

Control strategy for AEB in target traversing based on PreScan
-
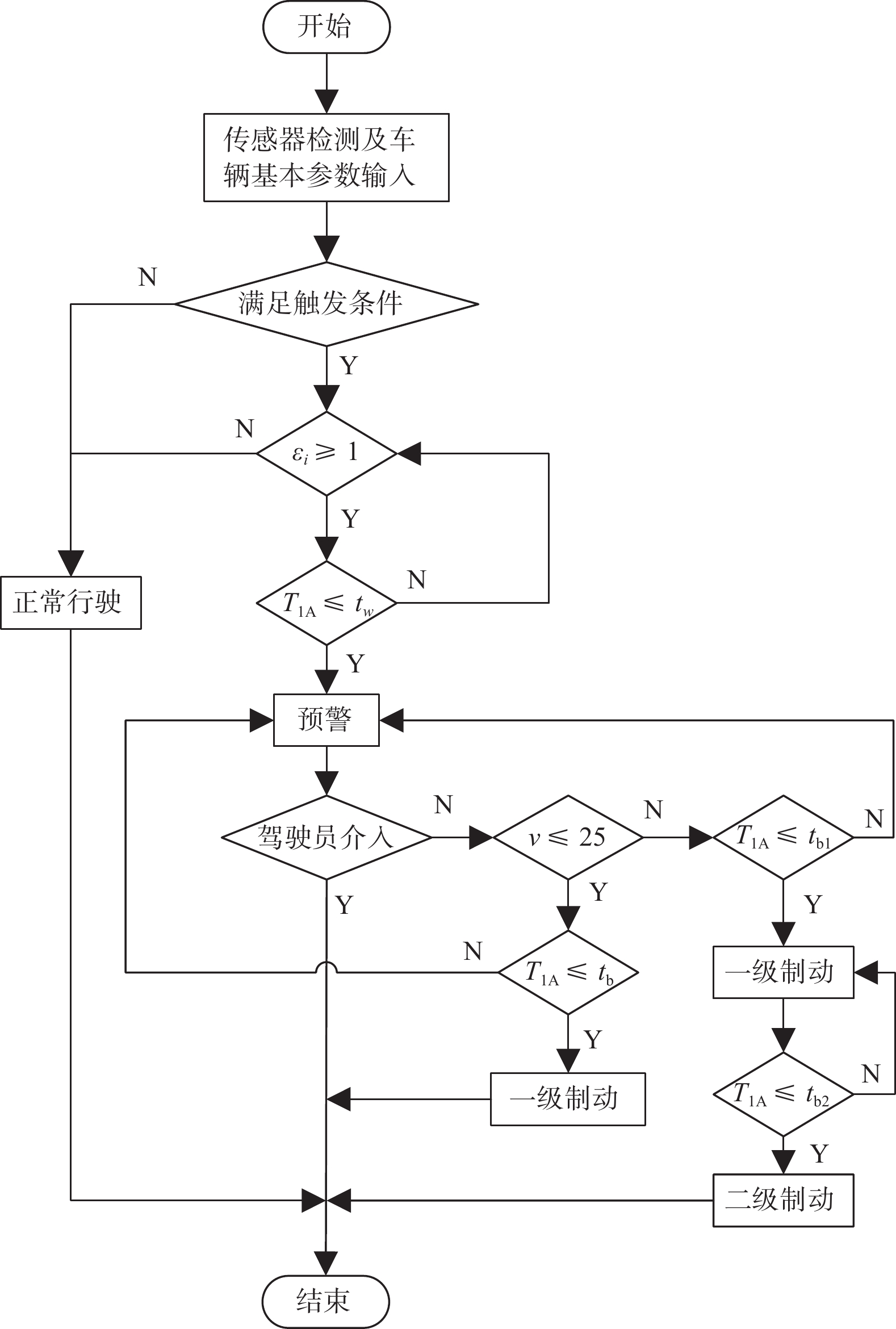
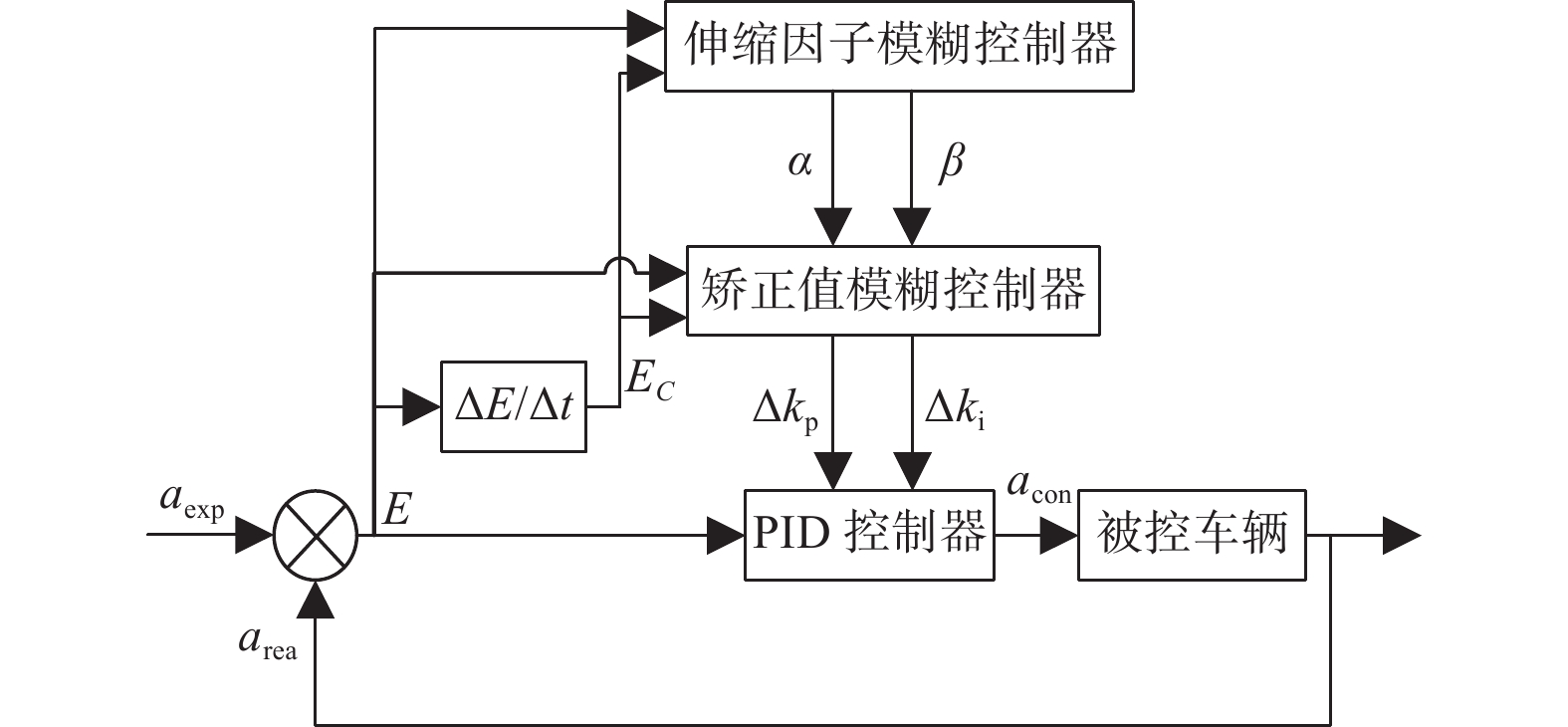
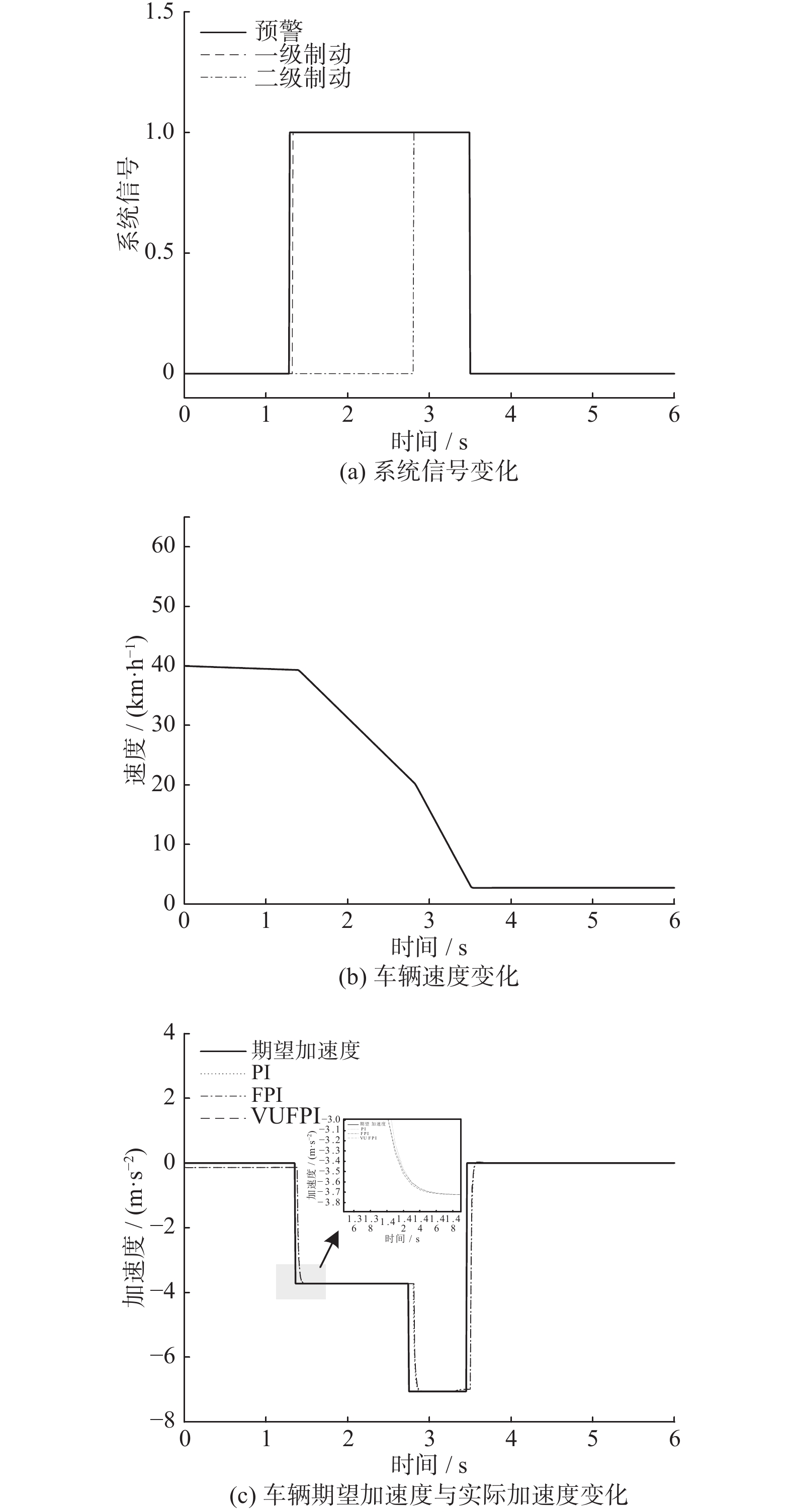
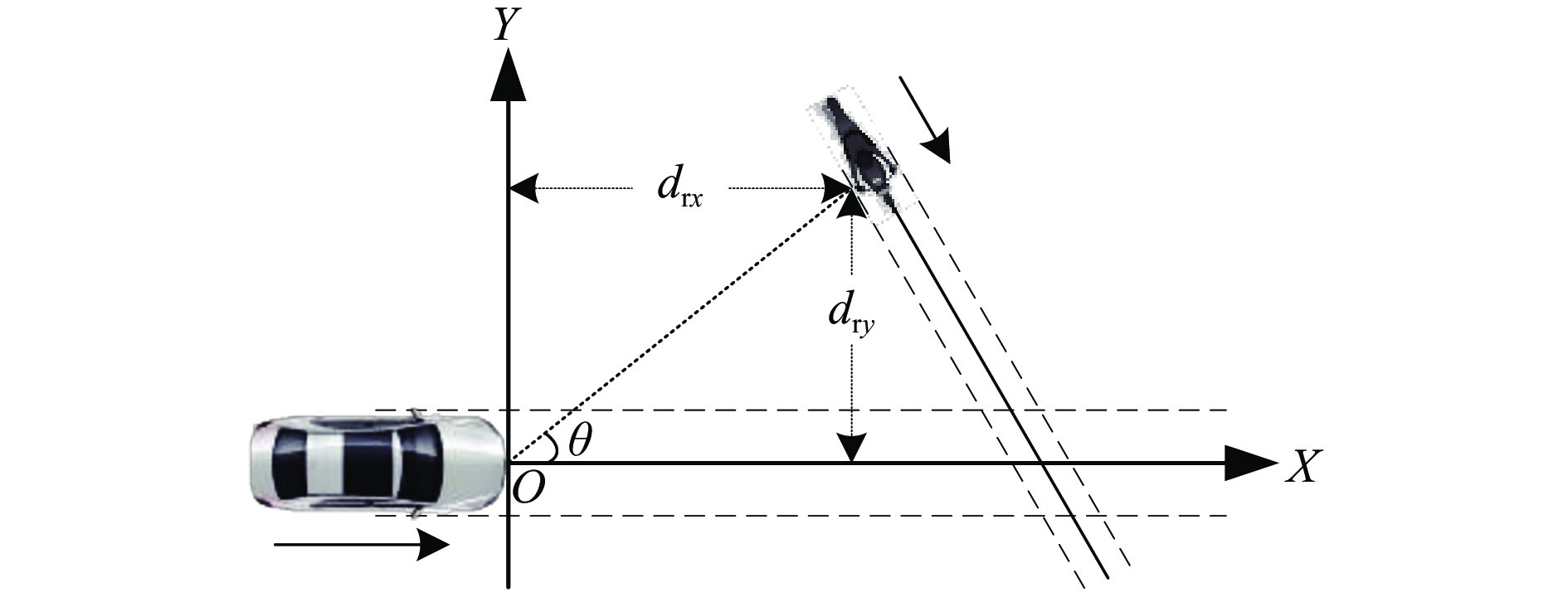
摘要: 针对车辆在直行过程中与穿行目标的运动关系,提出一种自动紧急制动(AEB)控制策略。将目标相对车辆的运动分解为横向和纵向分量,基于碰撞时间(TTC)算法定义危险系数以确立预警判断条件,并设计动态触发宽度和动态TTC阈值,当系统发出预警且驾驶员未介入时,采用分速分级制动策略。基于变论域模糊PI算法构建下层控制器,实现对本车期望加速度的精准跟随。同时,利用PreScan建立车辆逆纵向动力学模型,将其转化为实际操作。通过PreScan与Matlab对该策略进行仿真验证分析,结果显示,在基于C-NCAP的测试场景下,该策略能有效避免碰撞。
-
关键词:
- 自动紧急制动 /
- 碰撞时间 /
- 变论域模糊PI控制器 /
- 目标穿行 /
- PreScan软件
Abstract: Aiming at the motion relationship between the vehicle and the passing target in the straight ahead process, an autonomous emergency braking (AEB) control strategy was proposed. The motion of the target relative to the vehicle was decomposed into lateral and longitudinal components, and the risk coefficient was defined based on the time to collision (TTC) algorithm to establish the early warning judgment conditions, and the dynamic trigger width and dynamic TTC threshold were designed. When the system given an early warning and the driver was not involved, the split speed and graded braking strategy was adopted. The lower controller was constructed based on the variable universe fuzzy PI algorithm to accurately follow the expected acceleration of the vehicle. At the same time, PreScan was used to establish the vehicle reverse longitudinal dynamics model, which was translated into actual operation. Though PreScan and Matlab, the strategy was simulated and verified. The results show that the strategy can effectively avoid collision in the test scenario based on C-NCAP. -
表 1 不同车速下TTC阈值
Table 1. TTC threshold at different vehicle speeds
v/(km·h−1) tb1/s tb2/s dbe/m 10 1.0 0 1.56 20 1.1 0 1.50 30 1.4 0.56 1.46 40 1.6 0.68 1.56 50 1.8 0.80 1.63 60 2.0 0.92 1.60 70 2.2 1.08 1.37 80 2.4 1.30 1.85 90 2.6 1.46 1.66 100 2.8 1.62 1.50 110 3.0 2.07 1.43 120 3.2 2.42 1.64  下载: 导出CSV
下载: 导出CSV
表 2 矫正值模糊规则
Table 2. Correction value fuzzy rule
Δkp/Δki E NB(负大) NM(负中) NS(负小) O(零) PS(正小) PM(正中) PB(正大) EC NB PB/NB PB/NB PB/NM PM/NM PS/NS O/O O/O NM PB/NB PB/NM PM/NM PS/NS O/O O/O NS/O NS PB/NM PB/NM PM/NS PS/O O/O NS/PS NM/PM O PM/NM PM/NS O/O NS/O NS/PS NM/PM NM/PM PS PM/NS PM/NS PS/O O/PS NS/PS NM/PM NB/PB PM PS/O PS/O O/PS NS/PS NM/PM NM/PM NB/PB PB O/O O/O PS/PS NS/PM NM/PM NB/PB NB/PB
下载: 导出CSV
表 3 伸缩因子模糊规则
Table 3. Expansion factor fuzzy rule
α/β E NB NS O PS PB EC NB PB/PB PB/PB O/PB NB/PB NB/PB NS PS/O O/O NS/O NB/O NB/O O O/NB NS/NB NB/NB NS/NB O/NB PS NS/O NB/O NS/O O/O PS/O PB NB/PB NB/PB O/PB PS/PB PB/PB
下载: 导出CSV
表 4 整车和环境主要参数
Table 4. Main parameters of vehicle and environment
参数 符号 值 车辆长度/m l1 5.21 车辆宽度/m w1 2.04 车轮滚动半径/m r 0.34 主减速器传动比 io 5.3 整车质量/kg m 1820 空气阻力系数 CD 0.27 迎风面积/m2 A 2.33 空气密度/(kg·m-3) ρ 1.28 滚动阻力系数 f 0.01
下载: 导出CSV
表 5 仿真参数设置
Table 5. Simulation parameter setting
参数 值 TIS传感器
参数视场角/(°) 80 最大探测距离/m 90 仿真频率/Hz 100 精度/% 2 光束类型 Cone 避撞策略
参数两轮车长度/m 1.8 两轮车宽度/m 0.9 车辆与造成视线遮挡的路边驻车的距离/m 1 两轮车前端到车辆轨迹中心线的垂直距离/m 10
下载: 导出CSV
表 6 完整仿真结果
Table 6. Complete simulation results
车速/
(km·h−1)二轮车速度/
(km·h−1)本研究算法 传统算法 dbe/m db/m 20 15 1.57 4.14 碰撞 40 1.67 10.24 60 1.02 26.69
下载: 导出CSV
-
[1] 何仁, 冯海鹏. 自动紧急制动(AEB)技术的研究与进展[J] . 汽车安全与节能学报, 2019, 10(1): 1 − 15. doi: 10.3969/j.issn.1674-8484.2019.01.001 [2] 吴子祥, 黄合来, 陈吉光, 等. 视线遮挡条件下面向弱势道路使用者的避撞策略研究[J] . 交通信息与安全, 2021, 39(4): 9 − 15, 34. doi: 10.3963/j.jssn.1674-4861.2021.04.002 [3] 李晓阳, 刘树伟. 考虑驾驶员特性的行人避撞策略及仿真验证[J] . 专用汽车, 2022(8): 74 − 78, 82. [4] 胡延平, 王晓静, 徐鹏, 等. 基于PreScan的交叉轨迹工况AEB控制[J] . 机械工程与自动化, 2019(5): 29 − 31. [5] 中国汽车技术研究中心有限公司. 中国新车评价规程(C-NCAP) 2020年度测评结果研究报告[EB/OL] . (2021-03-25)[2024-08-30] . https://www.c-ncap.org.cn/download. [6] 胡远志, 吕章洁, 刘西. 基于PreScan的AEB系统纵向避撞算法及仿真验证[J] . 汽车安全与节能学报, 2017, 8(2): 136 − 142. doi: 10.3969/j.issn.1674-8484.2017.02.004 [7] 韩勇, 袁小宾, 卢明, 等. 汽车与电动两轮车碰撞典型场景下的AEB纵横向触发策略研究[J] . 汽车工程, 2023, 45(3): 501 − 509. [8] 何霞, 张道文, 车瑶栎, 等. 基于行人横穿场景的AEB触发宽度优化研究[J] . 中国安全科学学报, 2020, 30(4): 141 − 146. [9] 徐向阳, 胡文浩, 张友, 等. 车辆与二轮车预碰撞场景分析及其AEB优化[J] . 北京航空航天大学学报, 2023, 49(1): 1 − 9. [10] 尤本隆. 基于Prescan自动紧急制动系统分级控制策略研究[J] . 农业装备与车辆工程, 2022, 60(1): 54 − 59. [11] 王陆林, 刘贵如. 汽车制动距离估算模型和安全车距控制算法[J] . 农业装备与车辆工程, 2019, 57(12): 23 − 28. [12] 杜峰, 程剑锋, 齐蕾, 等. 基于驾驶行为特性的AEB系统控制策略研究[J] . 河南科技大学学报(自然科学版), 2023, 44(6): 16 − 25. [13] 杨贺博, 张小俊, 罗耿耿, 等. 基于动态碰撞时间的自动紧急制动策略设计[J] . 汽车技术, 2024(2): 17 − 24. [14] ZHANG Y Z, ANTONSSON E K, GROTE K. A new threat assessment measure for collision avoidance systems[C] //Proceedings of 2006 IEEE Intelligent Transportation Systems Conference. Toronto: IEEE, 2006: 968 − 975. [15] 王晶晶, 郭文博, 张友松, 等. 基于车联网的行人主动避撞策略及仿真验证[J] . 汽车技术, 2022(5): 41 − 49. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 462
- HTML全文浏览量: 274
- PDF下载量: 123
- 被引次数: 0
