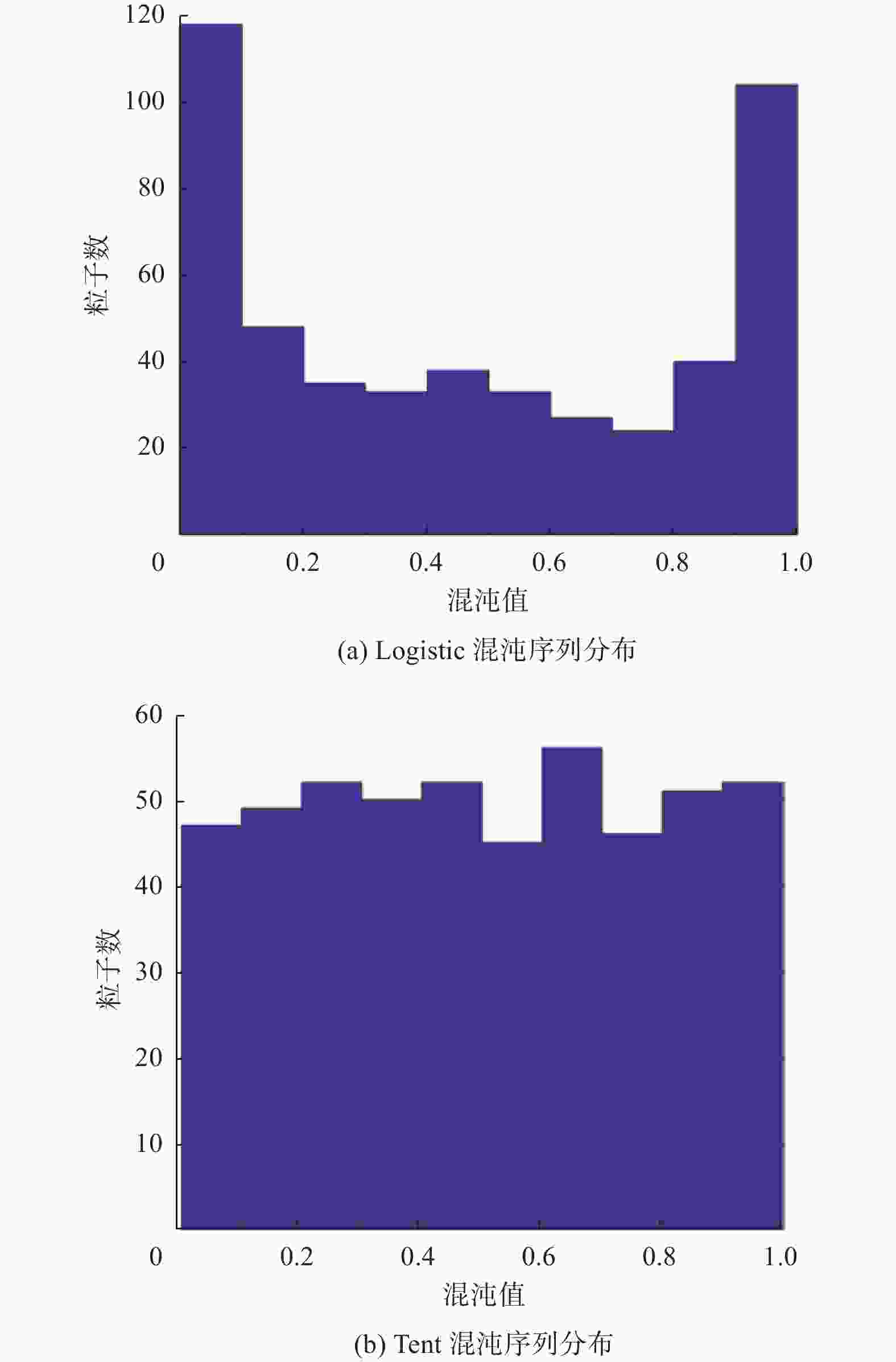
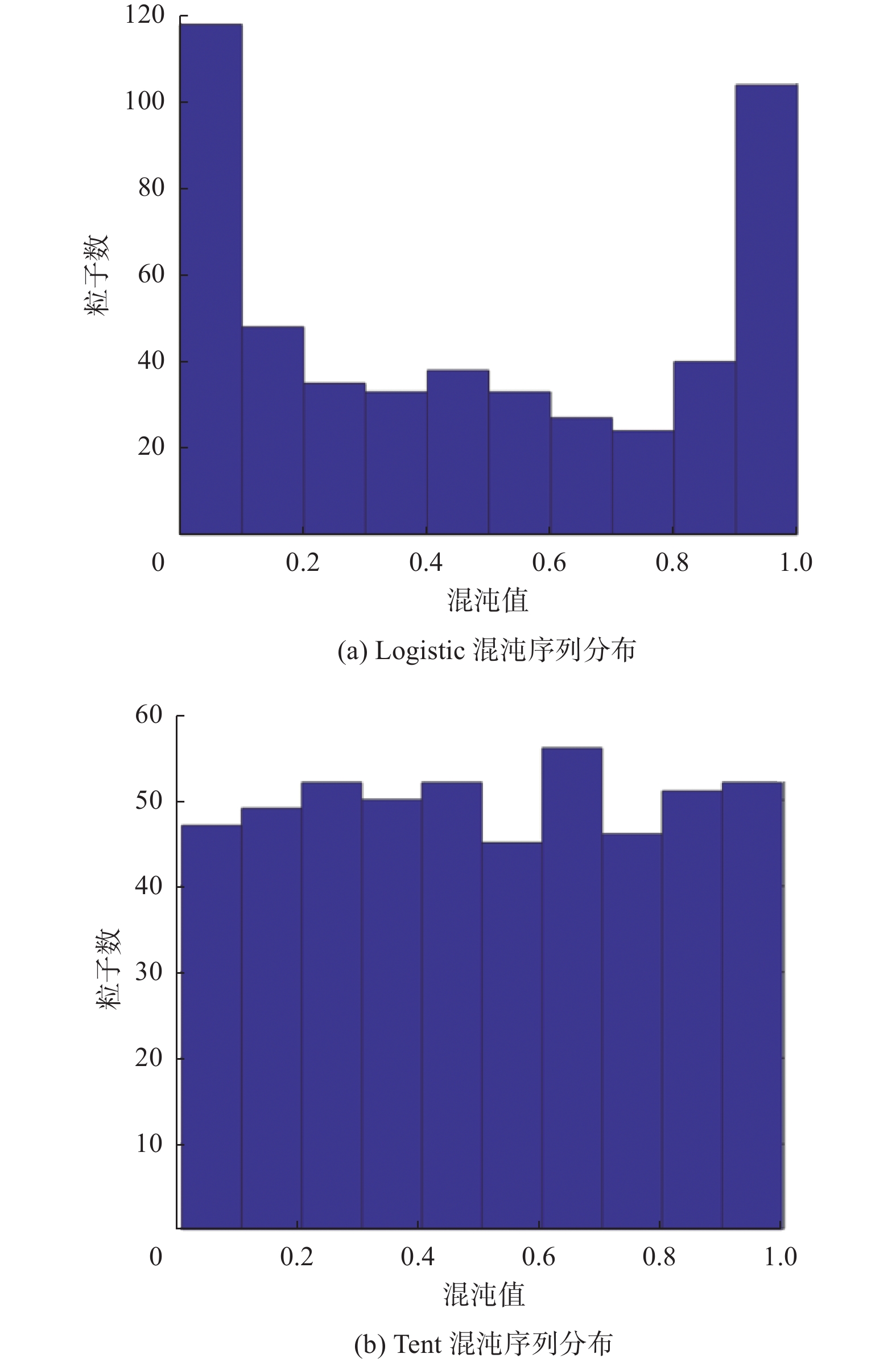
图 5 Logistic和Tent映射粒子区间分布
Figure 5. Logistic and Tent mapping particle interval distribution
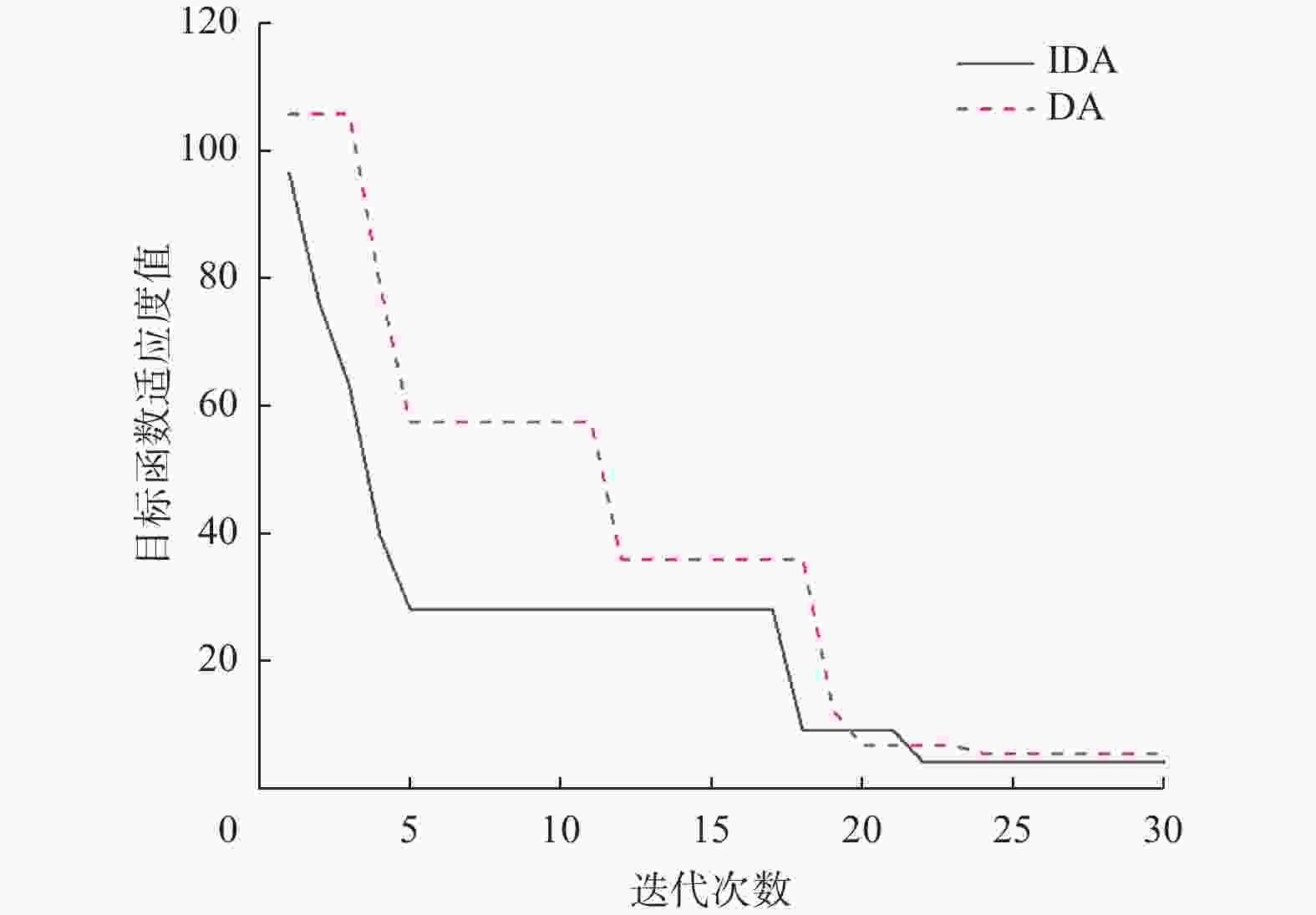
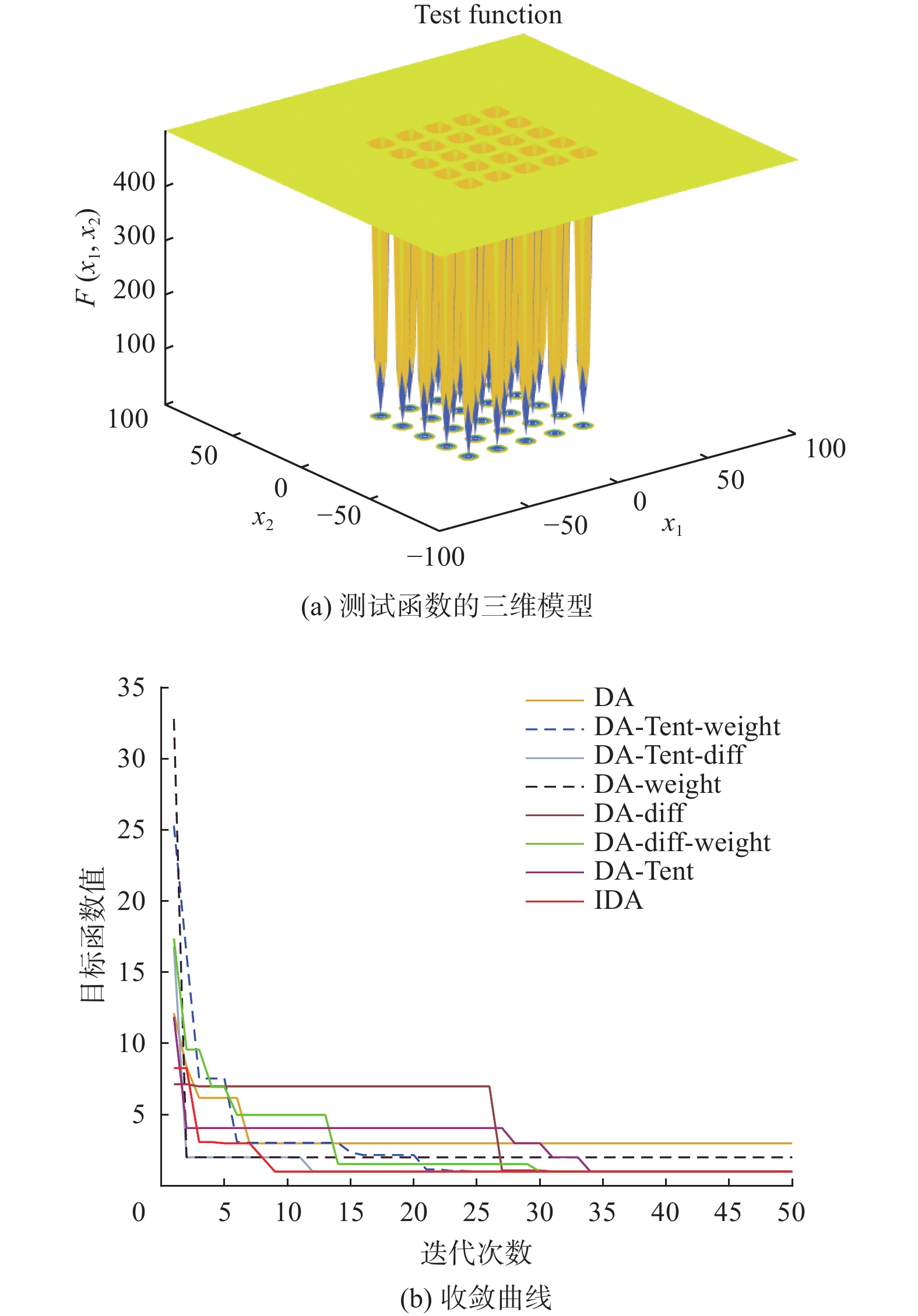
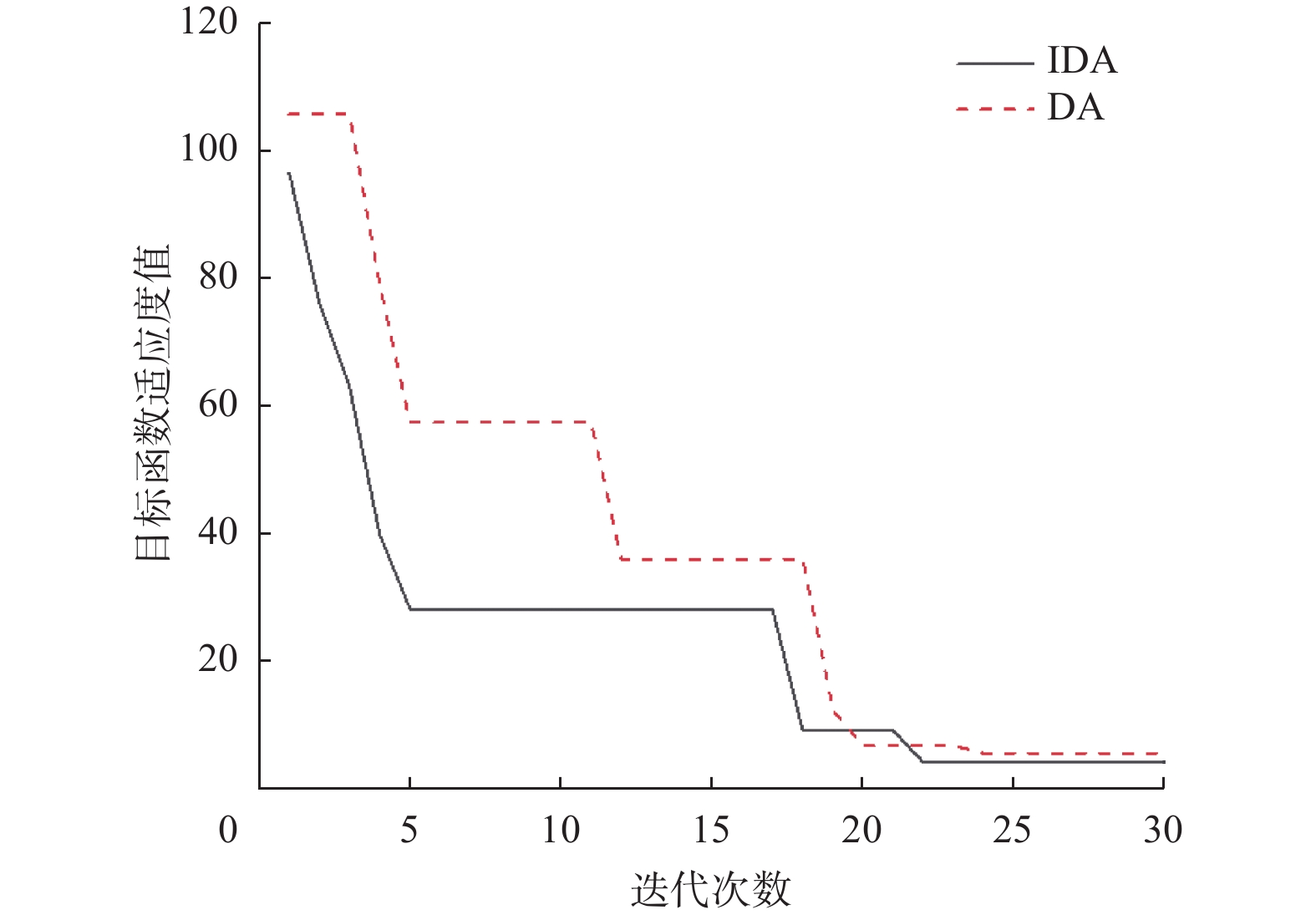
图 11 DA和IDA适应度函数值的收敛曲线
Figure 11. Convergence curves of DA and IDA fitness function values
表 1 算法优化结果
Table 1. Algorithm optimization results
算法 平均值 标准差 DA 2.16504 3.38014 DA-Tent 1.85023 1.11285 DA-weight 1.68553 1.23242 DA-diff 1.75434 1.10568 DA-Tent-weight 1.21243 0.47751 DA-Tent-diff 1.15149 0.23354 DA-diff-weight 1.15286 0.21156 IDA 1.00945 0.10855  下载: 导出CSV
下载: 导出CSV
表 2 HM-MGM参数
Table 2. HM-MGM parameters
主要参数 数值 主要参数 数值 定子电阻/Ω 1.2 外转子转动惯量/(kg·m2) 0.007538 功率/kW 0.2 内转子转动惯量/(kg·m2) 0.001540 内转子极对数 2 直轴电感/mH 7.3152 外转子极对数 10 交轴电感/mH 7.3198 调磁块数 12 阻尼系数/(N·m·s) 0.008 传动比 5 永磁体磁链/Wb 0.2864
下载: 导出CSV
-
[1] 程明, 文宏辉, 花为, 等. 电机气隙磁场调制统一理论及其典型应用[J] . 中国电机工程学报, 2021, 41(24): 8261 − 8282. doi: 10.13334/j.0258-8013.pcsee.211703 [2] 杨洪静. 磁性谐波齿轮结构、原理及其主要性能的研究[D] . 上海: 东华大学, 2023. [3] MONTAGUE R G, BINGHAM C M, ATALLAH K. Magnetic gear dynamics for servo control[C] //Proceedings of the 15th IEEE Mediterranean Electrotechnical Conference. Valletta: IEEE, 2010: 1192 − 1197. [4] 顾亚明. 基于改进CPSO算法的无刷直流电机PI控制器[J] . 软件导刊, 2022, 21(10): 131 − 135. doi: 10.11907/rjdk.221044 [5] 何兵. 基于改进粒子群算法的LC型逆变器PI参数优化[J] . 电工技术, 2022(2): 10 − 12, 38. doi: 10.19768/j.cnki.dgjs.2022.02.005 [6] 吕红芳, 王涛, 嵇月强, 等. 基于免疫粒子群算法的PID参数优化研究[J] . 中国工程机械学报, 2022, 20(3): 194 − 198. doi: 10.15999/j.cnki.311926.2022.03.006 [7] 林军, 倪宏, 孙鹏, 等. 一种采用神经网络PID控制的自适应资源分配方法[J] . 西安交通大学学报, 2013, 47(4): 112 − 117, 136. doi: 10.7652/xjtuxb201304019 [8] MIRJALILI S. Dragonfly algorithm: a new meta-heuristic optimization technique for solving single-objective, discrete, and multi-objective problems[J] . Neural Computing and Applications, 2016, 27(4): 1053 − 1073. doi: 10.1007/s00521-015-1920-1 [9] 杨岸涛, 井立兵, 李浩. 一种混合充磁同心磁齿轮及其复合电机分析[J] . 微特电机, 2017, 45(4): 31 − 33, 38. [10] 井立兵, 章跃进, 李琛, 等. Halbach阵列同心式磁力齿轮磁场分析与优化设计[J] . 中国电机工程学报, 2013, 33(21): 163 − 169. doi: 10.13334/j.0258-8013.pcsee.2013.21.012 [11] 张文海. 步进电动机矩角特性的测试[J] . 电气试验, 1999(3): 25 − 27. [12] MONTAGUE R, BINGHAM C, ATALLAH K. Servo control of magnetic gears[J] . IEEE/ASME Transactions on Mechatronics, 2012, 17(2): 269 − 278. doi: 10.1109/TMECH.2010.2096473 [13] 张韬, 王阳, 王言子, 等. 蜻蜓算法优化的高斯过程回归对锂电池健康状态预测[J] . 重庆理工大学学报(自然科学), 2023, 37(11): 352 − 361. doi: 10.3969/j.issn.1674-8425(z).2023.11.038 [14] 龙文, 伍铁斌, 唐斌. 收敛因子非线性变化的鲸鱼优化算法[J] . 兰州理工大学学报, 2017, 43(6): 102 − 107. [15] KAUR G, ARORA S. Chaotic whale optimization algorithm[J] . Journal of Computational Design and Engineering, 2018, 5(3): 275 − 284. doi: 10.1016/j.jcde.2017.12.006 [16] STORN R, PRICE K. Differential evolution – a simple and efficient heuristic for global optimization over continuous spaces[J] . Journal of Global Optimization, 1997, 11(4): 341 − 359. doi: 10.1023/A:1008202821328 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 248
- HTML全文浏览量: 134
- PDF下载量: 130
- 被引次数: 0
