

Hysteresis compensation and positive velocity-position feedback resonance control of piezoelectric driven nanopositioning stage
-
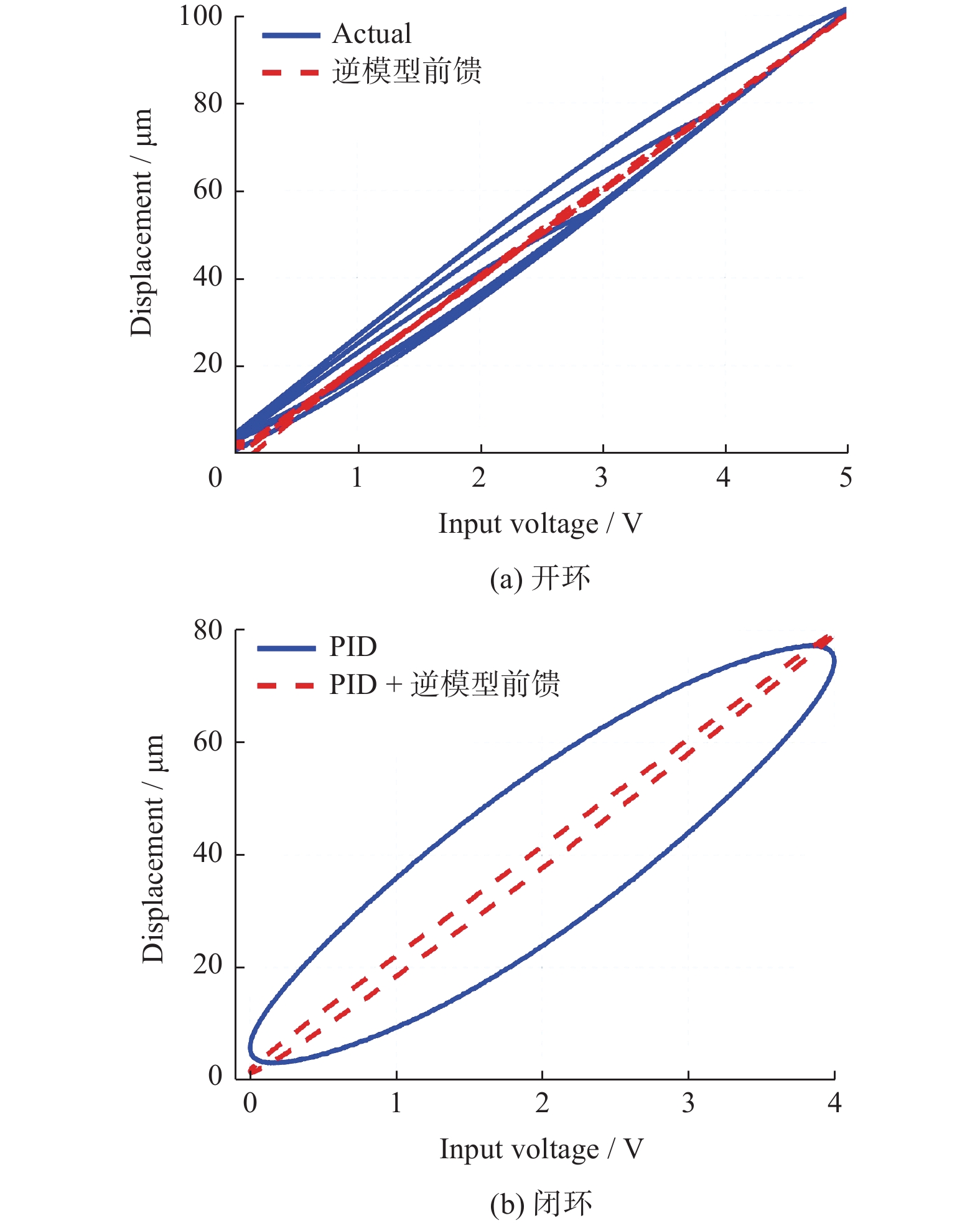
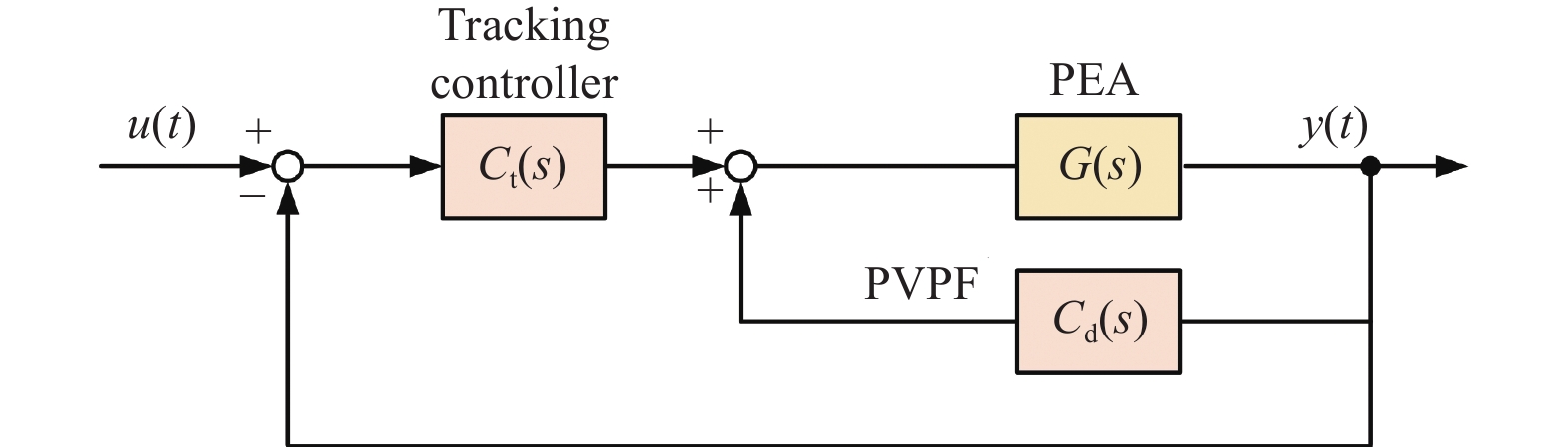
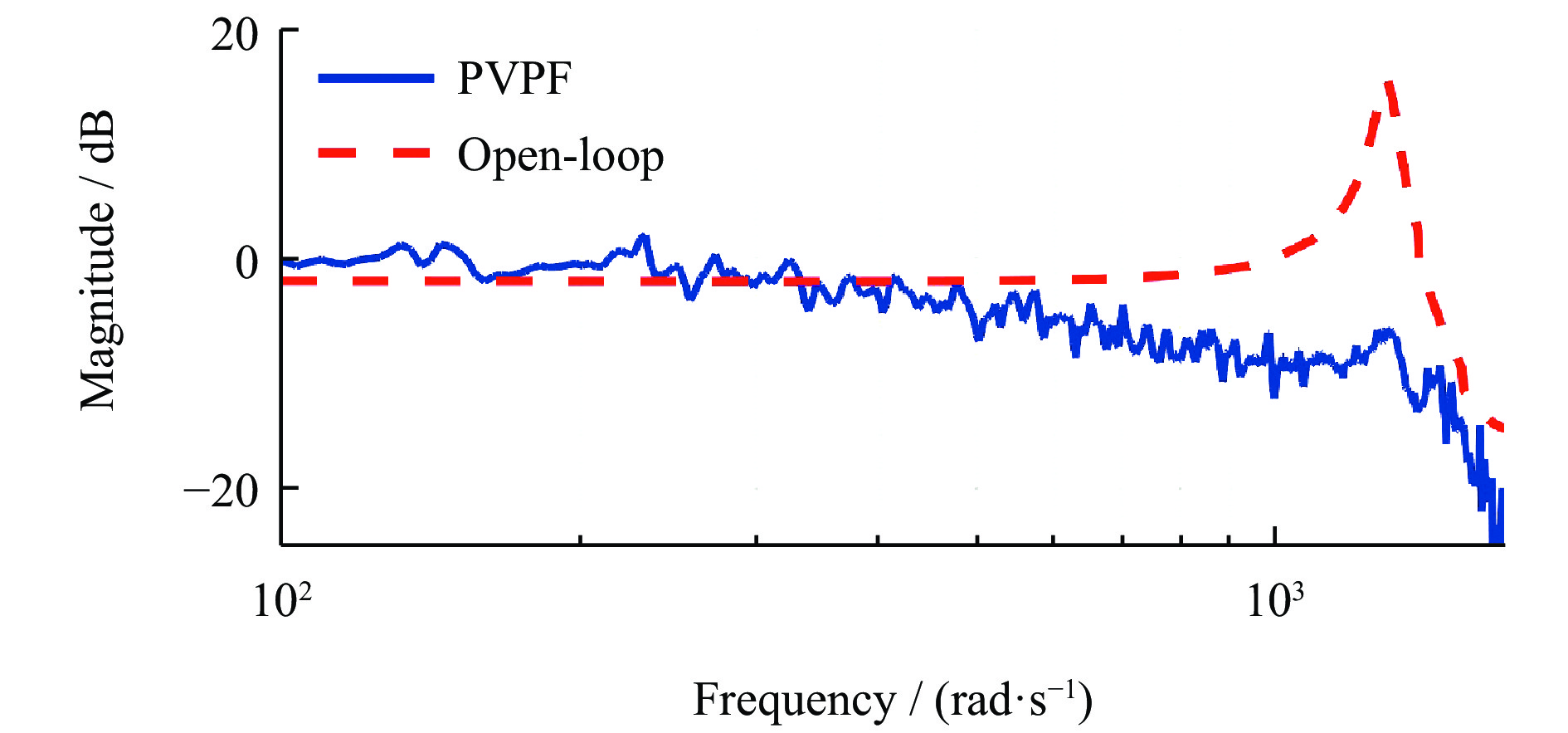
摘要: 为解决压电驱动纳米定位平台的迟滞问题与低阻尼谐振问题,构建了三自由度压电驱动纳米定位平台实验系统,分析定位平台的迟滞和谐振特性。建立率相关Prandtl-Ishlinskii迟滞模型,对逆模型进行参数辨识,通过开环和闭环前馈补偿实验验证了模型的有效性和准确性。采用基于巴特沃斯滤波器形式的极点配置方法,设计了积分跟踪控制器和速度−位置正反馈阻尼控制器的参数,并验证了阻尼控制器的有效性。通过复合控制方法进行轨迹跟踪实验,实验结果表明,该方法显著提升了压电定位台的跟踪精度与速度,证明所提控制方法的有效性。Abstract: To address the hysteresis and low damping resonance problems of piezoelectric driven nanopositioning stages, a three-degree-of-freedom piezoelectric driven nanopositioning stage experimental system was constructed, and the hysteresis and resonance characteristics were analyzed. A rate-dependent Prandtl-Ishlinskii hysteresis model was established, and the parameters of its inverse model were identified. The effectiveness and accuracy of the model were verified through open-loop and close-loop feedforward compensation experiments. Subsequently, a pole placement method based on a Butterworth filter was employed to design the parameters of an integral tracking controller and a positive velocity-position feedback (PVPF) damping controller, and the effectiveness of the damping controller was verified. Finally, trajectory tracking experiments were conducted using a composite control method. The experimental results show that this method significantly improves the tracking accuracy and speed of the piezoelectric positioning stage, demonstrating the effectiveness of the proposed control method.
-
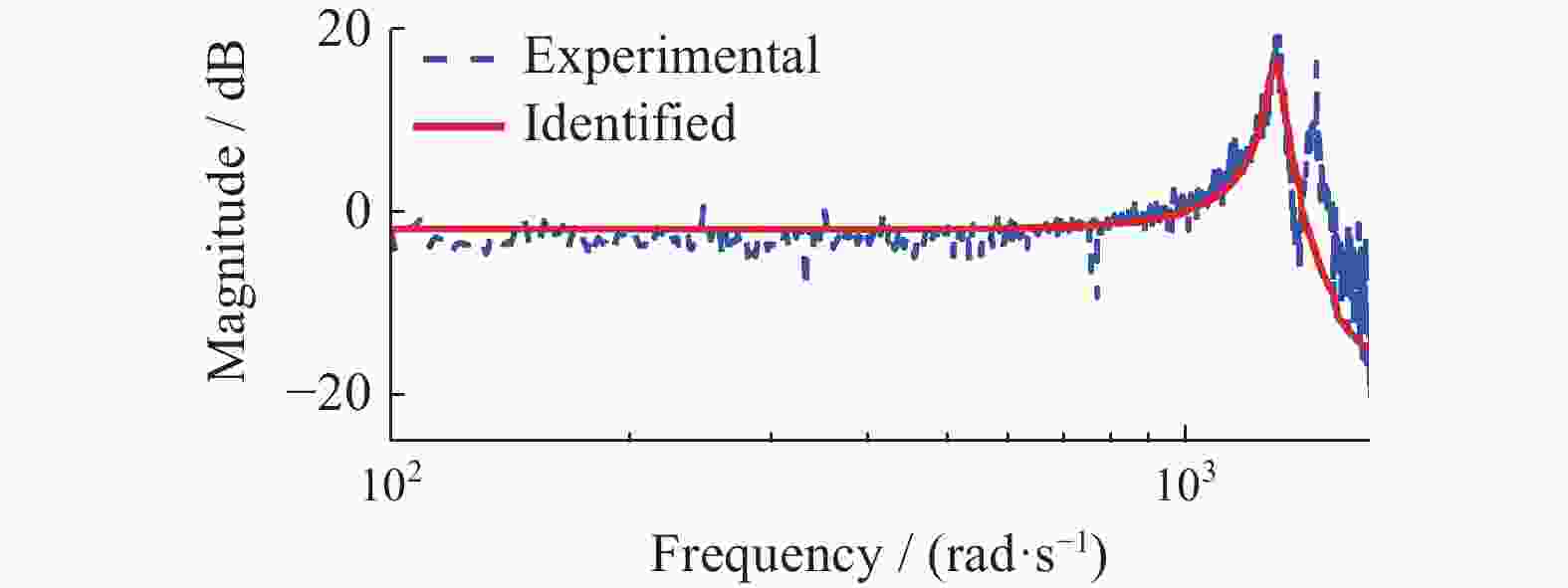
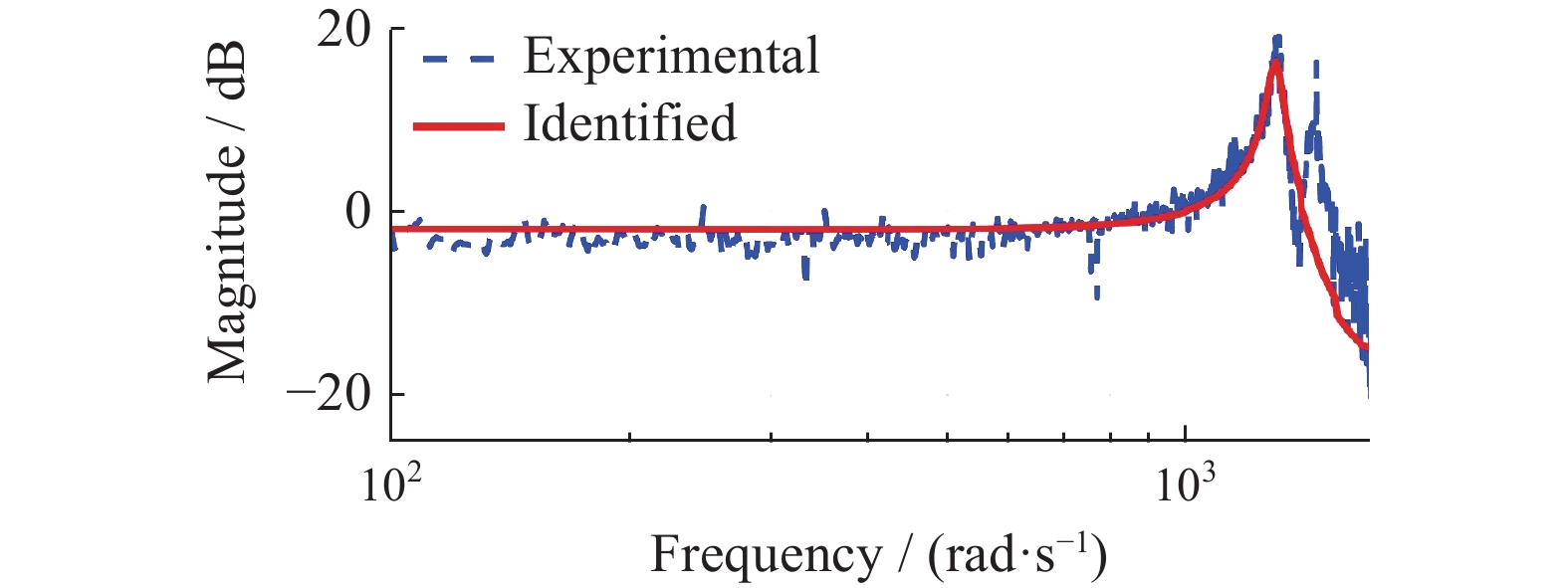
图 6 平台辨识结果与实际频响对比
Figure 6. Comparison of frequency response between stage identification results and actual results
表 1 迟滞逆模型辨识参数
Table 1. Identification parameters of inverse hysteresis model
变量 数值 变量 数值 a1 0.002 0 b4 −0.058 6 a2 1.291 0 b5 −0.009 7 a3 0.006 8 b6 −0.023 9 a4 0.007 3 b7 −0.020 9 b1 −0.136 5 b8 0 b2 −0.150 1 b9 −0.005 3 b3 −0.129 8 b10 −0.209 8  下载: 导出CSV
下载: 导出CSV
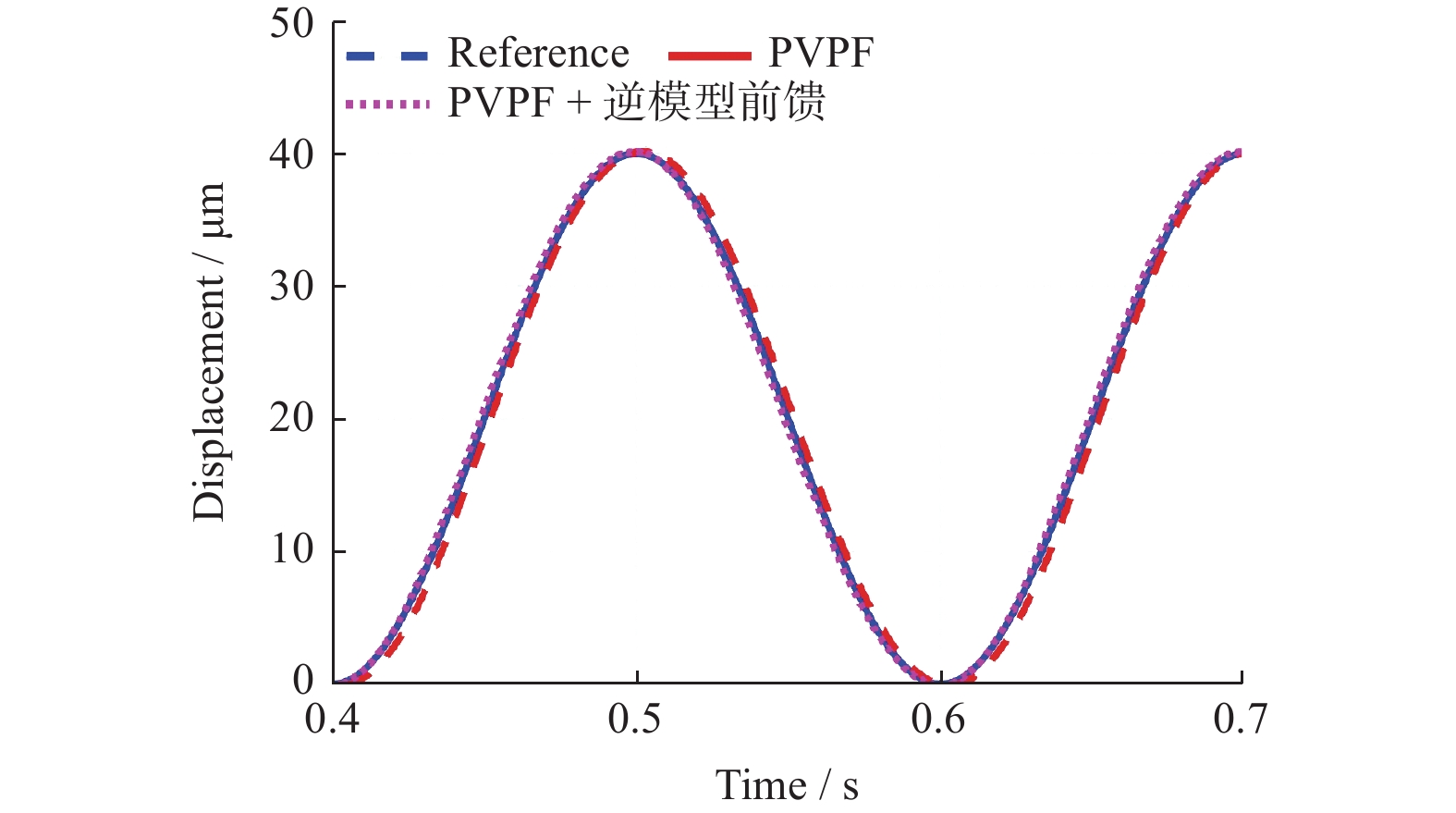
表 2 余弦信号跟踪误差
Table 2. Cosine signal tracking error
单位:μm 模型 最大误差 均方根误差 PVPF 1.446 6 0.978 7 PVPF + 逆模型前馈 0.931 6 0.486 8
下载: 导出CSV
-
[1] 范伟, 余晓芬, 奚琳. 压电陶瓷驱动系统及控制方法研究[J] . 光学精密工程, 2007, 15(3): 368 − 371. [2] LI L L, LI C X, GU G Y, et al. Positive acceleration, velocity and position feedback based damping control approach for piezo-actuated nanopositioning stages[J] . Mechatronics, 2017, 47: 97 − 104. doi: 10.1016/j.mechatronics.2017.09.003 [3] LING J, FENG Z, MING M, et al. Damping controller design for nanopositioners: a hybrid reference model matching and virtual reference feedback tuning approach[J] . International Journal of Precision Engineering and Manufacturing, 2018, 19(1): 13 − 22. doi: 10.1007/s12541-018-0002-6 [4] DAI Y L, LI D Q, WANG D. Review on the nonlinear modeling of hysteresis in piezoelectric ceramic actuators[J] . Actuators, 2023, 12(12): 442. doi: 10.3390/act12120442 [5] GAN J Q, MEI Z, CHEN X L, et al. A modified Duhem model for rate-dependent hysteresis behaviors[J] . Micromachines, 2019, 10(10): 680. doi: 10.3390/mi10100680 [6] 顾胜良, 王建平, 胡红专, 等. 基于Preisach模型的光纤定位单元R机构精定位的实现[J] . 光学精密工程, 2022, 30(18): 2205 − 2218. [7] SU X H, LIU Z, ZHANG Y, et al. Event-triggered adaptive fuzzy tracking control for uncertain nonlinear systems preceded by unknown Prandtl–Ishlinskii hysteresis[J] . IEEE Transactions on Cybernetics, 2021, 51(6): 2979 − 2992. doi: 10.1109/TCYB.2019.2949022 [8] 王贞艳, 贾高欣. 压电陶瓷作动器非对称迟滞建模与内模控制[J] . 光学精密工程, 2018, 26(10): 2484 − 2492. [9] 张东岳, 王伟国, 张振东, 等. 压电偏摆台的复合控制[J] . 压电与声光, 2017, 39(1): 40 − 43. [10] APHALE S S, FLEMING A J, MOHEIMANI S O R. Integral resonant control of collocated smart structures[J] . Smart Materials and Structures, 2007, 16(2): 439 − 446. doi: 10.1088/0964-1726/16/2/023 [11] LING J, FENG Z, KANG X, et al. Bandwidth enhancement in damping control for piezoelectric nanopositioning stages with load uncertainty: design and implementation[J] . Journal of Vibration and Control, 2021, 27(11/12): 1382 − 1394. [12] SAN-MILLAN A, RUSSELL D, FELIU V, et al. A modified positive velocity and position feedback scheme with delay compensation for improved nanopositioning performance[J] . Smart Materials and Structures, 2015, 24(7): 075021. doi: 10.1088/0964-1726/24/7/075021 [13] EIELSEN A A, VAGIA M, GRAVDAHL J T, et al. Damping and tracking control schemes for nanopositioning[J] . IEEE/ASME Transactions on Mechatronics, 2014, 19(2): 432 − 444. doi: 10.1109/TMECH.2013.2242482 -

 下载:
下载:

 点击查看大图
点击查看大图
图(11) / 表(2)
计量
- 文章访问数: 531
- HTML全文浏览量: 282
- PDF下载量: 125
- 被引次数: 0
