

Design and analysis of a novel electromagnetically driven 6-DOF compliant mechanism for micro-positioning
-
摘要: 针对当前六自由度柔性机构行程小、累积误差大等缺点,设计一种面向电磁驱动微纳米定位的新型六自由度并联柔性机构。对新型六自由度柔性定位机构的组成构件及结构特点进行运动学分析,建立并推导出机构的运动学模型。利用柔性机构中柔性单元的受力与变形特征以及并联机构的几何特征,使用柔度矩阵法建立六自由度柔性机构的静力学柔度解析模型。通过有限元软件对解析模型进行实验验证,研究结果可为多自由度微纳米定位平台的设计和应用提供参考。Abstract: To address the shortcomings of current six-degree-of-freedom (6-DOF) compliant mechanisms, such as limited travel range and large cumulative errors, a novel 6-DOF parallel compliant mechanism for electromagnetically driven micro-nano positioning was designed. Kinematic analysis was conducted on the components and structural characteristics of the new 6-DOF compliant positioning mechanism, and a kinematic model was established and derived. Furthermore, based on the force-deformation characteristics of the compliant units and the geometric characteristics of the parallel mechanism, a static compliance analytical model of the 6-DOF compliant mechanism was established using the compliance matrix method. The analytical model was verified through finite element software. The research results can provide a reference for the design and application of multi-degree-of-freedom micro-nano positioning platforms.
-
Key words:
- six-degree-freedom (6-DOF) /
- compliant mechanism /
- parallel mechanism /
- kinematics /
- compliance matrix
-
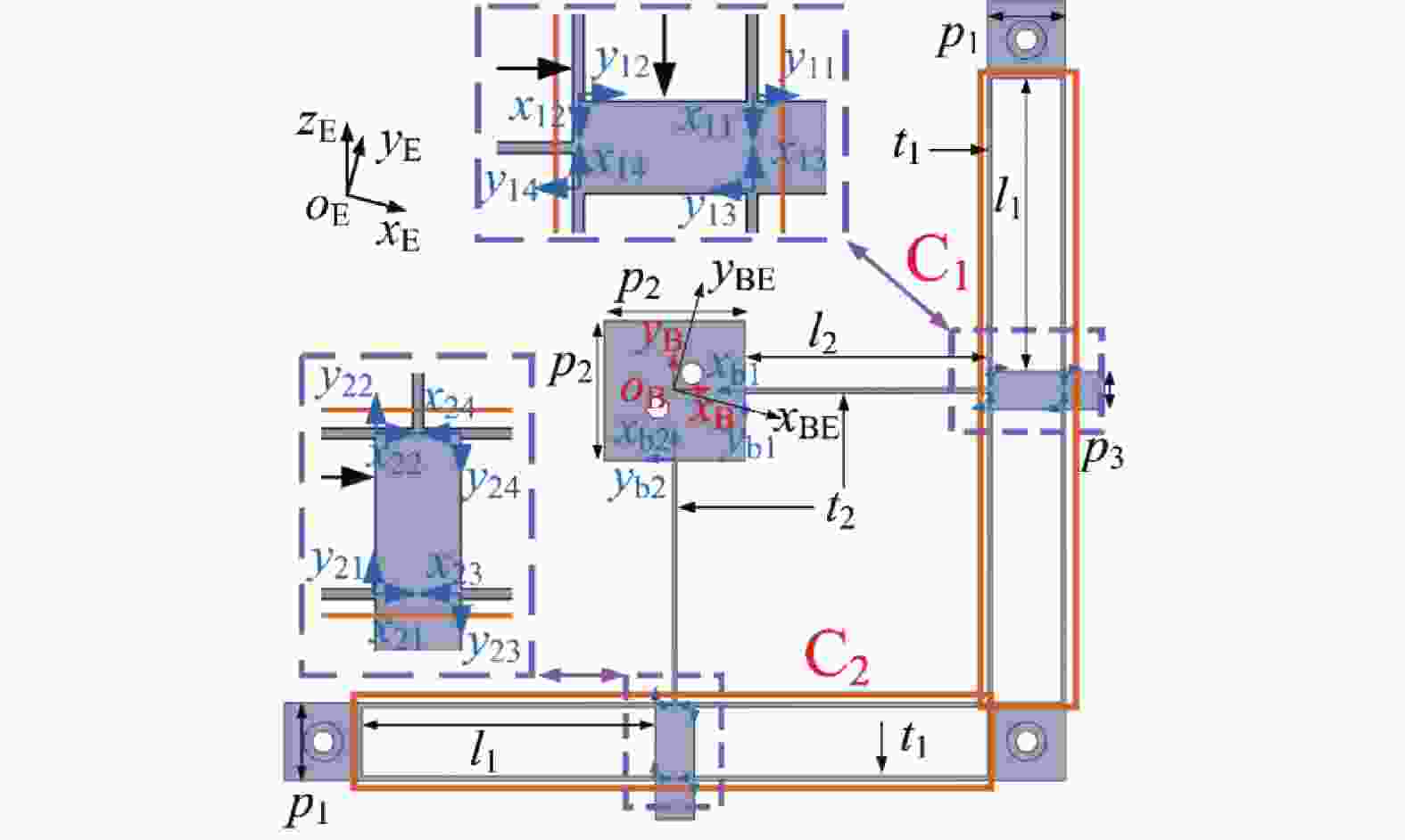
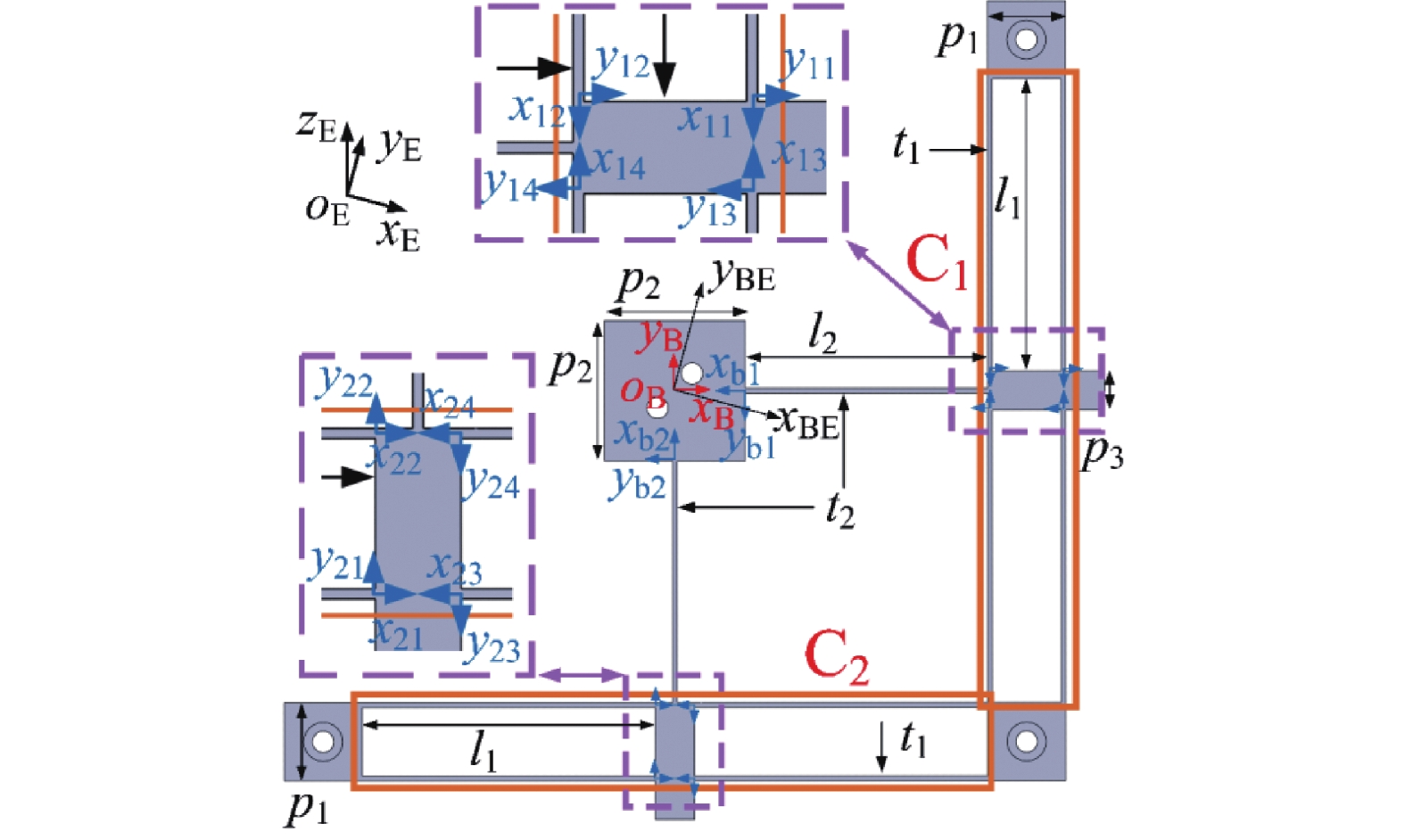
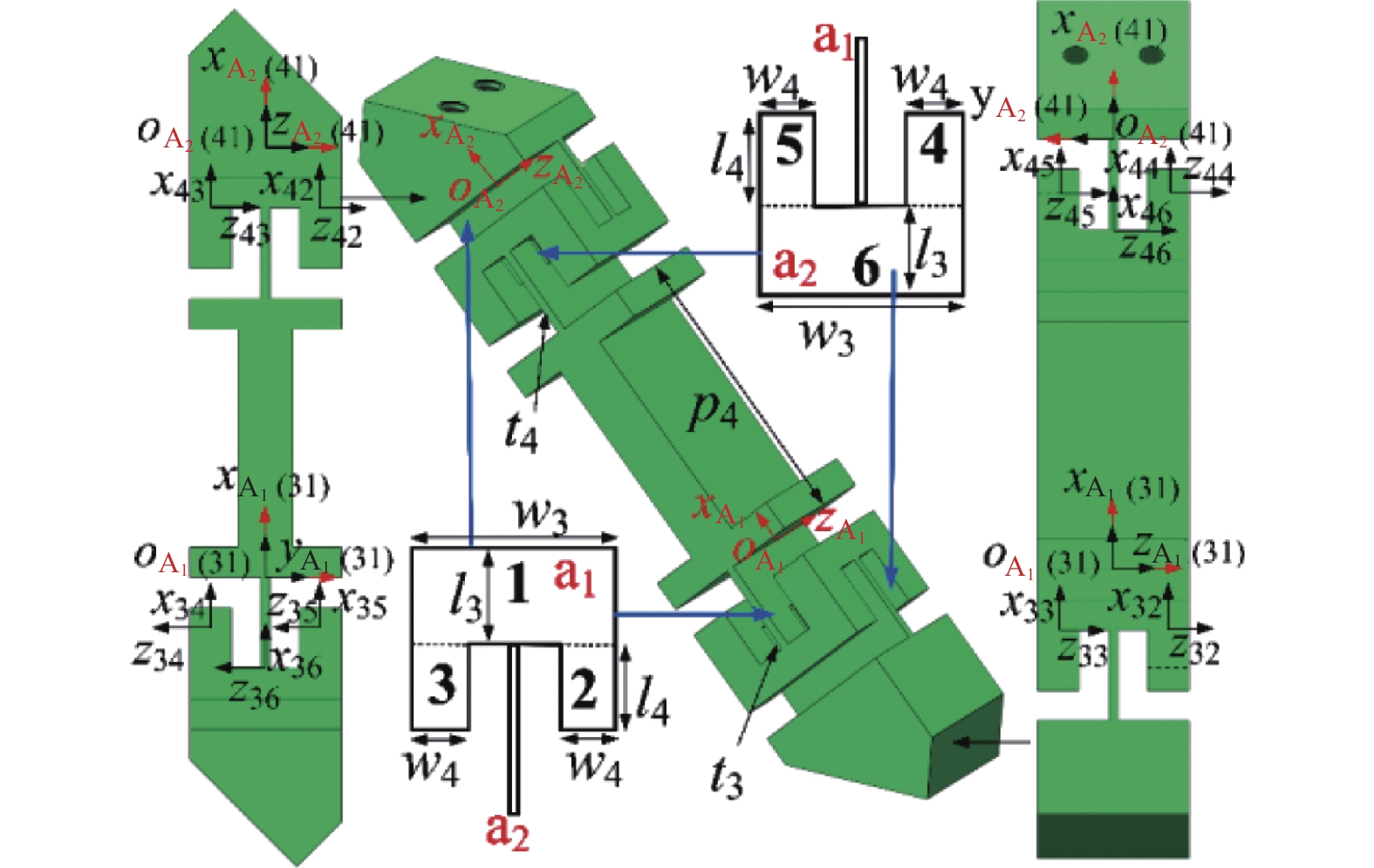
图 5 二自由度平动柔性并联模块坐标示意图
Figure 5. Coordinate diagram of 2-DOF translational compliant parallel module
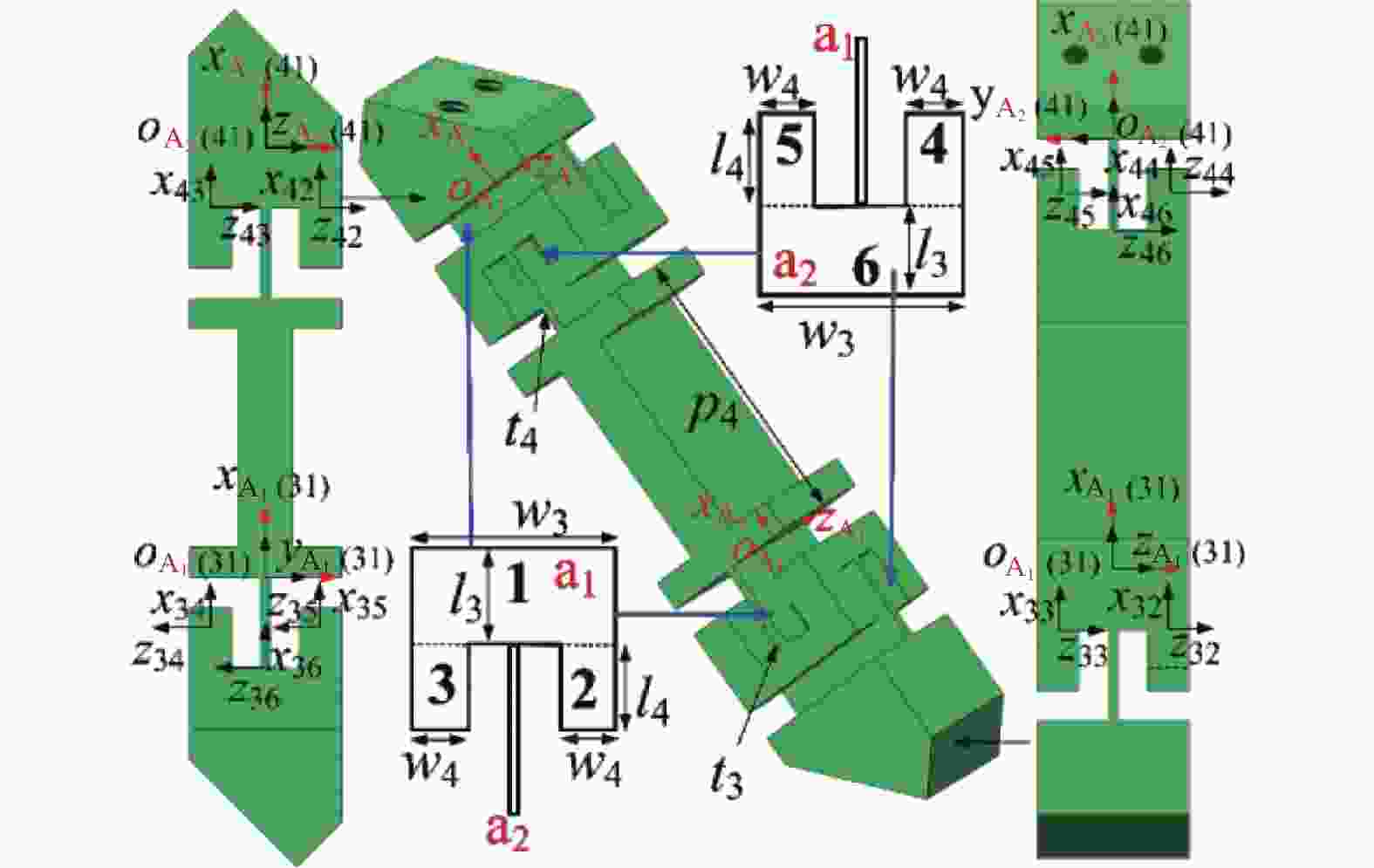
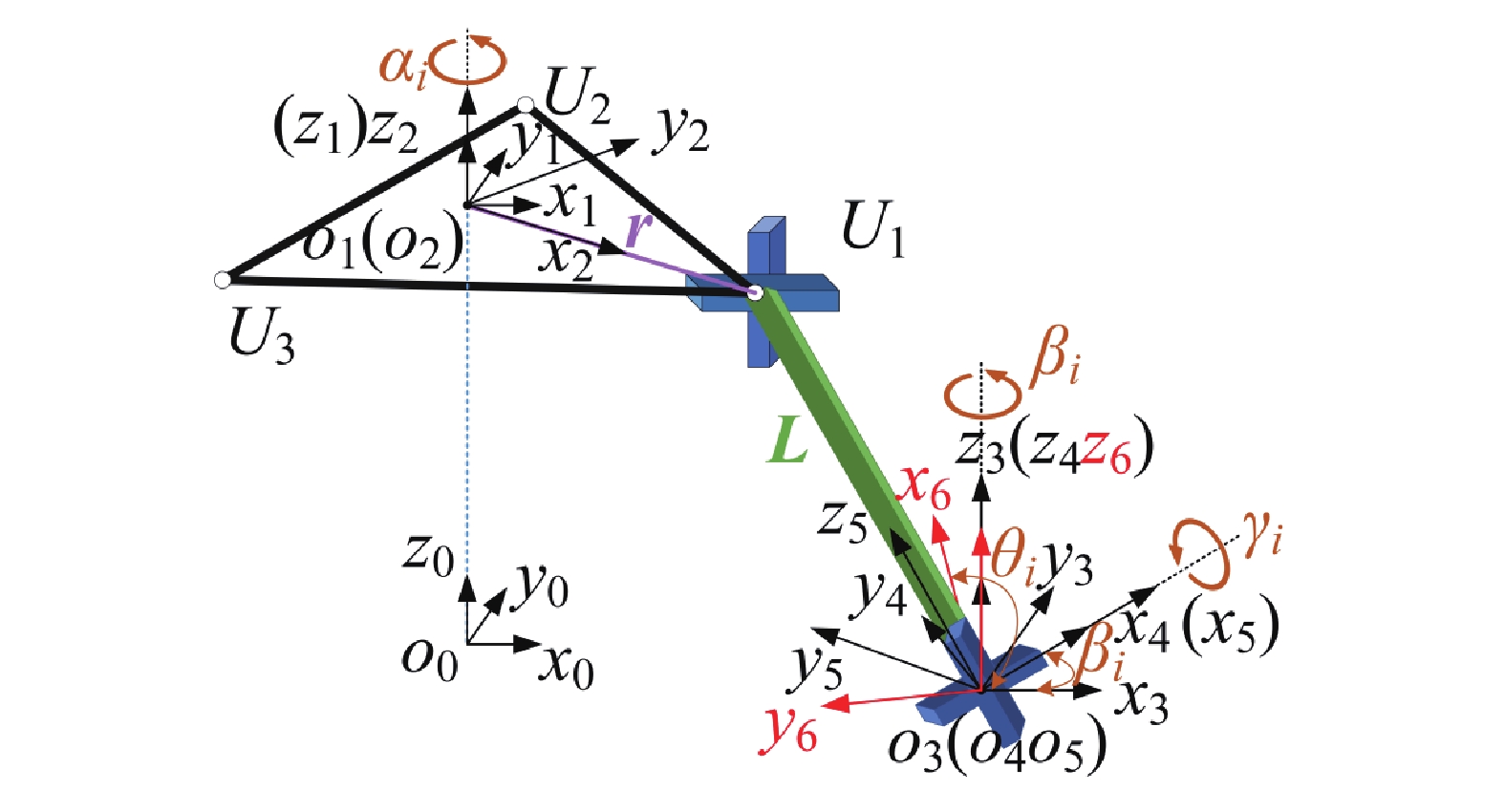
图 6 双柔性虎克铰的连杆坐标示意图
Figure 6. Coordinate schematic diagram of dual compliant Hooke joint linkage
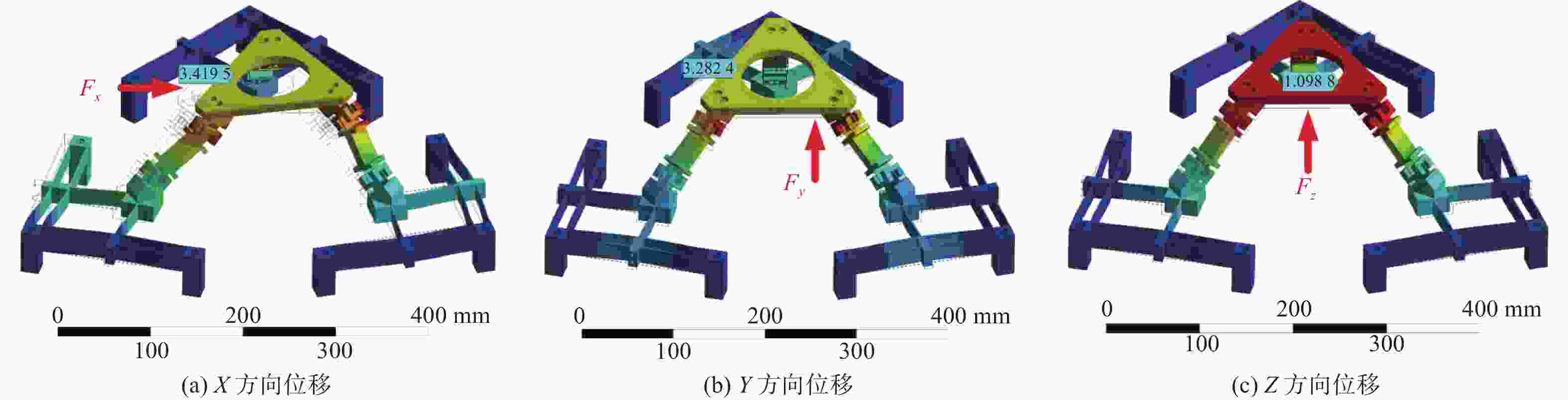
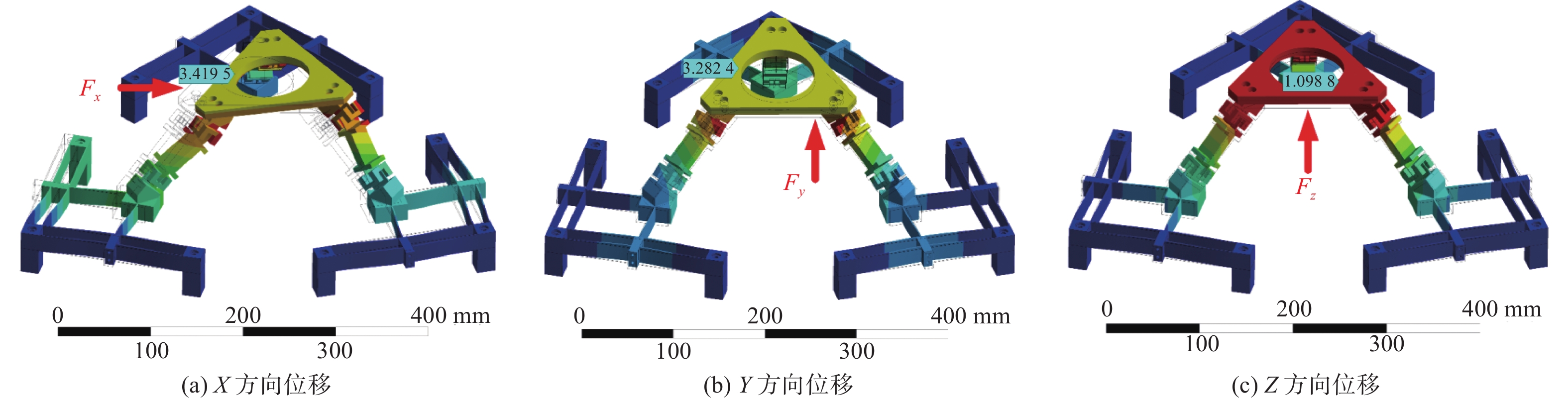
图 7 平动自由度方向上位移云图
Figure 7. Displacement cloud diagram in direction of linear degrees of freedom
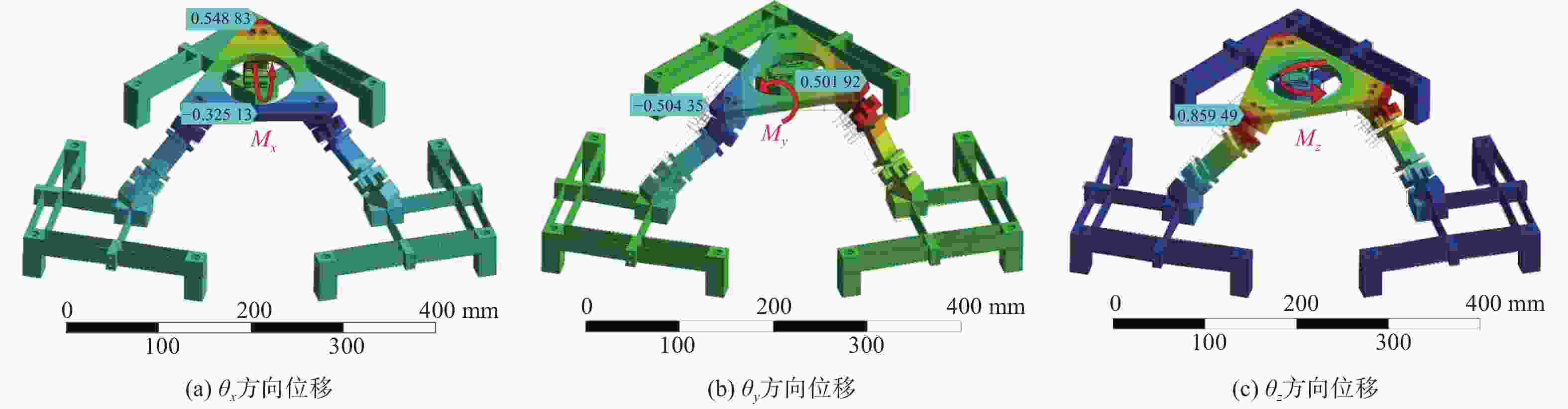
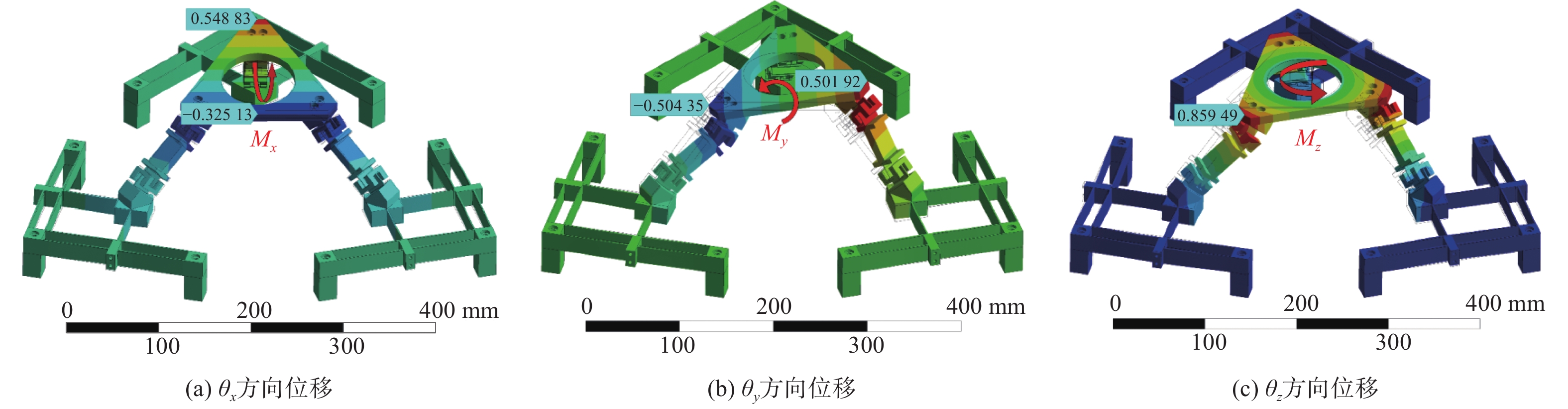
图 8 转动自由度方向上位移云图
Figure 8. Displacement cloud diagram in the direction of rotational degrees of freedom
表 1 六自由度柔性机构的尺寸参数
Table 1. Dimensional parameters of 6-DOF platform
参数 数值/mm 参数 数值/mm l1 75 w4 7 l2 62 t1/t2 1.2 l3 10 t3/t4 1 l4 5 p1 20 w1 20 p2 36 w2 20 p3 10 w3 25 p4 46  下载: 导出CSV
下载: 导出CSV
表 2 理论建模与有限元的输出柔度对比
Table 2. Comparison of theoretical modeling and FEA output compliance
输出柔度 有限元模型 理论模型 相对误差/% X/(mm·N−1) 0.034 195 0.032 349 −5.40 Y/(mm·N−1) 0.032 824 0.032 349 −1.45 Z/(mm·N−1) 0.010 988 0.010 344 −5.86 θx/(m·rad) 5.936 × 10−3 5.876 × 10−3 −1.01 θy/(m·rad) 5.919 × 10−3 5.876 × 10−3 −0.73 θz/(m·rad) 9.304 × 10−3 10.50 × 10−3 12.85
下载: 导出CSV
-
[1] LEE C, LEE J W, RYU S G, et al. Optimum design of a large area, flexure based XYθ mask alignment stage for a 12-inch wafer using grey relation analysis[J] . Robotics and Computer-Integrated Manufacturing, 2019, 58: 109 − 119. doi: 10.1016/j.rcim.2019.02.005 [2] XIAO R J, XU M L, SHAO S B, et al. Design and wide-bandwidth control of large aperture fast steering mirror with integrated-sensing unit[J] . Mechanical Systems and Signal Processing, 2019, 126: 211 − 226. doi: 10.1016/j.ymssp.2019.02.028 [3] TEO T J, YANG G L, CHEN I M. A large deflection and high payload flexure-based parallel manipulator for UV nanoimprint lithography: part I. Modeling and analyses[J] . Precision Engineering, 2014, 38(4): 861 − 871. doi: 10.1016/j.precisioneng.2014.05.003 [4] ALIPOUR A, COSKUN M B, MOHEIMANI S O R. A high bandwidth microelectromechanical system-based nanopositioner for scanning tunneling microscopy[J] . Review of Scientific Instruments, 2019, 90(7): 073706. doi: 10.1063/1.5109900 [5] WANG G W, XU Q S. Design and precision position/force control of a piezo-driven microinjection system[J] . IEEE/ASME Transactions on Mechatronics, 2017, 22(4): 1744 − 1754. doi: 10.1109/TMECH.2017.2698139 [6] BROUWER D M, DE JONG B R, SOEMERS H M J R. Design and modeling of a six DOFs MEMS-based precision manipulator[J] . Precision Engineering, 2010, 34(2): 307 − 319. doi: 10.1016/j.precisioneng.2009.08.001 [7] WOO S, GWEON D G. Design and optimization of long stroke planar motion maglev stage using copper strip array[J] . International Journal of Precision Engineering and Manufacturing, 2015, 16(3): 479 − 485. doi: 10.1007/s12541-015-0065-6 [8] 陈应舒, 朱淳逸. 椭圆弧型柔性球铰的柔度矩阵计算与分析[J] . 机械设计与研究, 2015, 31(5): 51 − 54,61. doi: 10.13952/j.cnki.jofmdr.2015.0183 [9] TIAN Y, SHIRINZADEH B, ZHANG D. Design and dynamics of a 3-DOF flexure-based parallel mechanism for micro/nano manipulation[J] . Microelectronic Engineering, 2010, 87(2): 230 − 241. doi: 10.1016/j.mee.2009.08.001 [10] LI H C, TANG H, LI J D, et al. Design, fabrication, and testing of a 3-DOF piezo fast tool servo for microstructure machining[J] . Precision Engineering, 2021, 72: 756 − 768. doi: 10.1016/j.precisioneng.2021.07.015 [11] YANG Z D, LEE R, HOPKINS J B. Hexblade positioner: a fast large-range six-axis motion stage[J] . Precision Engineering, 2022, 76: 199 − 207. doi: 10.1016/j.precisioneng.2022.03.018 [12] XU Q S. Design and Development of a compact flexure-based XY precision positioning system with centimeter range[J] . IEEE Transactions on Industrial Electronics, 2014, 61(2): 893 − 903. doi: 10.1109/TIE.2013.2257139 [13] WU L, LIU X, WANG M J, et al. Kinematic analysis of a spatial cable-driven mechanism and its equivalent hybrid mechanism for elliptical trajectory[J] . Machines, 2023, 11(7): 710. doi: 10.3390/machines11070710 [14] WAN Z, HU Y, LIN J C, et al. Design of the control system for a 6-DOF mobile parallel robot with 3 subchains[C] //Proceedings of 2010 IEEE International Conference on Mechatronics and Automation. Xi’an: IEEE, 2010: 446 − 451. [15] 蔡自兴, 谢斌. 机器人学: Robotics[M] . 3版. 北京: 清华大学出版社, 2015: 22. [16] 陈云壮, 赖磊捷, 李朋志, 等. 全簧片式空间大行程并联柔性微定位平台及其轨迹控制[J] . 光学 精密工程, 2023, 31(18): 2675 − 2686. [17] 李政. 二自由度大行程微定位平台设计与运动控制[D] . 天津: 天津大学, 2014. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 146
- HTML全文浏览量: 94
- PDF下载量: 69
- 被引次数: 0
