

Traffic sign detection based on YOLOv8-s and BiFPN fusion
-
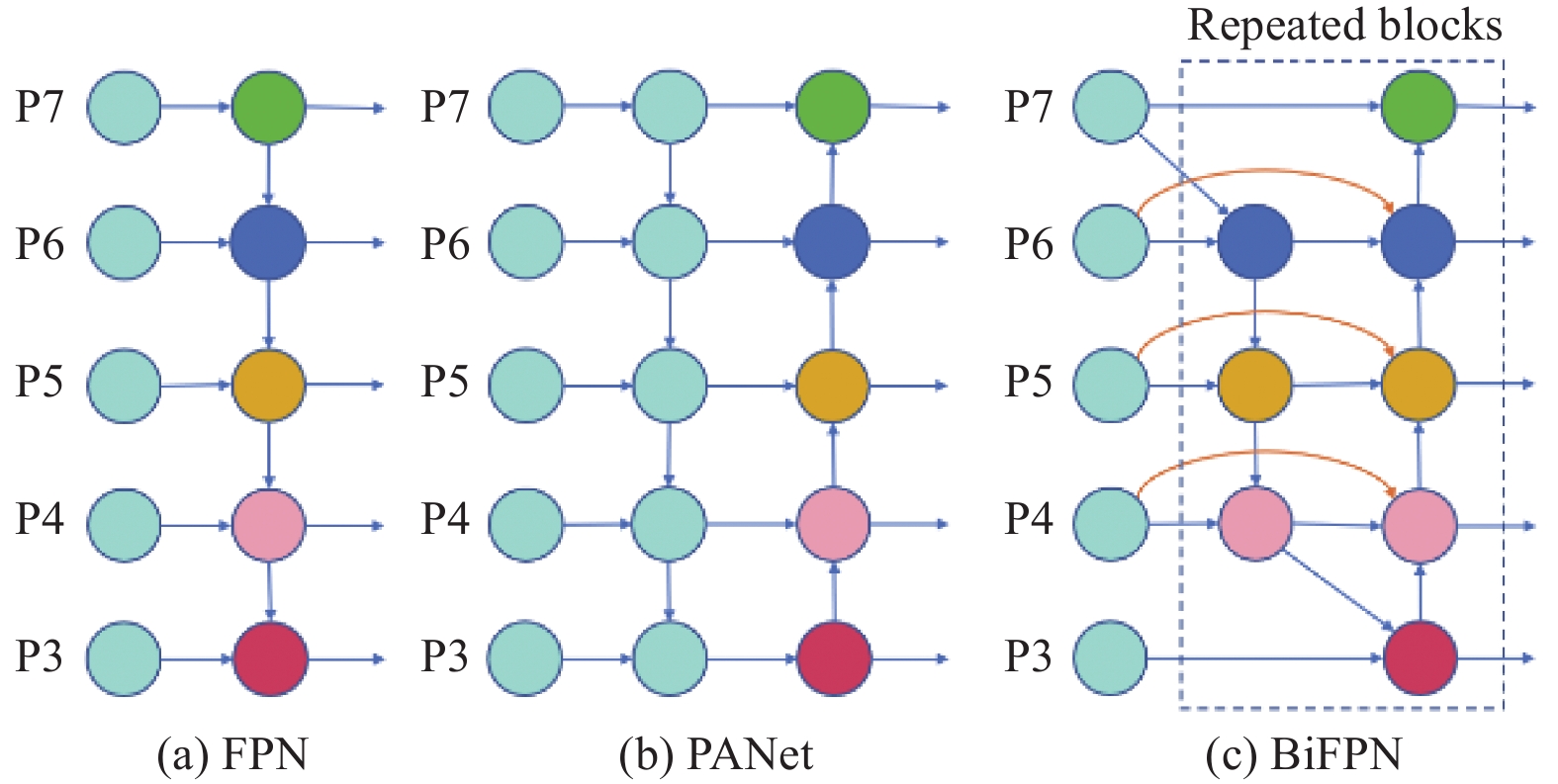
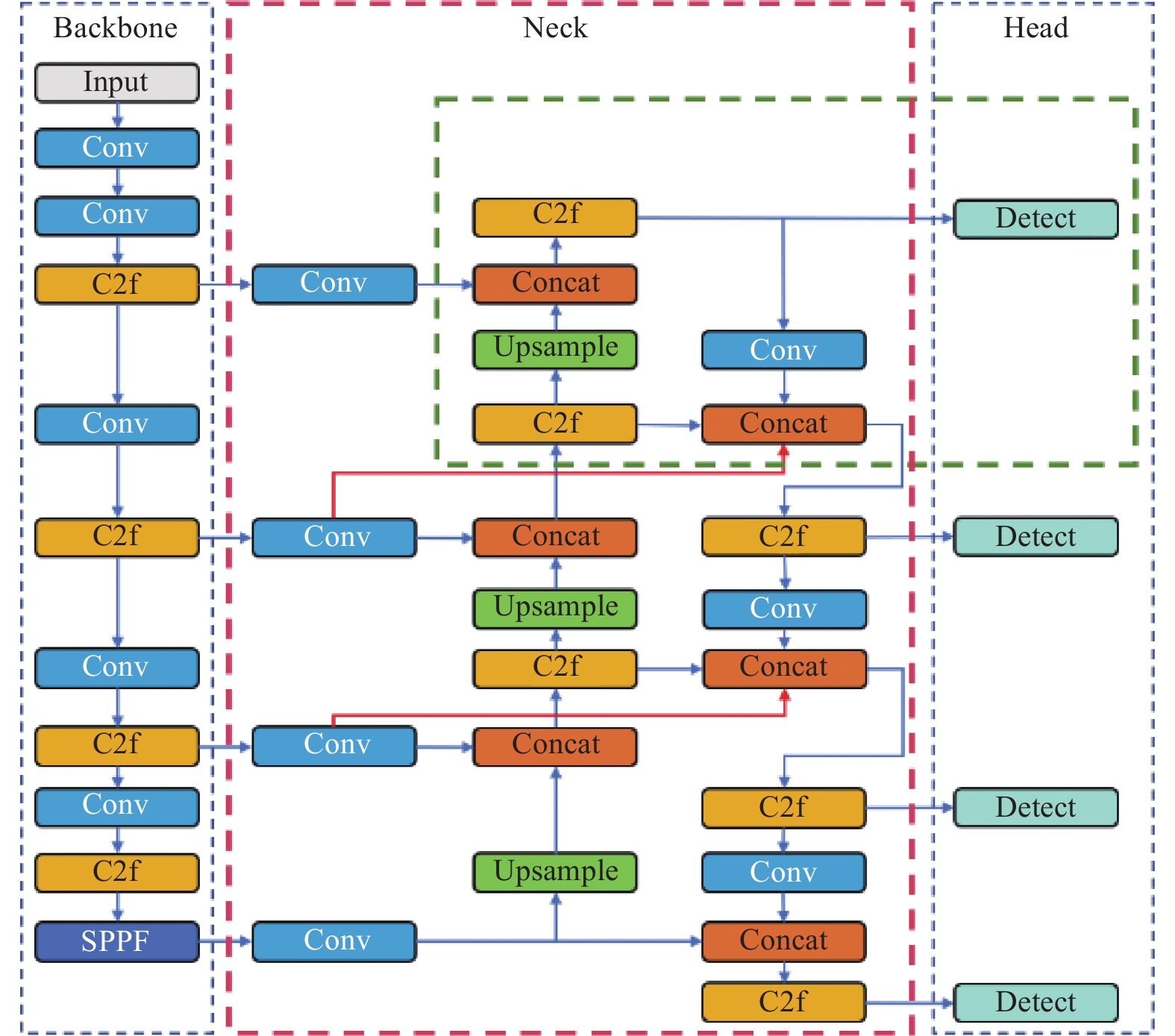
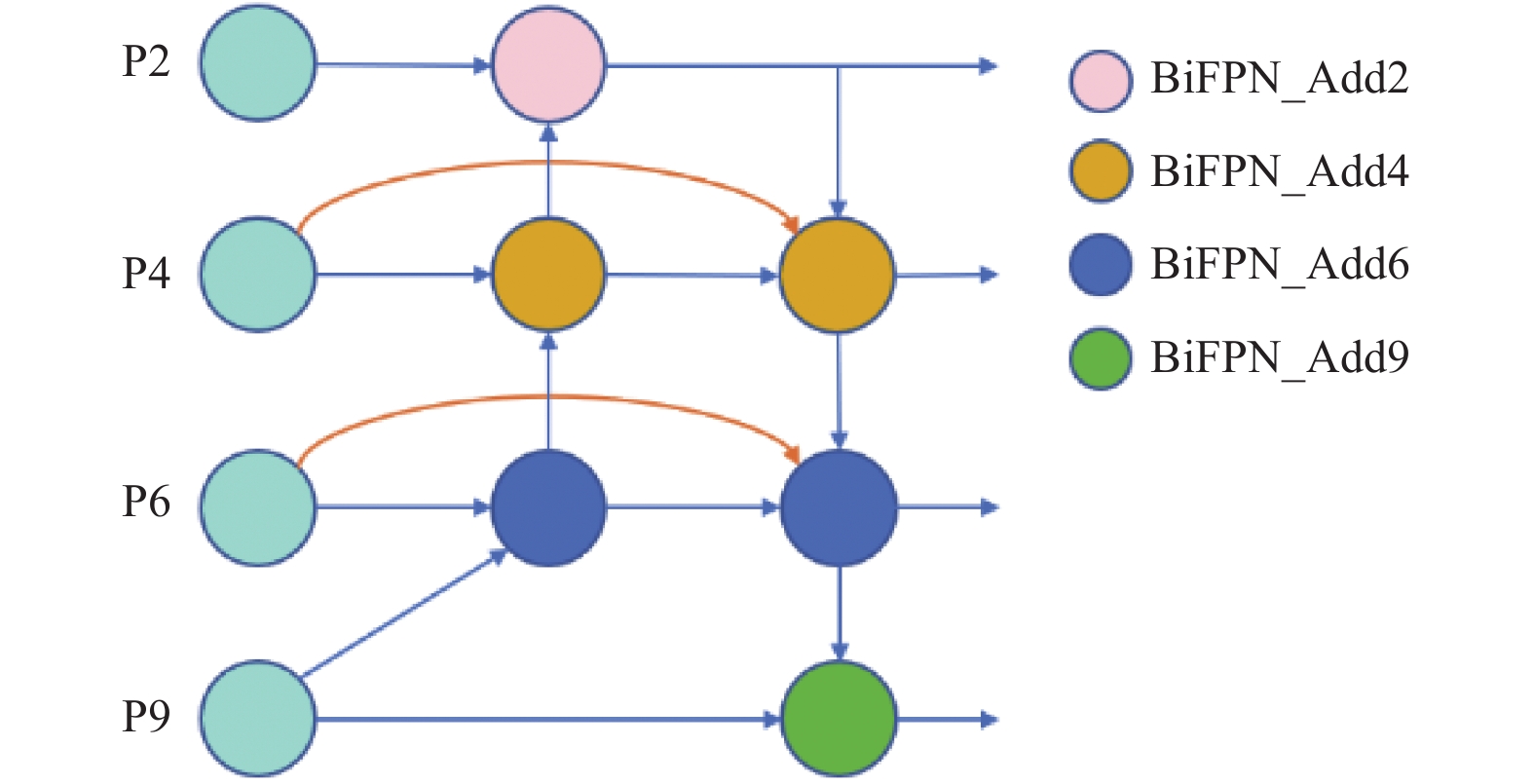
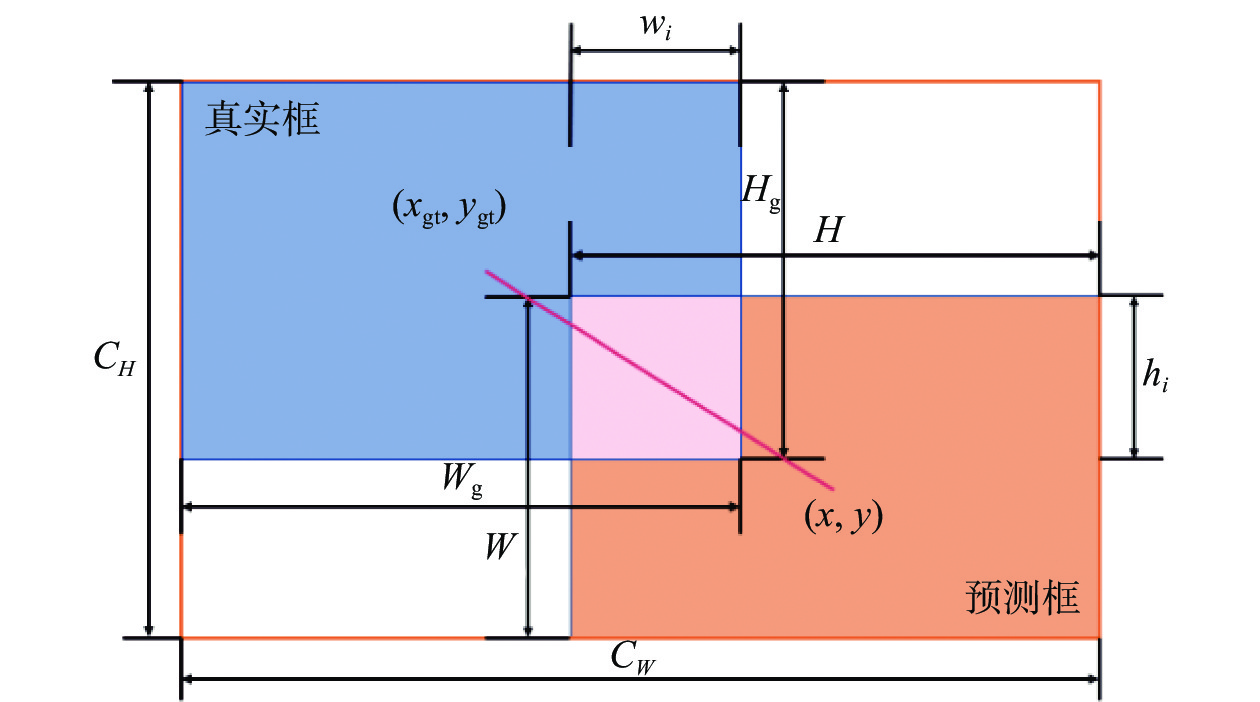
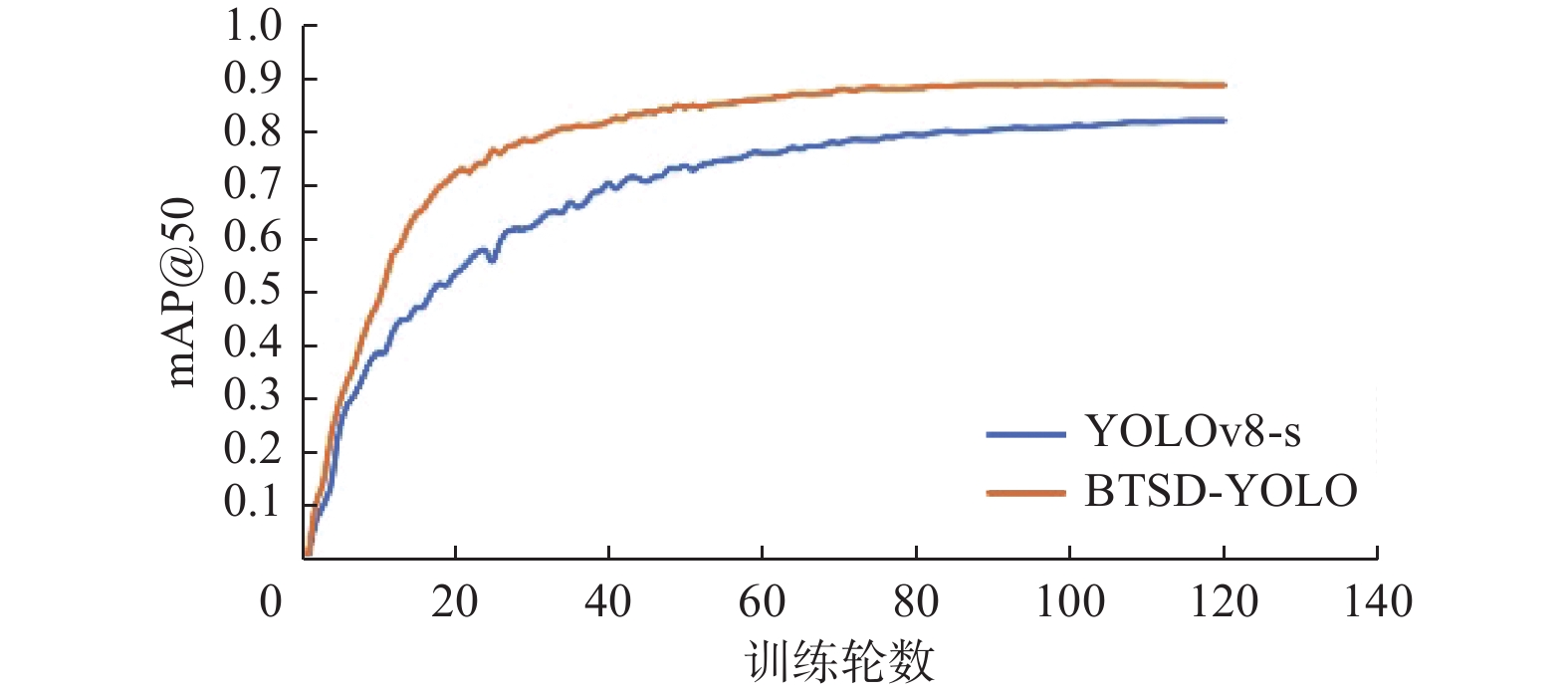
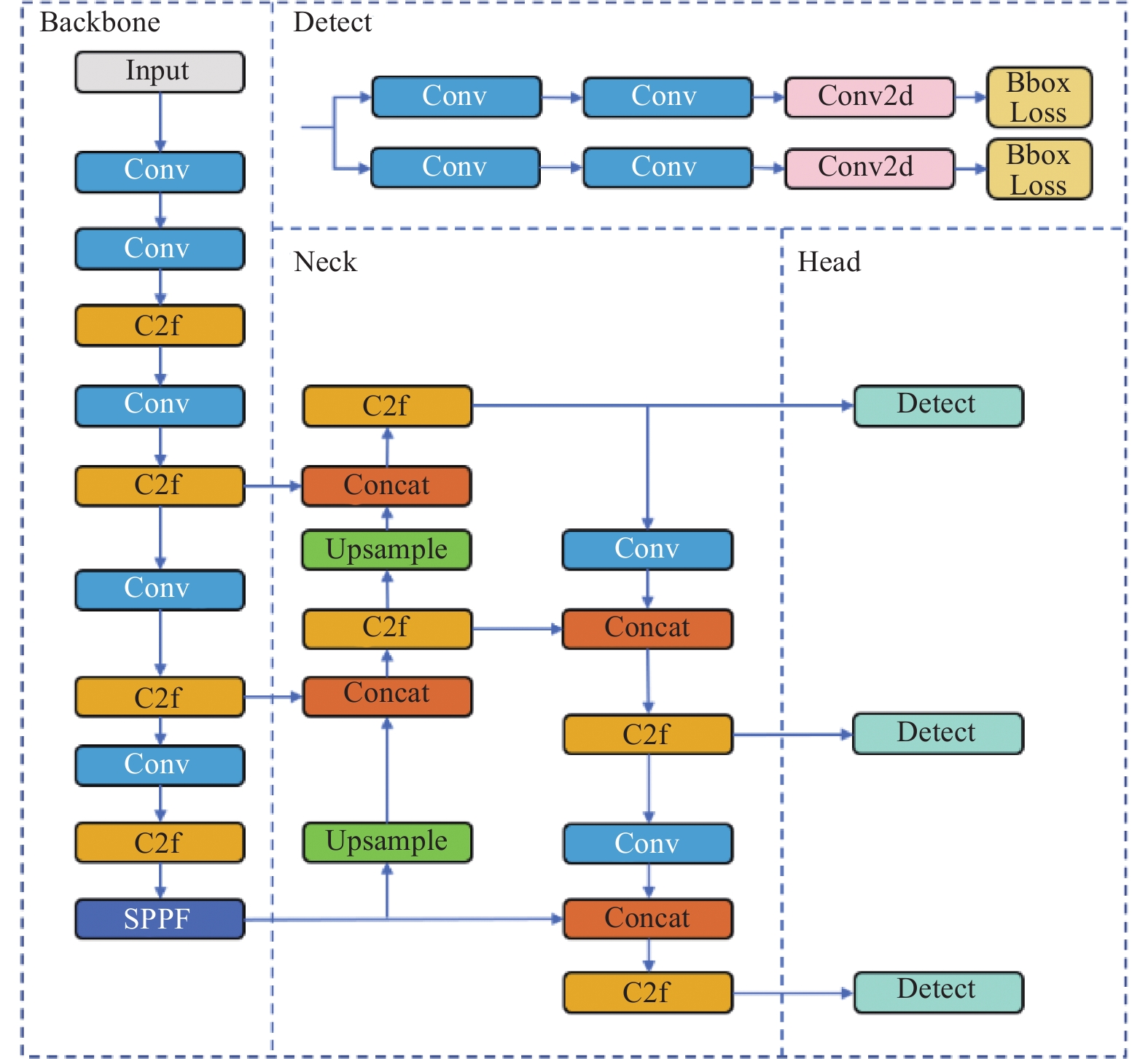
摘要: 交通标志检测是辅助驾驶系统中的关键环节,对提升驾驶安全性和交通效率具有意义。针对交通标志尺寸细微、种类繁多以及复杂背景干扰等挑战,提出一种基于改进YOLOv8-s的交通标志检测算法—BTSD-YOLO。通过集成BiFPN多层级结构,提升模型对多尺度特征融合能力;添加小目标检测层,增强小尺寸目标检测能力;使用WIoU_v3损失函数,减小低质量示例产生的有害梯度。研究表明:本算法对小目标检测能力显著增强,同时优化了多尺度信息的融合机制,有效降低误报和漏报率。与原始YOLOv8-s算法相比,改进算法在COCO精度评价指标mAP@50指标提升6.9%,mAP@50:95指标提升6.0%,充分验证了改进算法的有效性。Abstract: Traffic sign detection plays a crucial role in driver assistance system, contributing significantly to driving safety and traffic efficiency. To address the challenges posed by the small size, wide variety and complex background interference of traffic signs, a traffic sign detection algorithm based on improved YOLOv8-s, named BTSD-YOLO, was proposed. By integrating the multi-level structure of the BiFPN, the multi-scale feature fusion capability of the model was enhanced. A small object detection layer was added to strengthen the detection capability for small-sized targets. The WIoU_v3 loss function was adopted to reduce harmful gradients generated by low-quality examples. The results indicate that the proposed algorithm can significantly enhance detection ability of small targets, and optimize the fusion mechanism of multi-scale information, effectively reducing false positive and false negative rates. Compared with the original YOLOv8-s algorithm, the improved algorithm achieves a 6.9% increase on the COCO accuracy evaluation index mAP@50 index, and a 6.0% increase on the mAP@50:95 metric, fully validating the effectiveness of the proposed improvement.
-
Key words:
- traffic sign detection /
- YOLOv8-s /
- multi-scale feature fusion module /
- loss function
-
表 1 消融实验结果
Table 1. Results of ablation experiments
方法 P/% R/% mAP@50/% mAP@50:95/% F1/% FPS/(帧·s−1) YOLOv8-s(原CIoU) 80.1 74.1 82.2 63.3 80.0 51.2 YOLOv8-s_G(GIoU) 79.5 71.3 80.8 61.8 75.2 50.9 YOLOv8-s_D(DIoU) 81.5 71.6 81.7 62.7 76.2 51.1 YOLOv8-s_E(EIoU) 82.2 74.3 82.4 63.5 78.1 51.2 YOLOv8-s_W(WIoU_v3) 84.5 74.7 82.6 63.5 79.3 51.4 YOLOv8-s_B 84.8 74.7 83.8 64.5 79.4 50.2 YOLOv8-s_STS 88.1 79.1 87.8 68.0 83.4 49.9 YOLOv8-s_B_STS 88.0 81.2 88.7 69.0 84.5 49.3 BTSD-YOLO 89.3 82.8 89.1 69.3 85.9 49.3  下载: 导出CSV
下载: 导出CSV
表 2 主流目标检测算法精度对比表
Table 2. Comparison table of accuracy of mainstream object detection algorithms
模型 P/% R/% mAP@50/% mAP@50:95/% F1/% FPS/(帧·s−1) YOLOv3-s 77.5 72.6 76.4 55.9 75.0 26.7 YOLOv4-tiny 74.5 70.5 72.2 54.3 72.4 33.1 YOLOv5-s 82.1 77.3 80.5 59.6 79.6 37.8 YOLOX-s 83.2 79.3 81.8 61.3 81.2 35.2 YOLOv7-tiny 85.7 80.1 81.5 60.9 82.8 78.4 YOLOv8-s 84.7 74.1 82.2 63.3 79.0 51.2 CA-BiFPN[15] — — 83.9 62.3 — — STS-YOLO[16] 88.8 82.3 87.7 — 85.4 55.7 BTSD-YOLO 89.3 82.8 89.1 69.3 85.9 49.3
下载: 导出CSV
-
[1] 李维刚, 杨潮, 蒋林, 等. 基于改进YOLOv4算法的室内场景目标检测[J] . 激光与光电子学进展, 2022, 59(18): 1815003. doi: 10.3788/LOP202259.1815003 [2] AGRAWAL P, GIRSHICK R, MALIK J. Analyzing the performance of multilayer neural networks for object recognition[C] //Proceedings of the 13th European Conference on Computer Vision. Zurich: Springer, 2014: 329 − 344. [3] GIRSHICK R. Fast R-CNN[C] //Proceedings of 2015 IEEE International Conference on Computer Vision. Santiago: IEEE, 2015: 1440 − 1448. [4] REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J] . IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137 − 1149. doi: 10.1109/TPAMI.2016.2577031 [5] REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C] //Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 779 − 788. [6] LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot MultiBox detector[C] //Proceedings of the 14th European Conference on Computer Vision. Amsterdam: Springer, 2016: 21 − 37. [7] WAN J X, DING W, ZHU H, et al. An efficient small traffic sign detection method based on YOLOv3[J] . Journal of Signal Processing Systems, 2021, 93(8): 899 − 911. doi: 10.1007/s11265-020-01614-2 [8] ZHANG K, HOU J, LIU M Y, et al. Traffic sign recognition based on improved convolutional networks[J] . International Journal of Wireless and Mobile Computing, 2021, 21(3): 274 − 284. doi: 10.1504/IJWMC.2021.120910 [9] WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[C] //Proceedings of 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver: IEEE, 2023: 7464 − 7475. [10] LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C] //Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 936 − 944. [11] SONG G L, LIU Y, WANG X G. Revisiting the sibling head in object detector[C] //Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Seattle: IEEE, 2020: 11560 − 11569. [12] TAN M X, PANG R M, LE Q V. EfficientDet: scalable and efficient object detection[C] //Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Seattle: IEEE, 2020: 10778 − 10787. [13] TONG Z J, CHEN Y H, XU Z W, et al. Wise-IoU: bounding box regression loss with dynamic focusing mechanism[J] . arXiv preprint arXiv:2301.10051, 2023. [14] LIU S, QI L, QIN H F, et al. Path aggregation network for instance segmentation[C] //Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City: IEEE, 2018: 8759 − 8768. [15] 郎斌柯, 吕斌, 吴建清, 等. 基于CA-BIFPN的交通标志检测模型[J] . 深圳大学学报(理工版), 2023, 40(3): 335 − 343. doi: 10.3724/SP.J.1249.2023.03335 [16] 井方科, 任红格, 李松. 基于多尺度特征融合的小目标交通标志检测[J] . 激光与光电子学进展, 2024, 61(12): 1237002. [17] 刘凯, 罗素云. 基于改进YOLOX-S的交通标志识别[J] . 电子测量技术, 2023, 46(1): 112 − 119. doi: 10.19651/j.cnki.emt.2210357 -

 下载:
下载:


 点击查看大图
点击查看大图
图(7) / 表(2)
计量
- 文章访问数: 254
- HTML全文浏览量: 148
- PDF下载量: 94
- 被引次数: 0
