

Unmanned vehicle trajectory tracking control based on weighted variable time domain MPC
-
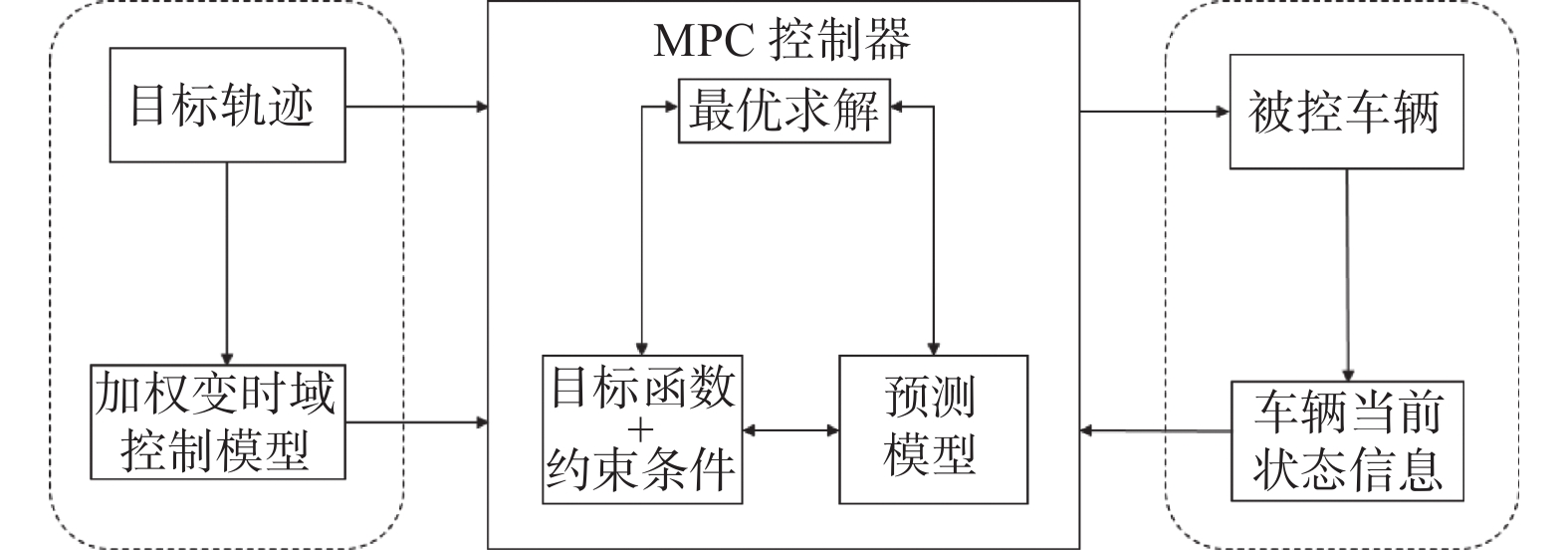
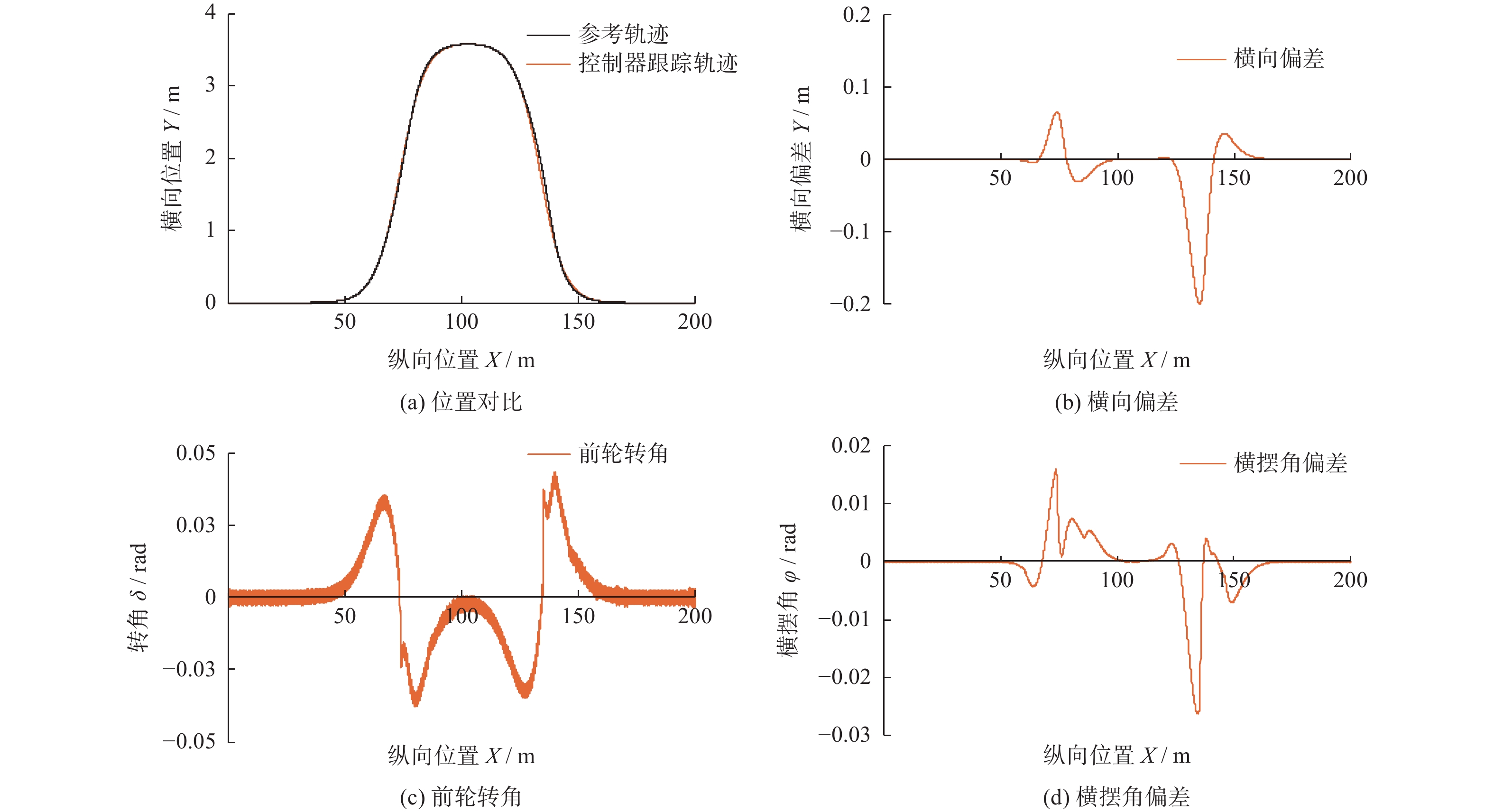
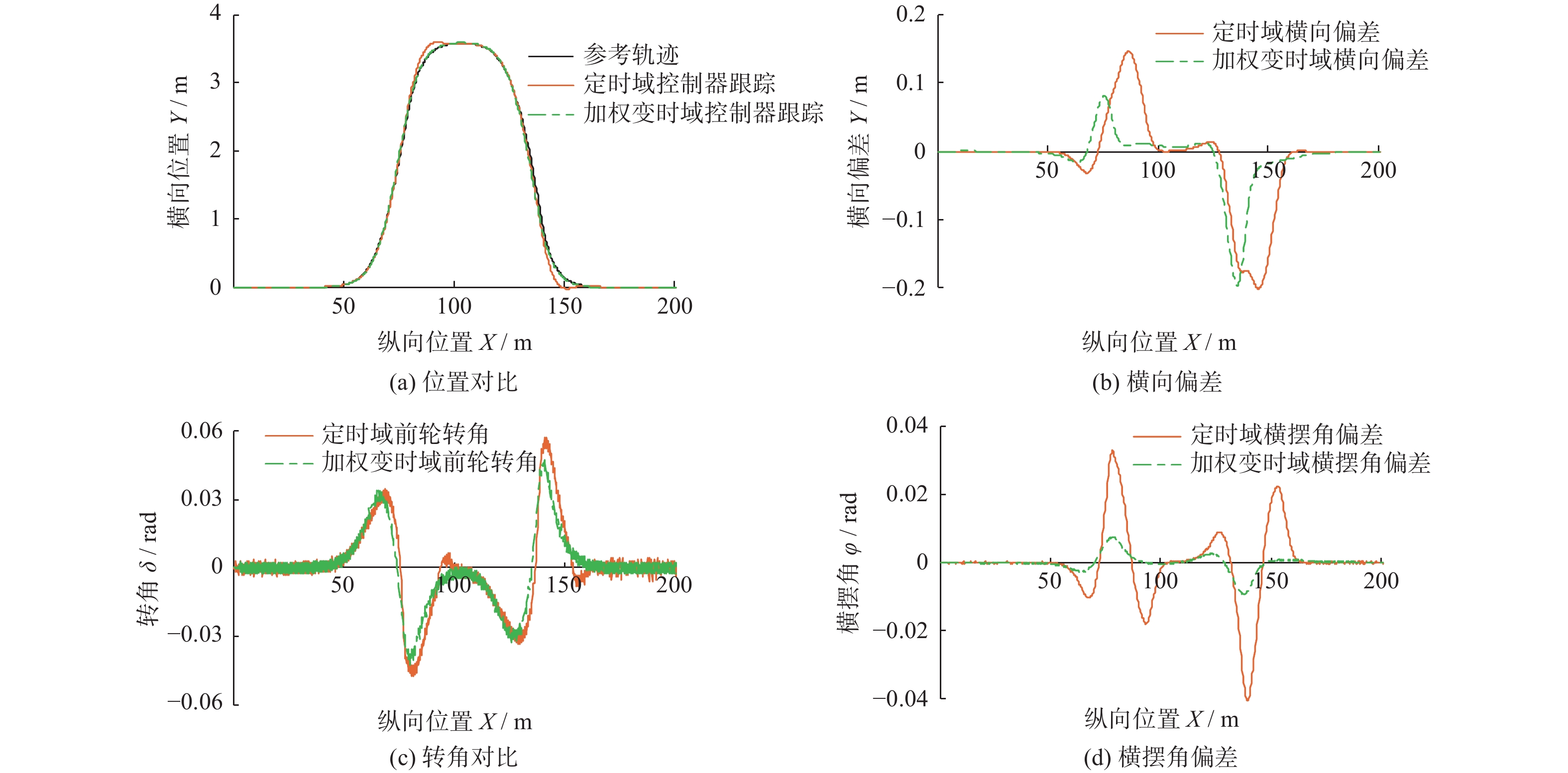
摘要: 为提高无人车辆轨迹跟踪的准确性和稳定性,提出一种基于加权变时域模型预测控制(MPC)的车辆运动控制方法。通过灰色关联分析法确定不同速度工况下的最优时域,使用傅里叶逼近法对时域参数进行拟合,将控制器计算时间作为权重系数,得到时域参数随车速变化的加权变时域MPC半经验模型。该模型可根据车辆轨迹跟踪速度的变化选择相对最优时域,提升控制器在不同车速下跟踪的精度和稳定性。选取50和100 km/h为代表车速,对传统定时域MPC控制器和加权变时域MPC控制器的控制效果仿真对比。结果表明:加权变时域控制器有效提升了控制器跟踪性能,最大横向偏差降低1.98%,最大横摆角偏差降低60%,控制器求解时间减少7.2%,同时对不同的目标车速工况也有较强的适应性。Abstract: In order to improve the accuracy and stability of unmanned vehicle trajectory tracking, a vehicle motion control method based on weighted variable time domain model predictive control (MPC) was proposed. The grey relational analysis method was used to determine the optimal time domain under different speed conditions, and the Fourier approximation method was used to fit the time domain parameters. Taking the controller calculation time as the weight coefficient, a weighted variable time domain MPC semi-empirical model with time domain parameters varying with vehicle speeds was obtained. The model can select the relative optimal time domain according to the change of vehicle trajectory tracking speed, and improve the tracking accuracy and stability of the controller under different vehicle speeds. Selecting 50 and 100 km/h as representative vehicle speeds, the control effects of the traditional time-domain MPC controller and the weighted time-domain MPC controller were compared by simulation experiments. The results show that the weighted variable time domain controller can effectively improve the tracking performance of the controller, the maximum lateral deviation is reduced by 1.98%, the maximum yaw angle deviation is reduced by 60%, and the controller solution time is reduced by 7.2%. And it also has strong adaptability to different target speed conditions.
-
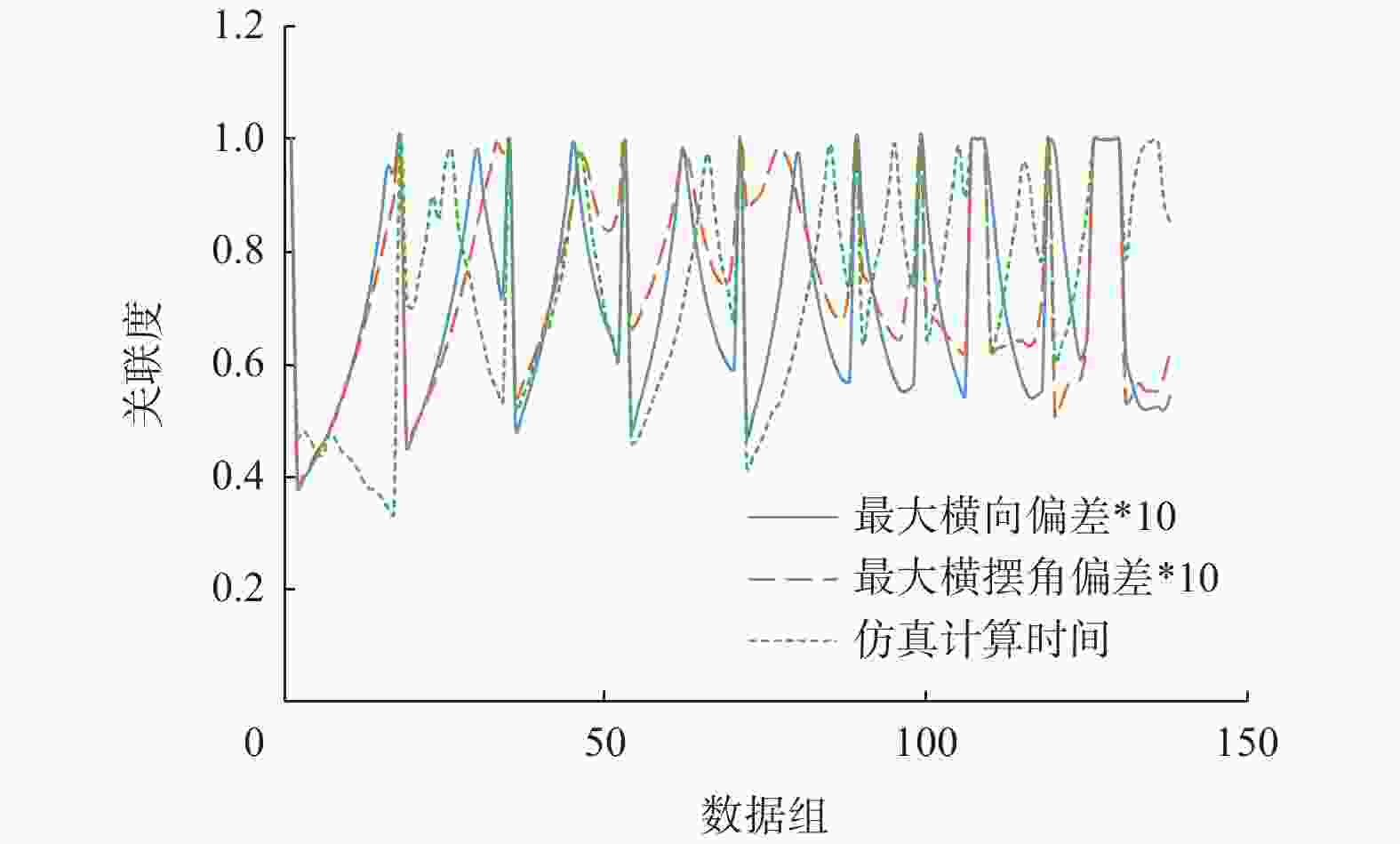
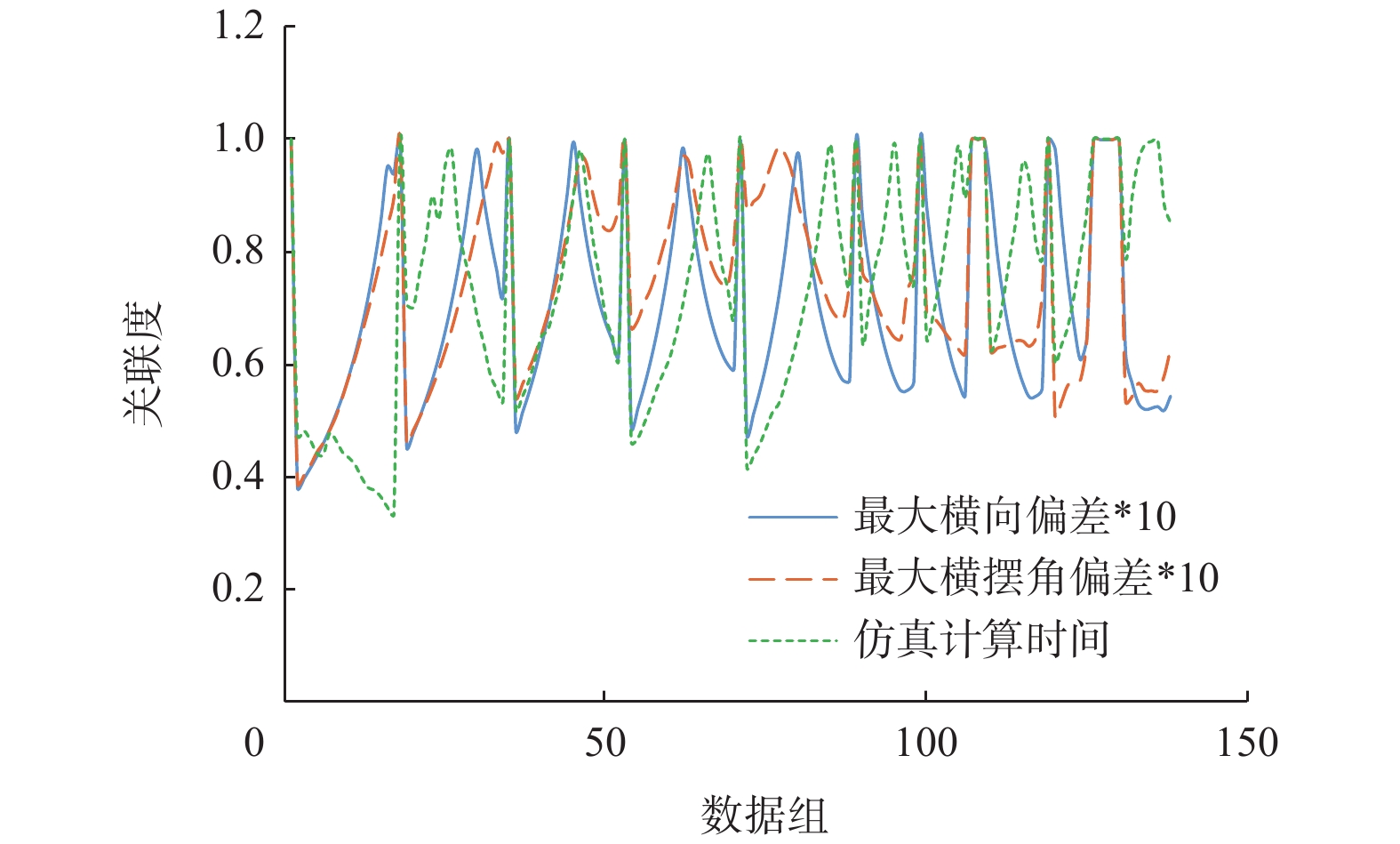
图 3 预测时域Np与评价项关联系数图
Figure 3. Correlation coefficient diagram of prediction time domain Np and evaluation items
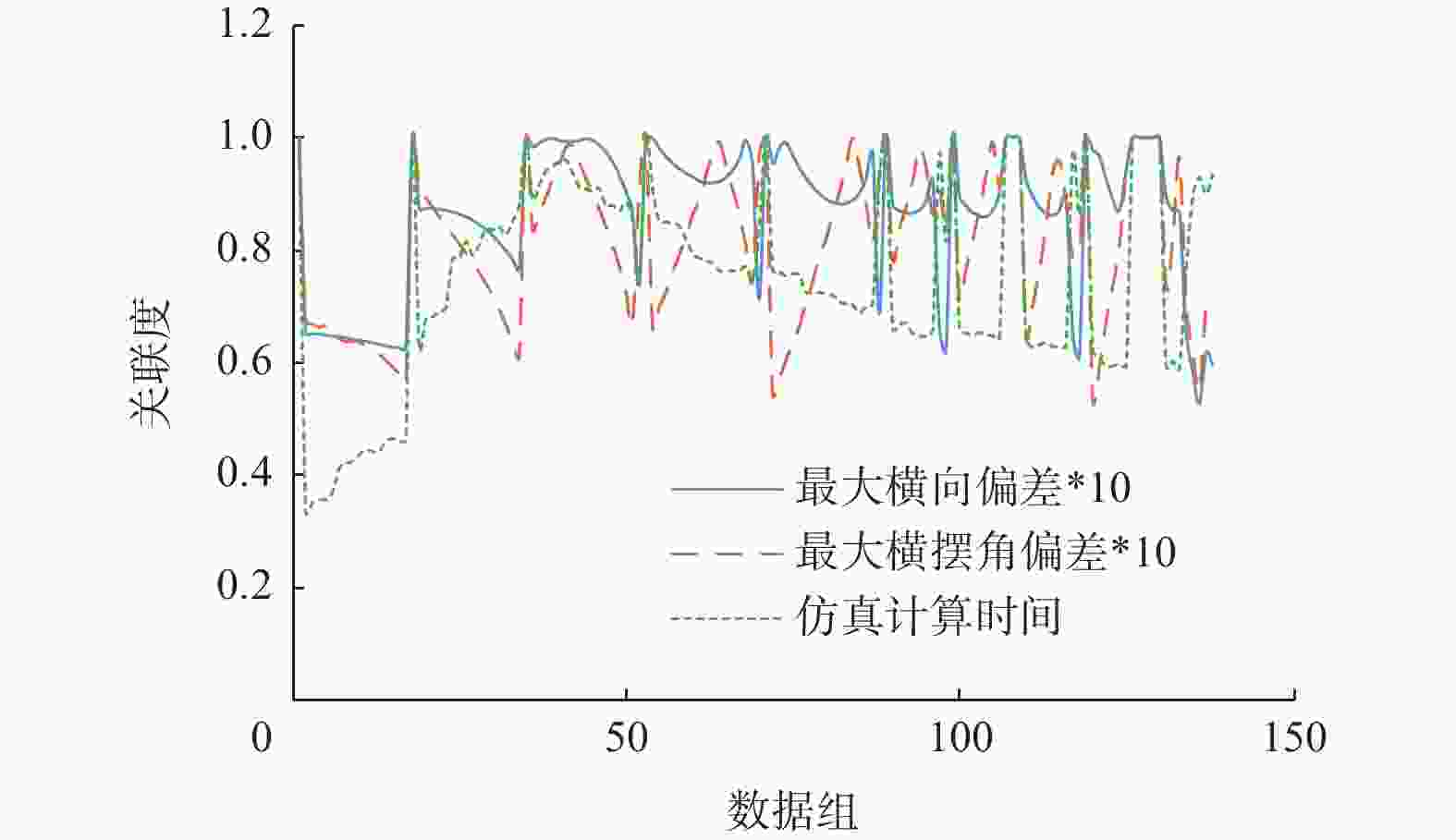
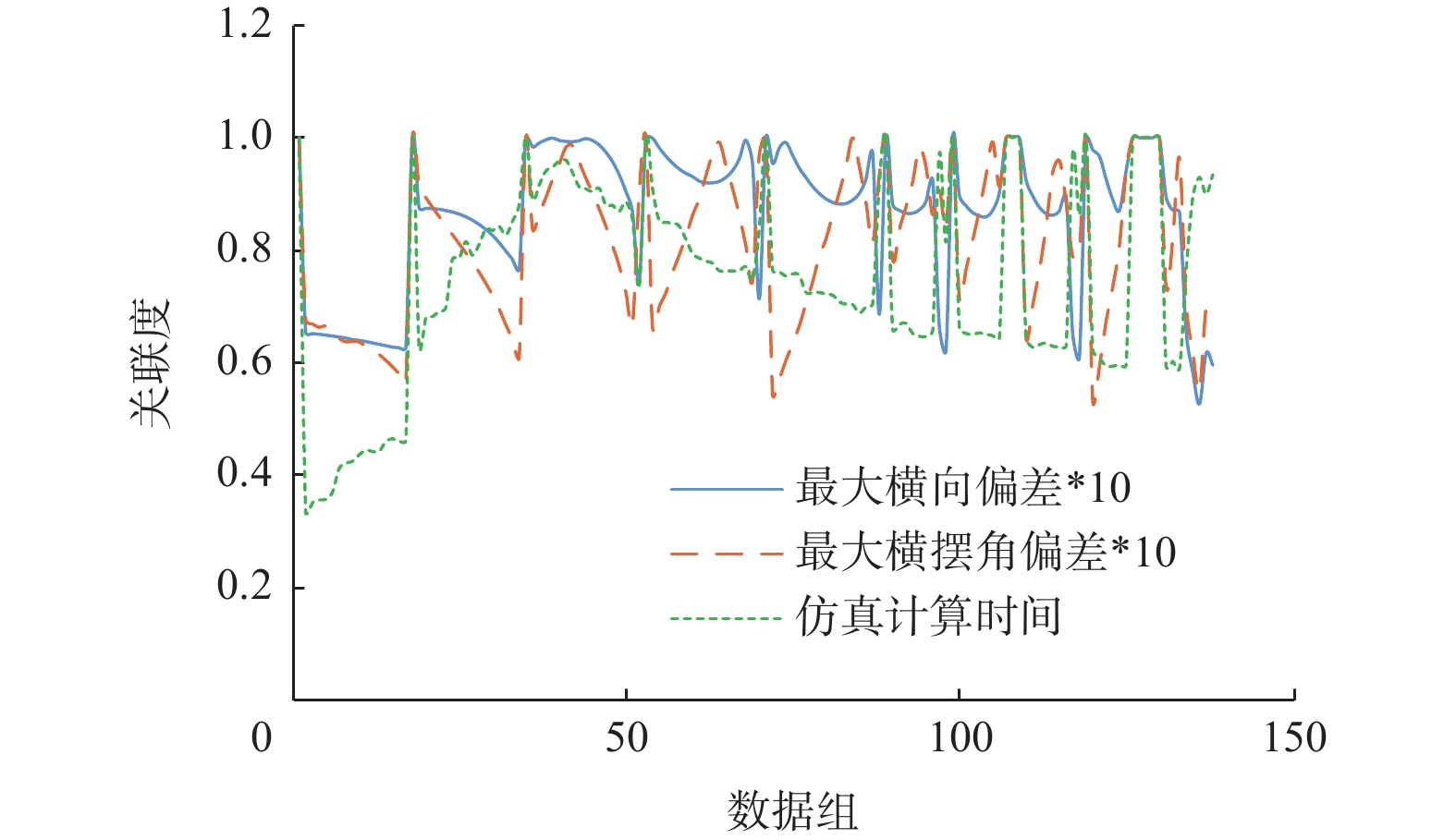
图 4 控制时域Nc与评价项关联系数图
Figure 4. Correlation coefficient diagram between control time domain Nc and evaluation items
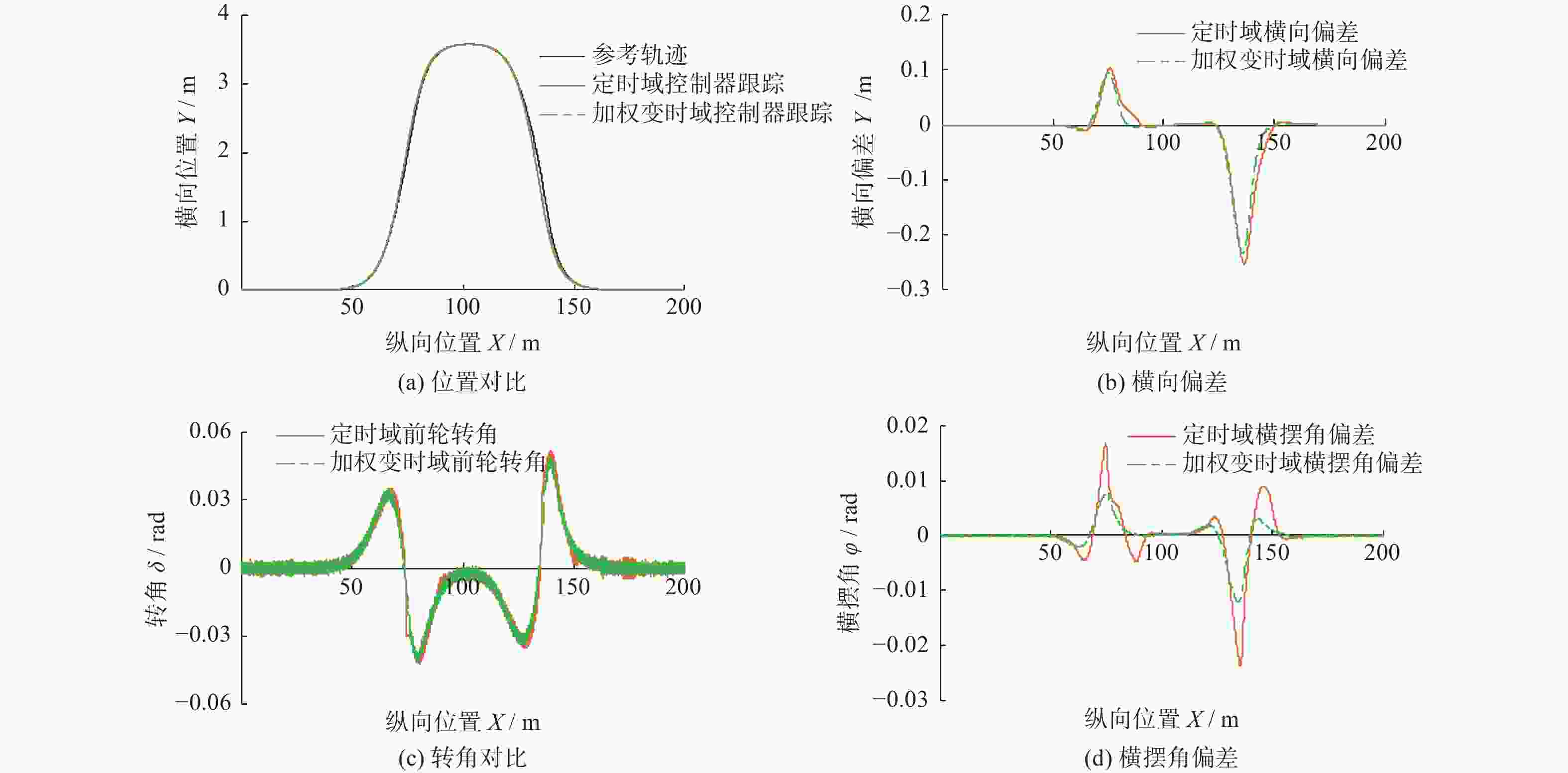
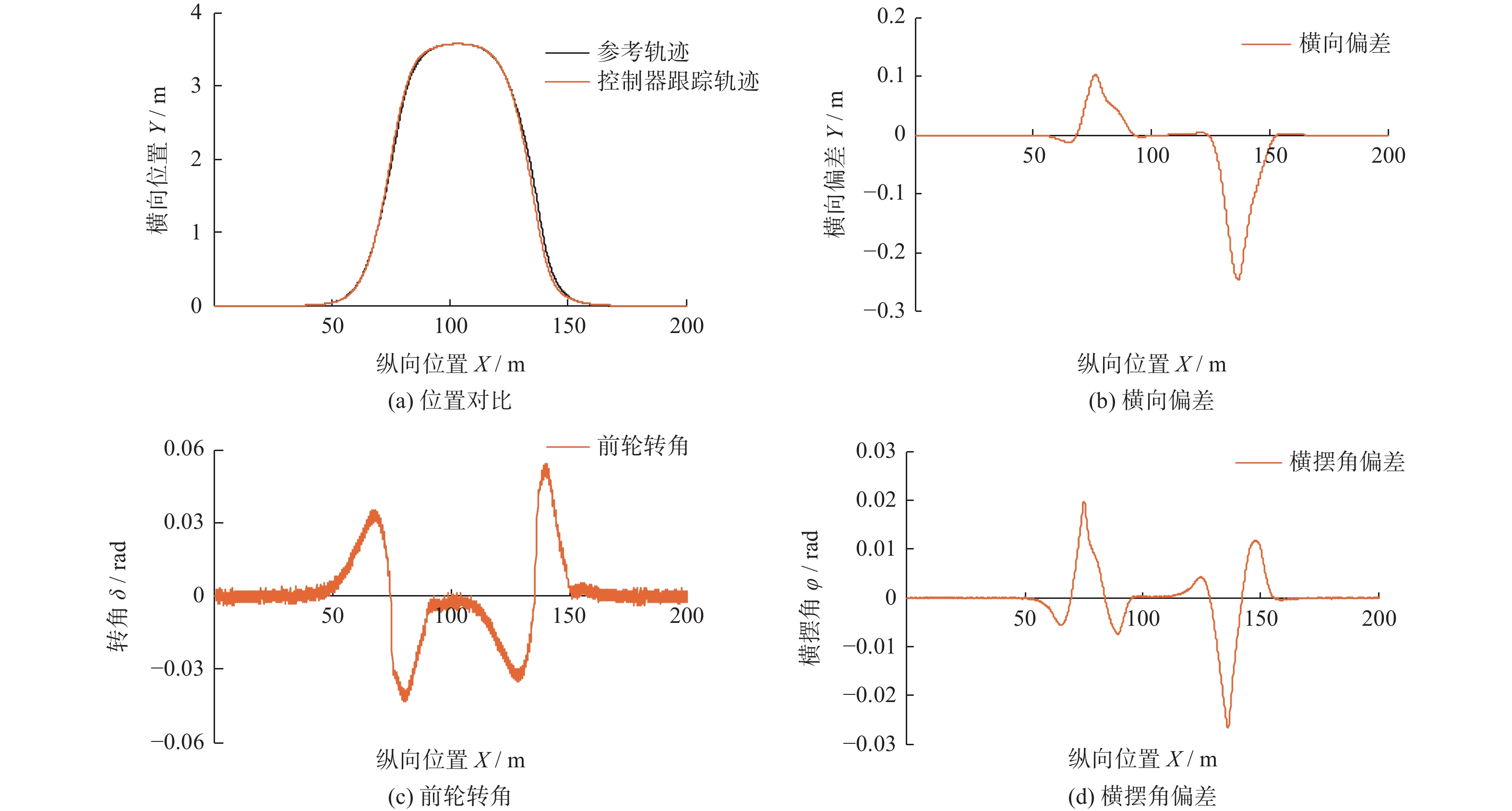
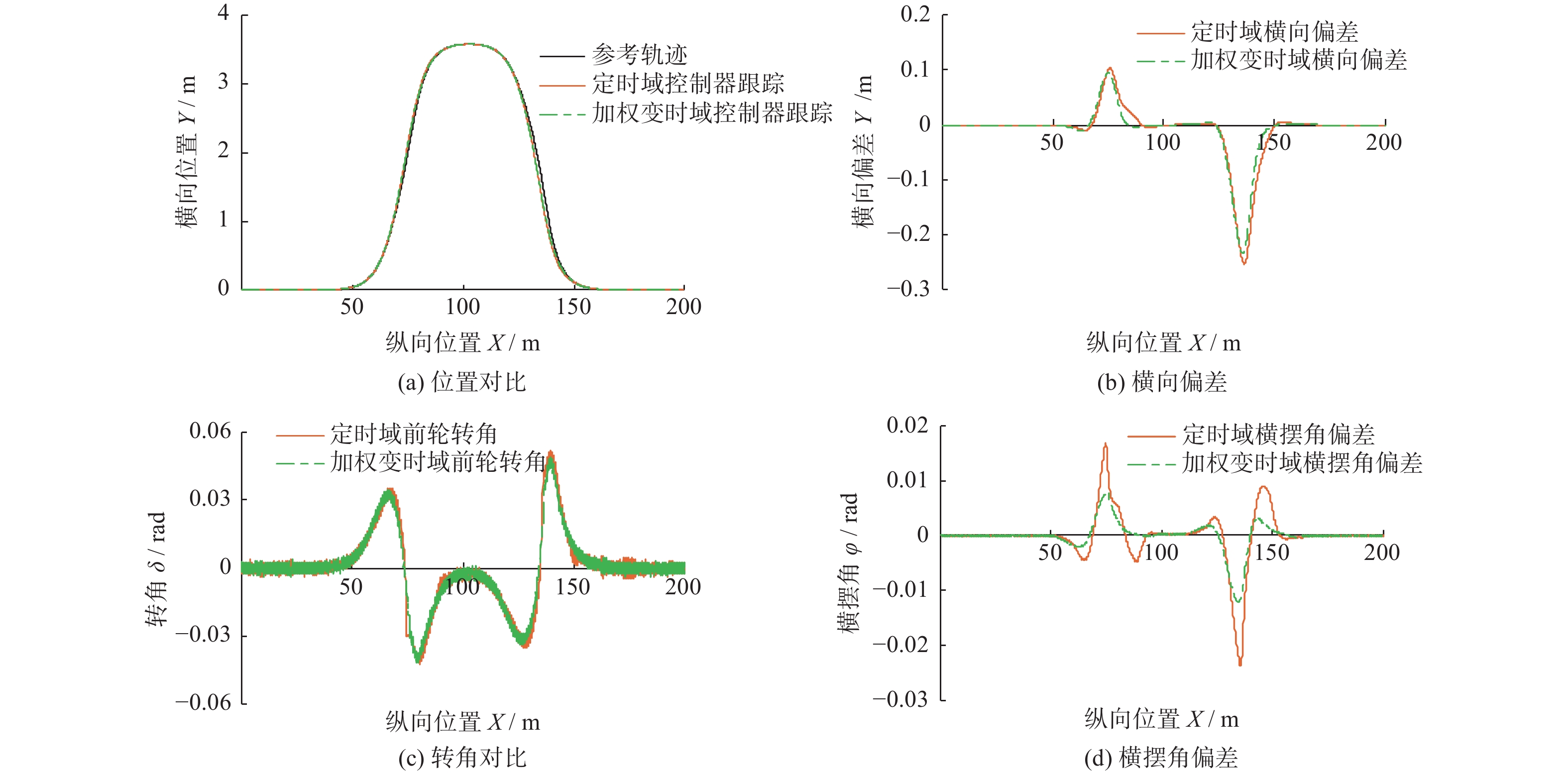
图 10 50 km/h下车辆跟踪控制效果对比
Figure 10. Comparison of vehicle tracking control effects at 50 km/h
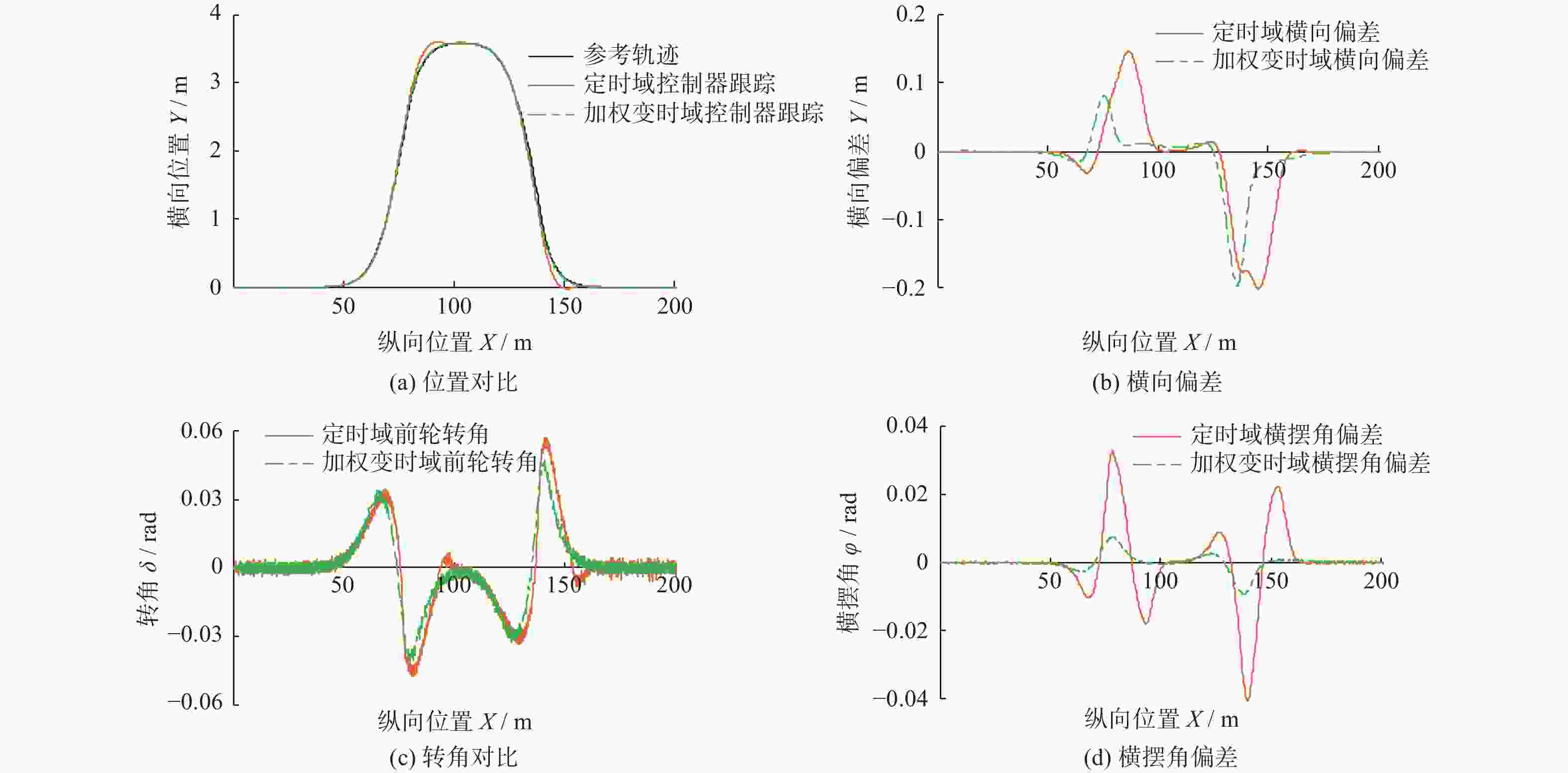
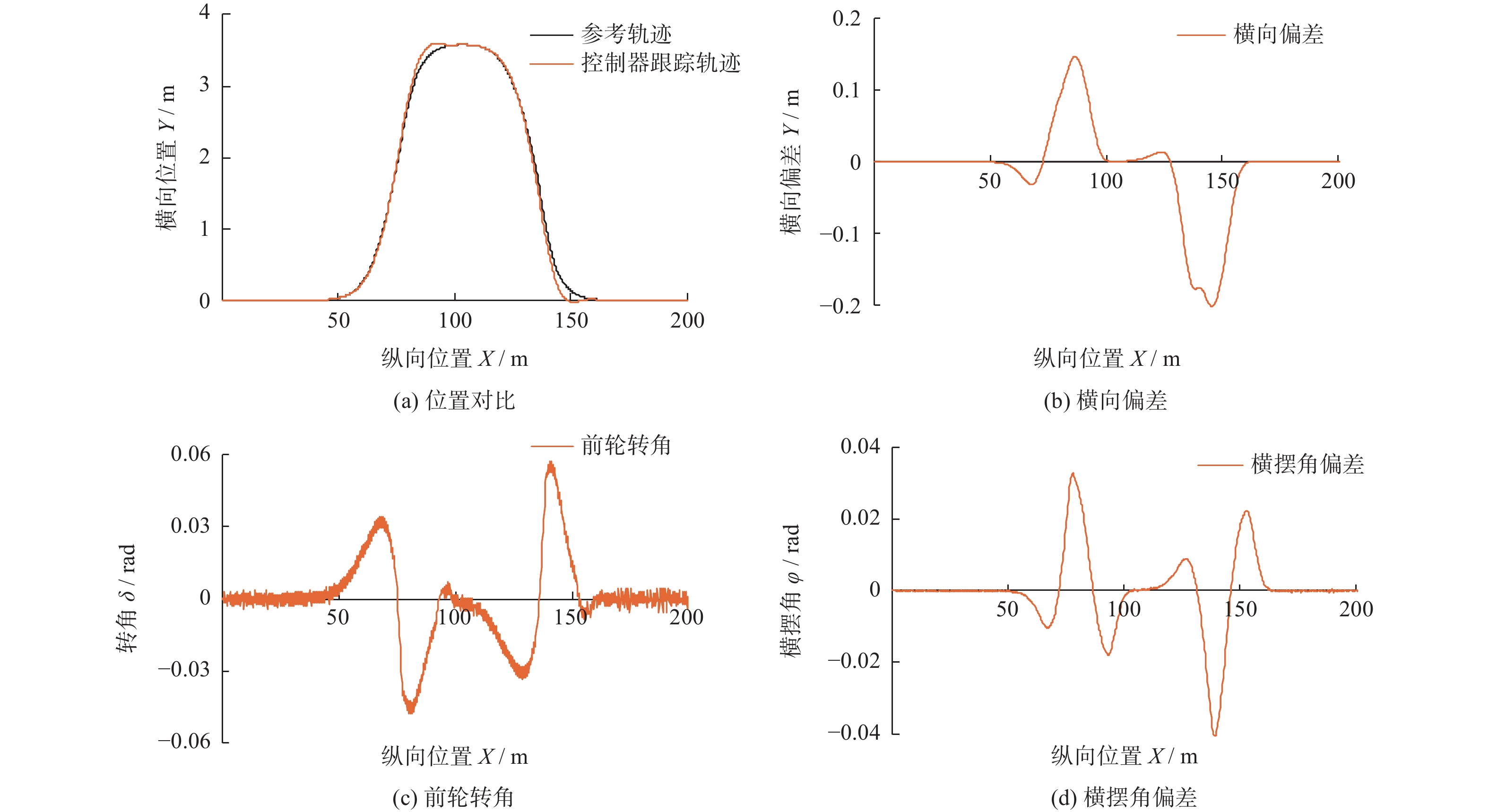
图 11 100 km/h下车辆跟踪控制效果对比
Figure 11. Comparison of vehicle tracking control effects at 100 km/h
表 1 灰色关联度排名
Table 1. Ranking of gray relational degree
评价项 母序列 关联度 排名 最大横摆角偏差 Np 0.744 1 Nc 0.815 2 最大横向偏差 Np 0.708 3 Nc 0.866 1 仿真计算时间 Np 0.736 2 Nc 0.750 3  下载: 导出CSV
下载: 导出CSV
表 2 控制器参数取值
Table 2. Controller parameters
参数 取值 预测时域Np 30 采样周期t/s 0.01 输出权重矩阵Q ${{\boldsymbol{I}}_{Nx \times Np} }$ 控制量权重矩R ${{\boldsymbol{I}}_{Nc \times Nu} }$ 松弛因子$\xi $ 10
下载: 导出CSV
-
[1] 龚建伟, 刘凯, 齐建永. 无人驾驶车辆模型预测控制(第二版)[M]. 北京: 北京理工大学出版社, 2020. [2] 吴欣欣. 基于模型预测控制的智能车辆轨迹跟踪控制方法研究[D]. 合肥: 合肥工业大学, 2020. [3] 孙银健. 基于模型预测控制的无人驾驶车辆轨迹跟踪控制算法研究[D]. 北京: 北京理工大学, 2015. [4] 庞辉, 刘楠, 刘敏豪, 等. 基于线性时变模型预测控制的自主车辆轨迹跟踪控制器设计与验证[J] . 机械工程学报,2022,58(24):264 − 274. [5] 杨君, 马戎, 刘婷, 等. 基于模糊神经网络的智能车辆路径跟踪[J] . 计算机仿真,2012,29(7):368 − 371. [6] 肖宗鑫, 李晓杰, 肖宗烁, 等. 基于RBF神经网络优化的无人驾驶车辆增量线性模型预测轨迹跟踪控制研究[J] . 重庆理工大学学报(自然科学),2021,35(3):36 − 45. [7] ZHANG B, ZONG C, CHEN G, et al. An adaptive-prediction-horizon model prediction control for path tracking in a four-wheel independent control electric vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2019, 233(12): 3246−3262. [8] 邹凯. 基于模型预测控制的智能汽车轨迹跟踪与避障控制研究[D]. 镇江: 江苏大学, 2021. [9] 邓涛, 罗俊林, 汪明明. 基于MPC与EKF算法的电动汽车状态估计与横向稳定性控制[J] . 汽车安全与节能学报,2017,8(3):287 − 295. [10] 李耀华, 范吉康, 刘洋, 等. 自适应双时域参数MPC的智能车辆路径规划与跟踪控制[J] . 汽车安全与节能学报,2021,12(4):528 − 539. [11] 杜荣华, 胡鸿飞, 高凯, 等. 基于变预测时域MPC的自动驾驶汽车轨迹跟踪控制研究[J] . 机械工程学报,2022,58(24):275 − 288. [12] 刘志强, 张晴. 自适应时域参数MPC的智能车辆轨迹跟踪控制[J] . 郑州大学学报(工学版),2024,45(1):47 − 53. [13] 金辉, 鲁坤. 基于多参数自适应优化的智能车轨迹跟踪研究[J] . 中国公路学报,2023,36(5):260 − 272. [14] 李畅, 张佳, 孙中奇, 等. 基于模型预测控制的无人车辆轨迹跟踪控制[J] . 无人系统技术,2021,4(6):46 − 56. [15] 高元龙. 基于模型预测控制的轨迹跟踪自动驾驶系统[D]. 大连: 大连理工大学, 2019. [16] 谢辉, 刘爽爽. 基于模型预测控制的无人驾驶汽车横纵向运动控制[J] . 汽车安全与节能学报,2019,10(3):326 − 333. [17] 邓国红, 肖皓鑫, 韩龙海, 等. 基于模型预测控制的车辆横纵向跟踪控制[J] . 重庆理工大学学报(自然科学),2021,35(11):18 − 26, 57. [18] YINGJIE L, TENGFEI Y, RONGCHEN Z. Trajectory tracking model predictive controller design for autonomous vehicles with updating constrains of tire characteristics[J]. World Electric Vehicle Journal, 2023, 14(2): 54. [19] 唐传茵, 赵懿峰, 赵亚峰, 等. 智能车辆轨迹跟踪控制方法研究[J] . 东北大学学报(自然科学版),2020,41(9):1297 − 1303. [20] 魏子茹, 卢延辉, 王鹏宇, 等. 基于CRITIC法的灰色关联理论在无人驾驶车辆测试评价中的应用[J] . 机械工程学报,2021,57(12):99 − 108. [21] 李彬鹏, 茅健, 杨杰, 等. 基于多特征点参数权值优化的蒙皮点云去噪研究[J] . 航空工程进展,2023,14(6):45 − 55. [22] 孙哲, 邹镓扬, 潘佳怡, 等. 自适应积分终端滑模的自主车辆路径跟踪控制[J] . 浙江工业大学学报,2021,49(5):494 − 502. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 950
- HTML全文浏览量: 1139
- PDF下载量: 151
- 被引次数: 0
