

Design of active disturbance rejection controller for quadrotor unmanned aerial vehicle based on equivalent sliding-mode control method
-
摘要: 针对带有扰动及不确定性的四旋翼无人机的稳定性问题,提出一种基于等效滑模控制法的自抗扰控制器. 首先根据机体坐标系和地面坐标系的转化,结合牛顿第二定律和牛顿−欧拉公式,构造无人机的动力学模型. 然后设计拓展状态观测器,用来恢复系统状态及对系统所有扰动和不确定性估计,以实现误差快速收敛和提高估计精度. 基于自抗扰控制器提出等效滑模控制器的概念,将控制输出分成等效控制项和切换鲁棒控制项,再与非奇异终端滑模控制相结合,避免奇异问题. 通过李雅普诺夫稳定性理论证明,设计的自抗扰控制器可以实现系统渐近稳定. 数值仿真例子验证了抗扰动性能和鲁棒性.Abstract: An active disturbance rejection controller (ADRC) based on equivalent sliding-mode control method was proposed to solve the stability problem of quadrotor unmanned aerial vehicle (UAV) with disturbances and uncertainties. According to the transformation of the body coordinate system and ground coordinate system, combined with Newton's second law and Newton-Euler formula, the dynamic model of UAV was constructed. An extended state observer was designed to restore the state of the system and estimate all disturbances and uncertainties of the system, in order to achieve rapid error convergence and improve estimation accuracy. Based on the ADRC, the concept of an equivalent sliding-mode controller was proposed, and the control output was divided into the equivalent control term and the switching robust control term. Combined with the non-singular terminal sliding-mode control, the singular problem was avoided. Through the Lyapunov stability theory, it is proved that the designed ADRC can achieve system asymptotic stability. Finally, the active disturbance rejection performance and robustness were verified by a numerical simulation example.
-

图 2 滑模控制器下的位置跟踪轨迹
Figure 2. Position tracking trajectory under sliding-mode controller
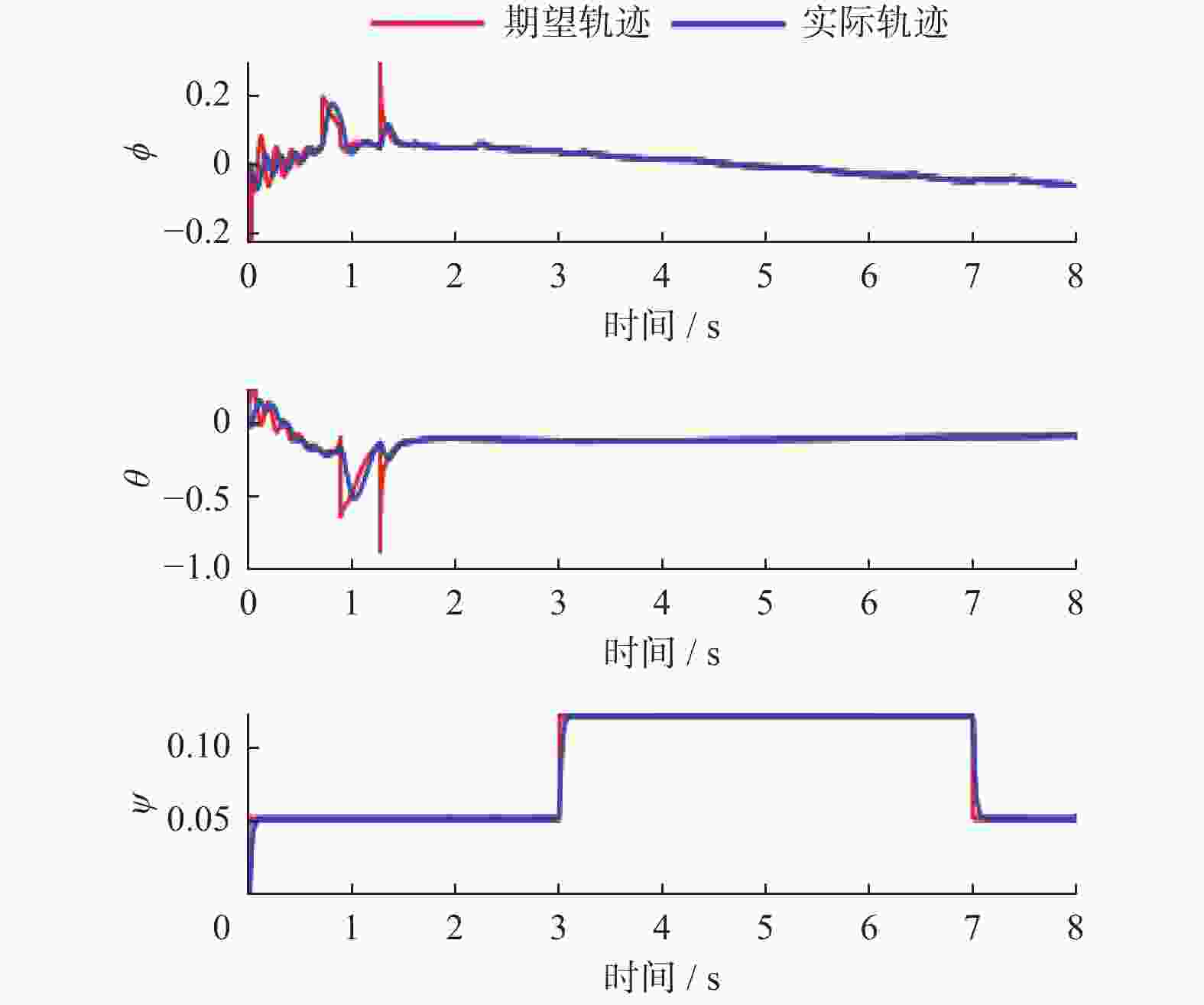
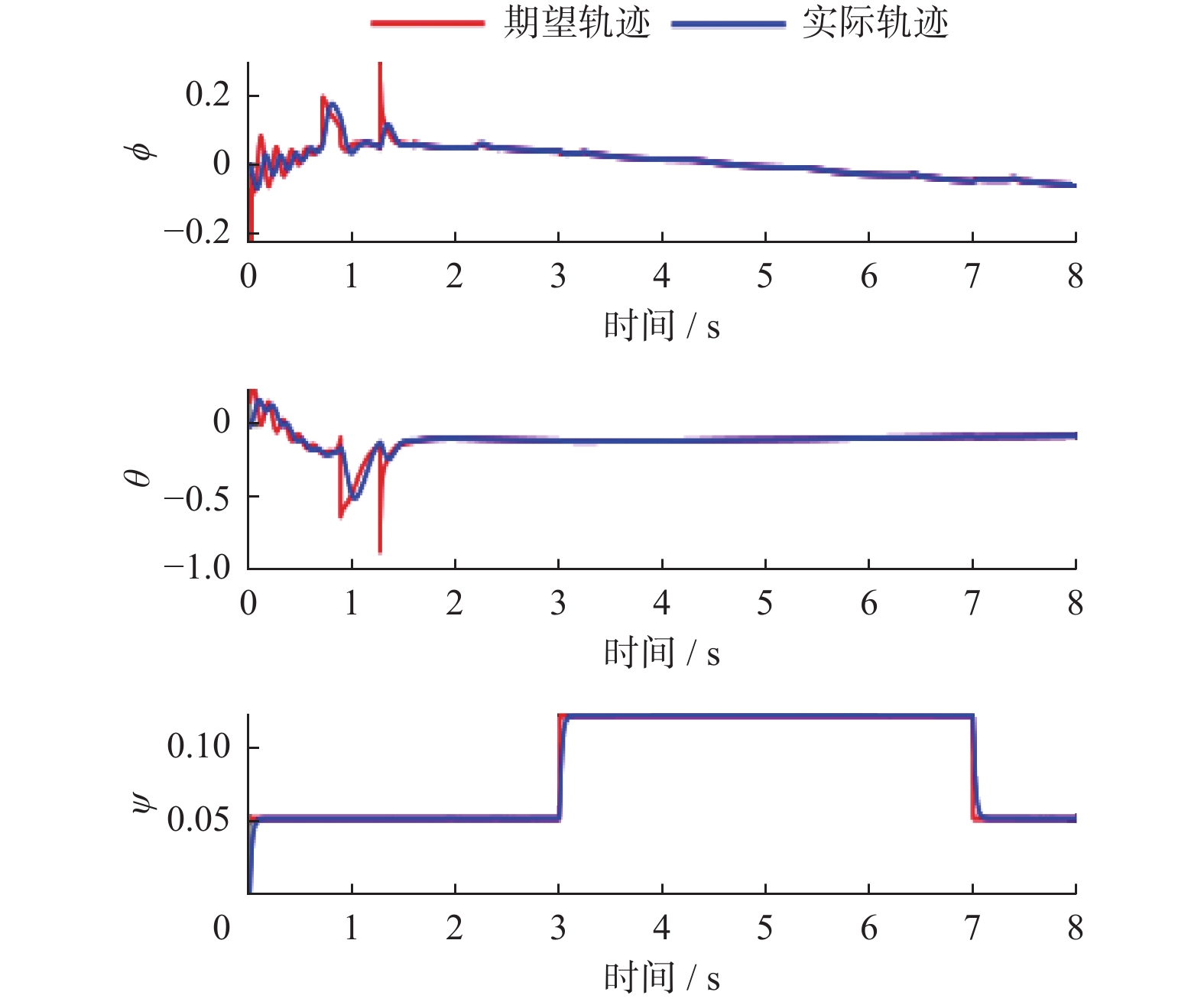
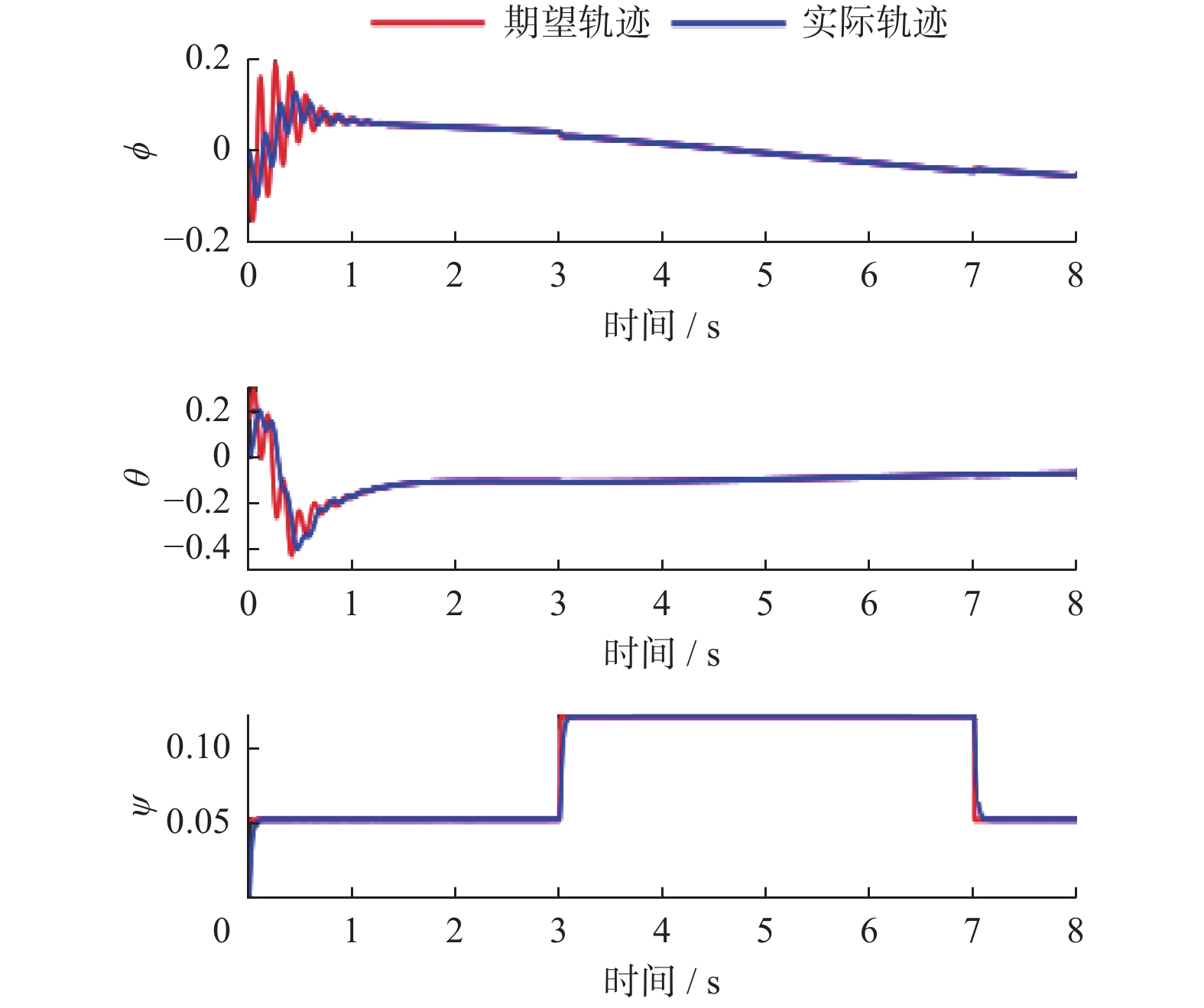
图 3 滑模控制器下的姿态角跟踪轨迹
Figure 3. Attitude angle tracking trajectory under sliding-mode controller
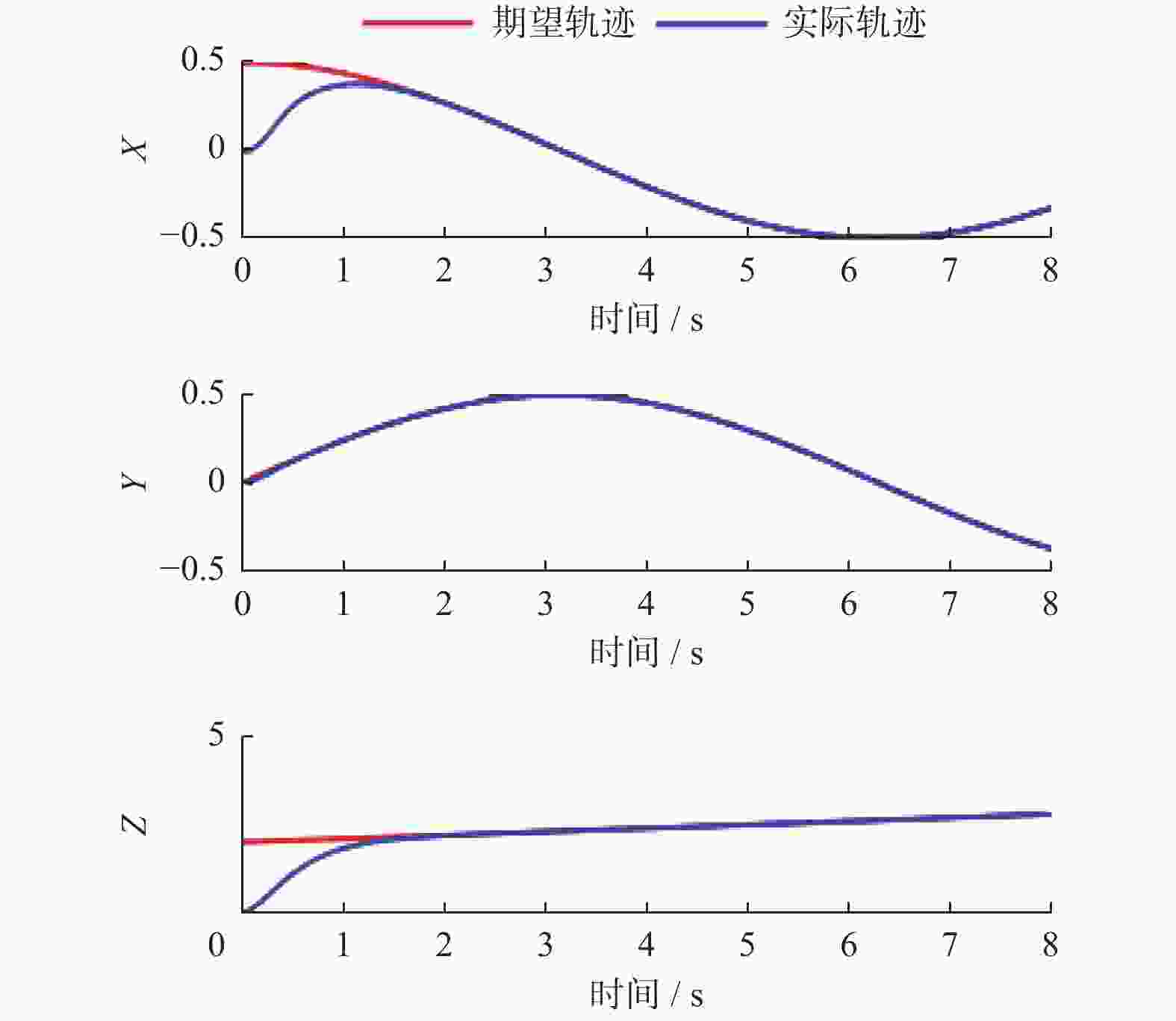
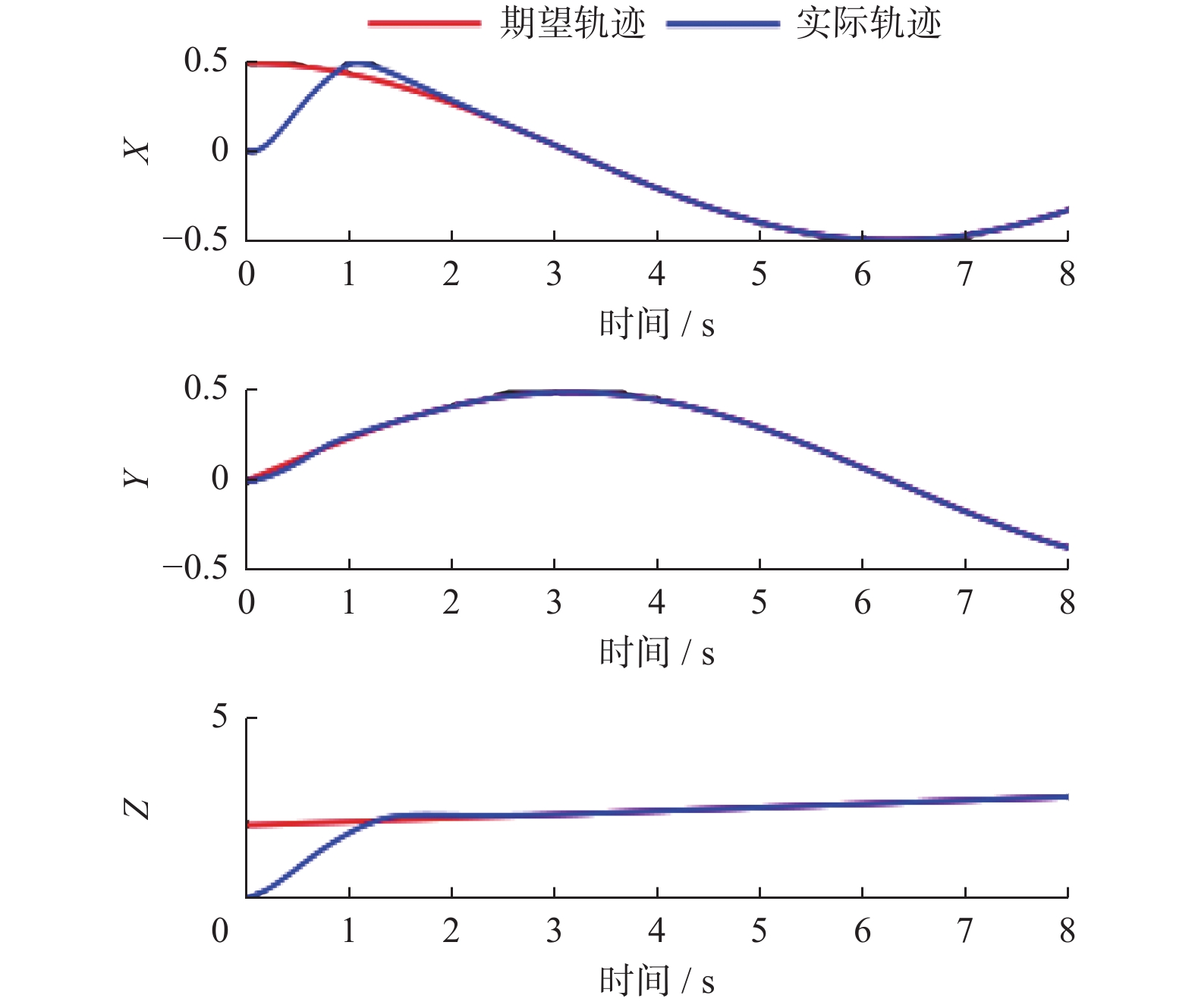
图 4 滑模自抗扰控制器下的位置跟踪轨迹
Figure 4. Position tracking trajectory under sliding-mode active disturbance rejection controller
-
[1] WANG F, GAO H M, WANG K, et al. Disturbance observer-based finite-time control design for a quadrotor UAV with external disturbance[J] . IEEE Transactions on Aerospace and Electronic Systems,2020,57(2):834 − 847. [2] AHI B, NOBAKHTI A. Hardware implementation of an ADRC controller on a gimbal mechanism[J] . IEEE Transactions on Control Systems Technology,2017,26(6):2268 − 2275. [3] XUE W C, BAI W Y, YANG S, et al. ADRC with adaptive extended state observer and its application to air–fuel ratio control in gasoline engines[J] . IEEE Transactions on Industrial Electronics,2015,62(9):5847 − 5857. doi: 10.1109/TIE.2015.2435004 [4] LIU J, GAI W D, ZHANG J, et al. Nonlinear adaptive backstepping with ESO for the quadrotor trajectory tracking control in the multiple disturbances[J] . International Journal of Control, Automation and Systems,2019,17(11):2754 − 2768. doi: 10.1007/s12555-018-0909-9 [5] SUN L, HE W, SUN C Y. Adaptive fuzzy relative pose control of spacecraft during rendezvous and proximity maneuvers[J] . IEEE Transactions on Fuzzy Systems,2018,26(6):3440 − 3451. doi: 10.1109/TFUZZ.2018.2833028 [6] 钱前, 张爱华, 张洁. 基于ESO的全驱动船舶递归滑模动态面输出反馈控制[J] . 上海工程技术大学学报,2020,34(1):22 − 27,40. doi: 10.3969/j.issn.1009-444X.2020.01.004 [7] 罗蕊, 师五喜, 李宝全. 受侧滑和滑移影响的移动机器人自抗扰控制[J] . 计算机应用,2018,38(5):1517 − 1522. [8] LIU J J, SUN M W, CHEN Z Q, et al. High AOA decoupling control for aircraft based on ADRC[J] . Journal of Systems Engineering and Electronics,2020,31(2):393 − 402. doi: 10.23919/JSEE.2020.000016 [9] XU S S D, CHEN C C, WU Z L. Study of nonsingular fast terminal sliding-mode fault-tolerant control[J] . IEEE Transactions on Industrial Electronics,2015,62(6):3906 − 3913. [10] WANG F, GAO H M, WANG K, et al. Disturbance observer-based finite-time control design for a quadrotor UAV with external disturbance[J] . IEEE Transactions on Aerospace and Electronic Systems,2021,57(2):834 − 847. [11] YANG H J, CHENG L, XIA Y Q, et al. Active disturbance rejection attitude control for a dual closed-loop quadrotor under gust wind[J] . IEEE Transactions on Control Systems Technology,2018,26(4):1400 − 1405. doi: 10.1109/TCST.2017.2710951 [12] LIU X, ZHANG M J, ROGERS E. Trajectory tracking control for autonomous underwater vehicles based on fuzzy re-planning of a local desired trajectory[J] . IEEE Transactions on Vehicular Technology,2019,68(12):11657 − 11667. [13] YOU S, KIM K, MOON J, et al. Extended state observer based robust position tracking control using nonlinear damping gain for quadrotors with external disturbance[J] . IEEE Access,2020,8:174558 − 174567. doi: 10.1109/ACCESS.2020.3025969 [14] RAFFO G V, ORTEGA M G, RUBIO F R. An integral predictive/nonlinear H∞ control structure for a quadrotor helicopter[J] . Automatica,2010,46(1):29 − 39. doi: 10.1016/j.automatica.2009.10.018 -

 下载:
下载:


 点击查看大图
点击查看大图
图(5)
计量
- 文章访问数: 1799
- HTML全文浏览量: 440
- PDF下载量: 297
- 被引次数: 0
